
Abstract
The magneto-rheological (MR) dampers used in automotive suspension improve the energy dissipation capacity for the vertical oscillations of the car body and wheel of the vehicle by increasing the damping force developed by piston motion. The determining of the time constant of the magneto-rheological fluid is essential in order to build a realistic dynamic model of an actuator, needed for implementing a real time control system provided with a comfort feedback. In this paper the authors compare the information collected from the dedicated literature, which currently are relatively restricted, to the results obtained from their own experimental determinations. The final objective of the paper is to help the optimal design a control structure for the assembly of the car magneto-rheological dampers.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The magneto-rheological fluids should have an acceptable low viscosity in the absence of the magnetic forces, but at the same time, they should be able to develop a high pressure drop when they are subjected at high values of the magnetic flux density. Concerning the magneto-rheological dampers control, the most important aspect which must be taken into account is the response time to the magnetic field change. The response time depends on: the size and shape of the magnetic particles in suspension in the fluid, the fluid viscosity, the conductivity of particles etc.
Two significant factors for controlling the damping force of a MR fluid shock absorber through a damper controller are considered in the paper [1]: tracking ability of the controlled damping force to the desired damping force, and energy needed for the MR fluid shock absorber.
In the paper [2] it was studied the behavior of the magneto-rheological shock absorber with a pneumatic suspension. The results showed that the tested suspension obtains the same roll angle levels as in a comparable passive suspension while improving the ride comfort by reducing acceleration by up to 30 %.
A bounded stochastic optimal semi-active control strategy for random excited hysteretic systems by using MR damper is proposed and illustrated by an example of a single degree-of-freedom hysteretic system in paper [3]. The results showed that the control strategy proposed by the authors has a high control effectiveness and efficiency [3].
The main characteristic of MR fluids is their ability to generate forces that can be controlled with a magnetic field produced by an electromagnet or a permanent magnet. Under the influence of an applied magnetic field, the MR particles join together, forming a chain (Fig. 1a). This chain once formed, induces a reversible yield stress in the fluid. The yield stress of the MR fluid is continuously and quickly adjustable, because it responds to the intensity of the applied magnetic field. The magnetic field applied leads to the formation of chains of particles in the direction of magnetic field lines (Fig. 1b).

The magnetorheological fluid microstructure: 1 and 2 – magnetic poles; 3 – ferromagnetic particle; 4 – MR fluid; A – power source
Considering the fluid mechanics, the behavior of the MR fluid in the absence of a magnetic field can be described by the Newtonian mechanics, while, in the presence of the magnetic field, it exhibits the behavior of the Bingham model [4].
If the MR fluid is used as a controllable actuator in different application devices, the fluid can behave into three different modes, as shown in Fig. 2. The MR fluids can be also integrated into conventional structures (called smart structures). The complex mode of intelligent structure can be controlled by adjusting the intensity of the magnetic field. The MR fluids must have high yield stress at maximum magnetic fields and low viscosity in the absence of a magnetic field. Also, the MR effect should be stable within a wide temperature.

The operating modes of the MR fluids
In general, the particles are in spherical shape. Its geometry is preferred for low magnetic anisotropy, lubricity and durability [5]. The MR shock absorber is constrained in a specific volume and the optimization problem identifies the geometric dimensions of the shock absorber which minimize an objective function. The objective function refers to: the damping force, the dynamic range, and the inductive time constant of shock absorber [6].
2 Test Bench Presentation
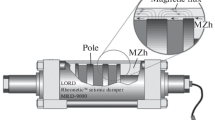
The static and dynamic performances of the MR shock absorbers are determined for evaluating the efficiency of the vehicle suspension systems. In the Fig. 3 it is shown a magneto-rheological damper. The stand is made up of a fast electrohydraulic servomechanism, provided with position, velocity, amperage and force transducers; the servomechanism and damper tested are mounted in a rigid frame (Fig. 4).

The tested magneto-rheological shock absorber (Chevrolet Corvette)

Partial view of the magneto-rheological shock absorbers test bench
The stand includes state of the art electro-hydraulic components of high precision. For the servomechanism control and for data acquisition is used an industrial type electronic computer PXI, equipped with a data acquisition board produced by the National Instruments Corporation. The excitation of the shock absorber is made with a position signal, similarly to the real situation of operation. The input signal may be sinusoidal, triangular or compound. The output is the damping force developed by the shock absorber for different velocities.
3 Experimental Results
The dynamic behavior of the magneto-rheological damper shown in Fig. 4 was analyzed at different frequencies and different values of the electrical current intensity. The input signals studied were: sine, triangular and rectangular. In this paper are presented some results obtained from the damper test bench. In the Figs. 5, 6 and 7 are presented the types of input signals depending on the time, as well as the displacement of the magneto-rheological shock absorber. The period of the sine signal is 2 s and for triangular and rectangular signals is around 3.33 s. Generally, the road profile is described by a sinusoidal signal.

The variation in time of the displacement and input signal for the sine input signal

The variation in time of the displacement and input signal for the triangular input signal

The variation in time of the displacement and input signal for the rectangular input signal
The results obtained from the experimental researches show a significantly improved comfort when using a magneto-rheological damper compared to a classic one, which is due to the fact that the MR shock absorber allows the changing of the damping ratio depending on road conditions, thus maintaining the permanent contact between the tire and the road as a consequence of the increased damping force.
In the Fig. 8 it is presented the velocity of the magneto-rheological piston depending on the time, for different values of the current intensity. The period of the sine signal is 2 s. The maximum velocity of the piston is 60 mm/s, practically constant for different values of the current intensity.

The variation in time of the piston velocity for different values of the current intensity for sine input signal
In Fig. 9 it is presented the damping characteristic for two dampers (classical and MR), in coordinate force-velocity, for a sine signal input.

The damping characteristic F(v), for a magneto rheological and a classical damper
The maximum damping force for a classical damper is around 500 N while for magneto-rheological damper it is 1 kN, for a current intensity of 1 A. It is observed that the maximum damping force for the MR damper is two times higher than the force developed by the classic shock absorber. The period of the sine signal for both dampers is 2 s.
For a magnetizing system with four coils, the damping ratio could be increased by up to three times for an excitation current of only 2 A. Such current could be reduced to less than 1 A if the magnetizing system uses eight small cores. The fuzzy intelligent controller reduces effectively the vertical vibration and improves the ride comfort and handling stability of the vehicle [7, 8]. The magneto-rheological shock absorbers have a semi-controllable damping force output which is dependent on the electric current intensity applied to the shock absorber, as well as the relative velocity. The MR dampers can be used also for motorcycles; high controllability and low power consumption are two vital considerations for motorcycles [9, 10].
4 Conclusions
The maximum damping force developed by the MR damper increased considerably compared to the classical damper for a velocity of the piston of 0.06 m/s. The hysteresis loop increased for the MR shock absorber. The MR damper is used specially for sport and luxury cars, because the magneto-rheological fluid is expensive, but it offers the possibility of adjusting the damping ratio to improve the comfort and the car stability. The MR shock absorbers are used in semi-active suspensions. The input signal type can cause a brutal functioning of the damper. The rectangular signal input produces a hard functioning compared to the other two, like sine and triangular.
The design of the suspension controller using MR shock absorbers has to take into account both typical road profiles and the dynamic behavior of the used shock absorbers established by the experimental test bench containing all the components of the suspension.
References
Wang, D.H., Liao, W.H.: Semi-active controllers for magnetorheological fluid dampers. J. Intell. Mater. Syst. Struct. 16(11–12), 983–993 (2005). doi:10.1177/1045389X05055281
Morales, A., Nieto, A., Chicharro, J., Pintado, P.: A semi-active vehicle suspension based on pneumatic springs and magnetorheological dampers. J. Vib. Control (2016). doi:10.1177/1077546316653004
Huan, R.H., Li, X.P., Wu, Y.J., Zhu, W.Q.: Optimal bounded semi-active control of hysteretic systems with MR damper. Adv. Struct. Eng. 13(6), 1199–1205 (2010). doi:10.1260/1369-4332.13.6.1199
Choi, S.B., Han, Y.M.: Magnetorheological Fluid Technology-Applications in Vehicle Systems. CRC Press, Boca Raton (2015). ISBN 978-1-4398-5673-4
Gołdasz, J., Sapiński, B.: Insight into Magnetorheological Shock Absorbers. Springer, Heidelberg (2015). ISBN 978-3-319-13232-7
Nguyen, Q.H. Choi, S.B.: Optimal design of a vehicle magnetorheological damper considering the damping force and dynamic range. Smart Mater. Struct. 18(1). IOP Publishing Ltd. (2008). doi:10.1088/0964-1726/18/1/015013
Sassi, S., Cherif, K., Mezghani, L., Thomas, M., Kotrane, A.: An innovative magnetorheological damper for automotive suspension: from design to experimental characterization. Smart Mater. Struct. 14(4). IOP Publishing Ltd. (2005) doi:10.1088/0964-1726/14/4/041
Rui, L., Chen, W.M., Yu, M., Liu, D.K.: Fuzzy intelligent control of automotive vibration via magneto-rheological damper. Cybern. Intell. Syst. 1, 503–507 (2004). doi:10.1109/ICCIS.2004.1460466. IEEE, Print ISBN: 0-7803-8643-4
Sandu, C., Southward, S., Richards, R.: Comparison of linear, nonlinear, hysteretic, and probabilistic models for magneto-rheological fluid dampers. ASME J. Dyn. Syst. Meas. Control 132(6), 164–172 (2010). Special Issue on “Physical System Modeling”
Ahmadian, M., Sandu, C.: An experimental evaluation of magneto-rheological front fork suspension for motorcycle applications. Int. J. Veh. Syst. Model. Test. 3(4), 296–311 (2008). doi:10.1504/IJVSMT.2008.025405
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Dobre, A., Vasiliu, N., Andreescu, C.N. (2017). Experimental Researches on the Magneto-Rheological Dampers Response to the Control Parameters. In: Chiru, A., Ispas, N. (eds) CONAT 2016 International Congress of Automotive and Transport Engineering. CONAT 2016. Springer, Cham. https://doi.org/10.1007/978-3-319-45447-4_28
Download citation
DOI: https://doi.org/10.1007/978-3-319-45447-4_28
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-45446-7
Online ISBN: 978-3-319-45447-4
eBook Packages: EngineeringEngineering (R0)