
Abstract
We have developed a collaborative robot system to deliver services to people. The Kukanchi system has been used as an intelligent space that comprises sensors, robots, and management servers. Specifically, we expanded and improved Kukanchi’s middleware functionality by adding sensors and robots outside the Kukanchi space. Furthermore, we verified the effectiveness of the system through a guidance service task using the task scheduler in the Kukanchi system. The task scheduler manages the service task by disassembling it and selects and sends requests to robots. In this study, we introduce the system and present the experimental results.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Household affairs and physical and information support, such as elderly care owing to an aging society and reductions in birth rate, has recently been requested in society. To cope with these problems, we expect robot technology to be deployed. However, it is difficult for a robot or a group of similar robots to solve all problems because a variety of services are requested by today’s society. Thus, an intelligent space for robot systems is a growing area of research. A mobile robot, sensors, and actuators are distributed over a network in the space, wherein they utilize each other’s information to efficiently perform a task [1, 2]. Furthermore, it is necessary to solve these problems for various robots to collaborate work.
To build a robot system comprising many robots from scratch, a significant amount of time and money is required. A solution to this is to use existing robots with only marginal modifications and realize such a framework. Thus, we have used the Kukanchi system [3] and RT middleware [4]. Here, we introduce a collaborative robot service, which utilizes the database that accumulates information regarding human beings, things, and robots in the developed intelligent space using Kukanchi as a platform.
2 Robot Collaboration Through the Database
2.1 Kukanchi Middleware
To realize the intelligent space, sensor and actuator networks, accumulation of the observed information, decision of support contents according to the observed situation, and task generation are important functions that should be integrated as a system. Therefore, Kukanchi middleware using RT middleware has been proposed as the basic system. The Kukanchi middleware has a processing module and a database and provides an abstraction interface with sensors, users, and robots. Thus, we can obtain environmental information using sensors and process and accumulate the gathered information. The existing robots in the space can provide services through commands that are issued when the system receives the service request. A Kukanchi system using robot service technology was developed in a model room of a home living environment to deliver services such carrying objects in the house [5]. Figure 1 shows the developed Kukanchi system. The system is expected to expand and provide other robot services using the middleware and database. Some major applications of this technology could include its introduction to shopping centers and as a guidance service to shops.

The Kukanchi system
2.2 Connection of a Robot to the Database
In the Kukanchi middleware, the database that accumulates the structured information of the space is called the Local Data Store (LDS) as shown in the service management system in Fig. 1. LDS can record the information about things, users, and robots existing in the space.
Acquisition and registration of the information to the database is performed by the abstraction interface of the Kukanchi middleware. Therefore, even an existing robot in the intelligent space can collaborate with other robots through the database after adding the Kukanchi middleware and a common interface. First, through sending and acquisition of the sensor information of the robot, it is possible to share the environmental information with other robots. Therefore, a mobile robot is considered as a mobile sensor in the intelligent space. The robot information of LDS shows the function and location of the robot in the space. The service is managed as a combination of tasks. The task scheduler implemented in Kukanchi judges the feasibility of the service and requests the assigned robot to perform the task. As a result, a service is realized through the collaboration of robots.
2.3 Task Scheduler
The task scheduler is an element of the Kukanchi system. It disassembles the user’s request into tasks that the robots can conduct, selects the robot that has the assigned function for the required task in the space, and orders the robot to perform the task. In this study, we improved the task scheduler to add the position information to each task as shown in Fig. 2. Figure 3 shows the example of the connection between the Kukanchi system and external robots. This connection was used in the experiment.

Improvement of the LDS component

Example of the connections in the Kukanchi system
3 Algorithm for Robot Selection
3.1 Disassembly of Service Task
To perform the robot collaboration work, we disassemble a series of services for a user to tasks. Then, the required function and position information are added to each task. The function is described when a task is to be performed and the position is described when the task needs collaboration between robots or between the robot and the user. The contents of the task and the function of the robot are all registered in the LDS in advance. Thus, the service is realized by allocating the task to the suitable robot.
3.2 Algorithm of Robot Selection
Under the condition that a task is conducted by a robot, the task is allocated to a robot using the following procedure:
-
(1)
Confirm which robot has the required function
-
(2)
Confirm the status of the robot to which the request is to be sent
-
(3)
Confirm if the robot position is adequate to satisfy the task
-
(4)
Add a robot with a movable function as a candidate because of a change in position.
On selecting and exploring the robot using the above procedure, the task can be allocated to the suitable robots. Figure 4 shows the breakdown of the task according to the requested task and the selected sequence. In each task, the suitable robot is selected by considering the location of the person.

Robot selection flow according to the task contents
4 Experiment of Collaborative Service
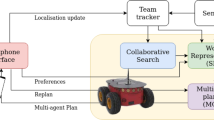
A demonstration of the guidance service as a collaborative service using various types of robots at multiple locations was conducted in the experiment as shown in Fig. 5. Figure 6 shows the control system of the collaborative service task. Figure 7 shows the experimental scene. However, the exhibition space is not shown. The robots are a reception robot on the desk, an interactive display that can communicate with a user, and a mobile robot acting as a guidance robot, as shown in Fig. 6. The interactive display shows the menu on the screen and detects the input when a user touches the menu as same as a computer touch panel. In the guidance service, the robot greets a user at the reception desk, the user selects the place where he/she wants to go using the interactive display, and the mobile robot guides the user to the desired place. This service was disassembled into three main tasks: reception, selection, and guidance. Furthermore, these tasks were allocated to the robot to perform the service to meet the user by considering the location relationship between robots and between the robots and the user. Using this system, the person was guided to the desired place through the collaboration of multiple robots.

Example of guidance task by robot collaboration

Connection diagram between mobile robots and LDS of the Kukanchi system in the experiment

Demonstration of collaborative service by multiple robots: guidance service
5 Discussion
In the demonstration task, directory enquiries were conducted at the reception robot. The service comprises the following tasks in detail. When a person arrives at the reception desk, a reception robot detects the position of the person (person detection task) and registers the position with the LDS of the Kukanchi system. Further, a task scheduler of the Kukanchi system chooses a robot that can talk, and the chosen robot (among other robots in the space) leaves quickly for the reception desk and directs the guide (robot choice task). A mobile robot expands its coordinate system and leaves for the meeting (wide area traveling task). On the other hand, the reception robot guides the interactive display to be an input to the demands of the places that the user wants to visit. Meanwhile, the mobile robot arrives (service choice task) and registers the place with the LDS from the interactive display (interaction task). When the guidance robot arrives at the reception desk, the robot guides the person to the input destination (guidance task). In the experiment, the exhibition space and robot capabilities were limited and the task was not flexible. For instance, changing the destination of the guidance robot and communication with it in real-time was not possible.
6 Conclusion
We have developed a multiple robot collaboration system using the database and task scheduler of the Kukanchi system. Furthermore, the position information between the user and robots has been added to the task, making the service possible according to the user’s request. We have confirmed the collaboration of robots through a basic experiment providing a guidance service. As future work, we plan to develop the system to cater for multiple users and to realize a more flexible service.
We express our special thanks to Mr. Taiki Endo and Mr. Daiki Nomiyama who developed the system and performed the experiment.
References
Sato, M., Kamei, K., Nishio, S., Hagita, N.: The ubiquitous network robot platform: common platform for continuous daily robotic service. In: IEEE/SICE International Symposium on System Integration, pp. 318–323 (2011)
Kato, Y., Izui, T., Tsuchiya, Y., Narita, M., Ueki, M., Murakawa, Y., Okabayashi, K.: RSi-cloud for integrating robot services with internet services. In: IECON, pp. 2158–2163 (2011)
Ishiguro, Y., Maeda, Y., Trung, N.L., Sakamoto, T., Yoshimi, T., Ando, Y., Mizukawa, M.: Architecture of Kukanchi middleware. In: The 8th International Conference on Ubiquitous Robots and Ambient Intelligence, pp. 23–26 (2011)
RT-Middleware (OpenRTM-aist). http://www.openrtm.org/OpenRTM-aist/html-en/
Maeda, Y., Yoshimi, T., Ando, Y., Mizukawa, M.: Task management of object delivery service in Kukanchi. In: IEEE/SICE International Symposium on System Integration (SII), pp. 283–288 (2012)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Fujimoto, K., Sasaki, T., Sugaya, M., Yoshimi, T., Mizukawa, M., Matsuhira, N. (2016). A Collaborative Task Experiment by Multiple Robots in a Human Environment Using the Kukanchi System. In: Kubota, N., Kiguchi, K., Liu, H., Obo, T. (eds) Intelligent Robotics and Applications. ICIRA 2016. Lecture Notes in Computer Science(), vol 9835. Springer, Cham. https://doi.org/10.1007/978-3-319-43518-3_27
Download citation
DOI: https://doi.org/10.1007/978-3-319-43518-3_27
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-43517-6
Online ISBN: 978-3-319-43518-3
eBook Packages: Computer ScienceComputer Science (R0)