
Zusammenfassung
This chapter describes the concepts of differential global navigation satellite system (GlossaryTerm
DGNSS
) positioning focusing on practical details given that the fundamental concepts have been covered in prior chapters. The chapter starts with a review of the general concepts of DGNSS, including a quantitative discussion on the biases in DGNSS measurements. The next section focusses on code-based DGNSS positioning, presenting an overview of DGNSS services as well as a brief discussion on the format and latency of DGNSS corrections. A significant part of this chapter is devoted to carrier-phase dominated DGNSS, or real-time kinematic (GlossaryTermRTK
) positioning. Besides a theoretical consideration that includes the Russian Global Navigation Satellite System (GlossaryTermGLONASS
) and multi-GNSS RTK, the section provides examples of RTK positioning performance that are obtained in practice. The last section details on network RTK, which is an extension of the standard RTK technique to cover longer distances.Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
- Global Position System
- Global Navigation Satellite System
- Global Navigation Satellite System
- Ambiguity Resolution
- Precise Point Position
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Differential GNSS: Concepts
This section describes and compares the concepts of differential GNSS (DGNSS) positioning. We will address the code (pseudorange)-based DGNSS positioning techniques as well as the more precise carrier-phase-dominated DGNSS positioning techniques. Pseudorange DGNSS remains an important method for obtaining meter level positions, whereas real-time kinematic (RTK) carrier-phase DGNSS receiver systems and correction services are essential tools in surveying and many other fields. Furthermore, network-based approaches to deliver RTK carrier-phase DGNSS services have more recently gained importance.
Before discussing the differential positioning techniques, Sect. 26.1.1 reviews the global navigation satellite system (GlossaryTerm
GNSS
) code and phase observation equations, as they form the basis of the positioning models.1.1 Differential GNSS Observation Equations
Reference is made to the basic (linearized) observation equations as presented in Chapts. 19 and 21, but now with the satellite position vector still assumed as unknown in the observation equations (in Chap. 21 it was assumed that the satellite positions are known, such that they disappear from the linearized positioning model). If, similar to Chap. 21, it is assumed that there are two receivers, a rover (or remote) receiver denoted by r and a reference (pivot or base) receiver denoted by 1, that both track data of satellite s that corresponds to GNSS constellation S at the same frequency j, the between-receiver differenced (linearized) observation equations for pseudorange (code) and carrier-phase read
The following notation is used:
- \(\triangle p_{r,j}^{s}\) :
-
Observed-minus-computed code
- \(\triangle\varphi_{r,j}^{s}\) :
-
Observed-minus-computed phase
- \(\boldsymbol{e}_{r}^{s}\) :
-
Line-of-sight vector of unit length
- \(\triangle\boldsymbol{r}_{1}\) :
-
Incremental pivot receiver position
- \(\triangle\boldsymbol{r}_{1r}\) :
-
Incremental relative receiver position
- \(\triangle\boldsymbol{r}^{s}\) :
-
Incremental satellite position
- \(T_{1r}^{s}\) :
-
Differential tropospheric delay
- \(\mu_{j}^{\mathrm{S}}\) :
-
Ionospheric coefficient for j-th freq.
- \(I_{1r}^{s}\) :
-
Differential ionospheric delay
- c :
-
Velocity of light
- dt 1r :
-
Differential receiver clock
- \(d_{1r,j}^{\mathrm{S}}\) :
-
Differential receiver code bias
- \(\delta_{1r,j}^{\mathrm{S}}\) :
-
Differential receiver phase bias
- \(\Updelta d_{1r,j}^{s}\) :
-
Differential code interchannel bias
- \(\Updelta\delta_{1r,j}^{s}\) :
-
Differential phase interchannel bias
- \(\lambda_{j}^{\mathrm{S}}\) :
-
Wavelength for frequency j
- \(N_{1r,j}^{s}\) :
-
Differential carrier-phase ambiguity
- \(e_{1r,j}^{s}\) :
-
Differential code noise
- \(\varepsilon_{1r,j}^{s}\) :
-
Differential phase noise.
Note that \((\cdot)^{\top}\) denotes the transpose of a matrix or vector. The between-receiver differencing has eliminated the satellite clock as well as satellite hardware biases from the observation equations. Compared to the undifferenced observation equations, all other parameters are changed to their between-receiver differential counterparts. Similar to Chap. 21, the between-receiver differenced observables and parameters are denoted by \((\cdot)_{1{r}}=(\cdot)_{r}-(\cdot)_{1}\). Note that besides the (incremental) satellite position vector (i. e., \(\triangle\boldsymbol{r}^{s}\)), also the (incremental) position vector of the reference receiver 1 (i. e., \(\triangle\boldsymbol{r}_{1}\)) is maintained in the differential observation equations (instead of assuming it as known). The reason for this is as to evaluate the impact of errors in either one of them on the differential observation equations (Knowing the satellite positions as well as the pivot receiver position implies that \(\triangle\boldsymbol{r}^{s}=0\), as well as \(\triangle\boldsymbol{r}_{1}=0\) (Sect. 26.1.2). If the position of the reference receiver is only approximately known, using DGNSS precise position differences between reference and rover (also referred to as baseline coordinates), denoted by \(\boldsymbol{r}_{1{r}}\), are estimated.
An alternative approach for DGNSS is that instead of forming differences of observations between rover and pivot receivers, pseudorange corrections and/or phase-range corrections (Chap. 21) are formed based on the data of the pivot receiver. These differential corrections are then transmitted to the rover receiver to correct its observations.
Finally, we remark that the differential interchannel (or interfrequency) biases in (26.1), that is, \(\Updelta d_{1r,j}^{s}\) and \(\Updelta\delta_{1r,j}^{s}\), only appear in case of GLONASS (frequency division multiple access (GlossaryTerm
FDMA
)) observations. These interchannel biases (ICBs) exist as each GLONASS signal transmits on its own frequency channel (Chap. 8). In case of code division multiple access (GlossaryTermCDMA
) signals these interchannel biases are absent.1.2 Differential GNSS Biases
The main motivation for the development of differential positioning techniques was the presence of Selective Availability (GlossaryTerm
SA
) on Global Positioning System (GlossaryTermGPS
) signals. SA was implemented to deliberately degrade the GPS positioning performance after it was discovered that single point positioning (GlossaryTermSPP
) based on the civil C/A-code performed better than originally expected [26.1]. SA implied that the GPS broadcast ephemerides were manipulated and the satellite clock stability was degraded (dithering) by the U.S. government [26.2]. This had as consequence that the accuracy of C/A-code-based SPP (i. e., the GPS standard positioning service) was only about 100 m. SA has been turned off since 2 May 2000, resulting in a SPP accuracy of about 10 m, an improvement of a factor 10. As an illustration, Fig. 26.1 shows the position errors obtained using SPP for an Australian international GNSS service (GlossaryTermIGS
) station (YAR1) during the first 8.3 h of 2 May 2000. From the graphs it can be directly seen that after SA was turned off at about 04:07 UTC, the position accuracy improved tremendously.

East (a), north (b), and up (c) position errors of station YAR1 (Western Australia) obtained with single point positioning during the first 8.3 h Coordinated Universal Time (UTC ) of 2 May 2000. The effect of turning off Selective Availability at about 04:07 UTC (epoch 480 in the graphs) is clearly visible
Although the main motivation for the development of differential techniques was to eliminate the effects of SA, DGNSS has remained a very important positioning method after SA was turned off, because of its elimination and reduction of biases. Besides the elimination of the satellite clock and hardware biases, biases due to orbit and atmospheric are significantly reduced, based on their spatial correlation. The remainder of this section provides a quantitative assessment of the different types of DGNSS biases.
1.2.1 Satellite and Pivot Receiver Position Biases
The satellite position as well as the position of the pivot receiver are multiplied by the differential line-of-sight vector \(\boldsymbol{e}_{1{r}}^{s}\) in the observation equations (26.1 ). The effect of a bias in either the satellite position or pivot receiver position can be evaluated as follows. Recall (21.84) in Chap. 21, which gives a rule-of-thumb for the impact of a bias in the satellite position on the relative baseline
Here \(\|\boldsymbol{r}_{1{r}}\|\) denotes the baseline length between reference and rover receivers, \(\|\boldsymbol{r}^{s}-\boldsymbol{r}_{r}\|\) is the distance between receiver and satellite and \(\|\triangle\boldsymbol{r}^{s}\|\) the size of the bias in the satellite position. The impact of a bias in the position of the pivot receiver, denoted by \(\|\triangle\boldsymbol{r}_{1}\|\), is upper bounded in a similar manner
The accuracy of broadcast GPS ephemerides is about 1 m. Using the above rule-of-thumb, this has an effect of \({\mathrm{1000}}\,{\mathrm{mm}}/{\mathrm{20000}}\,{\mathrm{km}}={\mathrm{0.05}}\,{\mathrm{ppm}}\) of the baseline length. For a baseline of 1000 km, the bias is then 5 cm. The accuracy of precise GPS ephemerides is better than 5 cm (Chap. 33), resulting in a bias of \({\mathrm{50}}\,{\mathrm{mm}}/{\mathrm{20000}}\,{\mathrm{km}}={\mathrm{0.0025}}\,{\mathrm{ppm}}\) of the baseline length. This 5 cm bias only has an effect of 2.5 mm for a 1000 km baseline. Figure 26.2 a shows the bias in the baseline as a function of the bias in either satellite position or pivot receiver position for four baseline lengths. From this figure, it can be inferred that biases in satellite position and/or pivot receiver position get drastically reduced in the between-receiver differenced observation equations.


(a) Baseline length bias as a function of a bias in satellite position or pivot receiver position for four baseline lengths. (b) Geometry of a single-layer ionosphere model in relation to the between-receiver difference for stations 1 and r
The fact that the coordinates of the pivot or reference receiver need not be accurate for the differential solution to be precise means that DGNSS can be accomplished by setting the pivot receiver coordinates to any reasonably valid position solution. This fact allows for moving reference station DGNSS which has applications in navigation, specifically in vehicle-to-vehicle relative navigation and also in terrestrial or space formation flying. In such applications, the absolute location of the rover is not required, rather the relative location of two moving vehicles is of interest.
1.2.2 Differential Ionospheric Biases
As the ionospheric delays are spatially correlated, the between-receiver differenced ionospheric bias is much less than its absolute counterparts. To get insight into the size of this differential ionospheric bias, we make use of a simple mapping of the (slant) ionospheric delays to the vertical ionospheric delays at a representative height of the ionosphere above the Earth’s surface (Chap. 19)
Here Iv denotes the vertical ionospheric delay at height hion of the ionospheric layer, \(z_{r}^{s}\) the zenith angle at the receiver, \({z_{r}^{s}}^{\prime}\) the zenith angle at the ionospheric layer, and \(R_{\oplus}\) the Earth’s radius. Figure 26.2b depicts the geometry of this single-layer ionosphere in relation to the between-receiver difference.
The vertical ionospheric delay at the ionospheric point of receiver r is, in principle, different from the vertical delay of receiver 1, due to the existence of horizontal gradients in the ionosphere. If it is assumed that the vertical delay of receiver r is equal to
where \({\partial I_{\mathrm{v}}}/{\partial l}\) denotes the horizontal gradient and \(l_{1r}^{s}\) the baseline length at the ionospheric single layer (Fig. 26.2b), the between-receiver ionospheric bias can be decomposed as follows
Figure 26.3 now plots for different baselines, varying from 10 to 400 km, the functions \((1/\cos{z_{1}^{s}}^{\prime}-1/\cos{z_{r}^{s}}^{\prime})\) as well as \(l_{1r}^{s}/\cos{{z_{r}^{s}}}^{\prime}\) as a function of the zenith angle at receiver 1 (\(z_{1}^{s}\)). For these graphs, the height of the ionospheric layer was set to \(h_{\text{ion}}={\mathrm{350}}\,{\mathrm{km}}\). Besides that the graphs show that these functions become larger with increasing baseline length, it can be seen that for all baselines they reach a maximum around a zenith angle of \(z_{1}^{s}\approx{\mathrm{75}}^{\circ}\). This also means that their combination in (26.5) and thus the differential ionospheric bias is maximized at this zenith angle. Furthermore, from Fig. 26.3 follows that at this zenith angle \((1/\cos{z_{1}^{s}}^{\prime}-1/\cos{z_{r}^{s}}^{\prime})\) is about 0.6 ppm of the baseline length l1r, whereas \(l_{1{r}}^{s}/\cos{{z_{r}}^{s}}^{\prime}\) is about 1.5 ppm of the baseline length l1r.


(a) Amplification of \(I_{\mathrm{v}}={\mathrm{1}}\,{\mathrm{m}}\) into \(I_{1r}^{s}\); (b) amplification of \(\frac{\partial I_{\mathrm{v}}}{\partial l}={\mathrm{1}}\,{\mathrm{ppm}}\) into \(I_{1{r}}^{s}\), for different baseline lengths
Using these values for a zenith angle of 75 ° (this corresponds to an elevation of 15 °), the size of the differential ionospheric bias is assessed based on worst-case choices for the vertical delay Iv and the horizontal gradient \({\partial I_{\mathrm{v}}}/{\partial l}\). These choices, which are given in Table 26.1, apply to levels for the vertical total electron content (GlossaryTerm
VTEC
) that can be reached during the daytime in either solar minimum or solar maximum years, as the ionospheric activity is clearly correlated with the progression of the 11-yearly solar cycle. These VTEC values have been converted from total electron content (GlossaryTermTEC
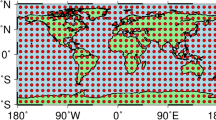
) unit to the ionospheric delay at the GPS L1 frequency in meters. Difference is made in levels that apply to mid-latitude regions and equatorial regions, as the levels around the equator are normally much higher than at mid-latitudes. Levels for polar regions are not included in the table, as they vary more or less in between the mid-latitude and equatorial levels. The equatorial vertical delay levels in Table 26.1 are confirmed by [26.3, 26.4], whereas the mid-latitude levels are confirmed by, among others, [26.5, 26.6]. Concerning the horizontal gradients, the normal east–west gradient due to the diurnal cycle of the ionosphere is about 1 ppm. So, during solar minimum years they are not much larger than this; in Table 26.1 we have assumed 2 ppm for both mid-latitude and equatorial regions. Much larger gradients are usually observed close to solar maximum: whereas horizontal gradients at mid-latitudes can range up to 10 ppm [26.7], very large (north–south) gradients of almost 50 ppm have been reported by [26.8, 26.9] for the equatorial anomaly regions, occurring post sunset.Using the values of Table 26.1, the differential ionospheric bias is calculated using (26.5) for a zenith angle at the reference receiver of 75 °. Table 26.2 presents the absolute value of this differential ionospheric bias, in ppm of the baseline length. From this table, it follows that the size of the differential ionospheric bias varies significantly, in the sense of depending on the location on Earth as well as in what stage of the solar cycle the GNSS measurements are collected. The lowest values are obtained during solar minimum at mid-latitudes (1 ppm), whereas the highest values (62 ppm) apply to solar maximum at equatorial regions.
Depending on the positioning application at hand, these differential ionospheric bias levels put restrictions to the maximum baseline length for which they can be neglected. For carrier-phase-based DGNSS positioning, requiring the highest positioning accuracy (Sect. 26.3), the differential ionospheric biases are allowed to be only a few centimeters in order to neglect them. For example, if it is required that \(|I_{1{r}}^{s}|\leq\) 2.5 cm; based on Table 26.2 the baseline length may be up to 25 km during solar minimum at mid-latitudes. However, this is only about 0.5 km during solar maximum for baselines that are measured in equatorial regions. For code-based DGNSS applications that require a much lower positioning accuracy (Sect. 26.2), the differential ionospheric biases can be ignored for much longer baselines.
1.2.3 Differential Tropospheric Biases
The tropospheric bias is normally decomposed into a hydrostatic plus a wet component (Chap. 6). The hydrostatic delay, which equals about 90 % of the tropospheric bias, can be predicted very well based on the surface’s air pressure. The wet component (accounting for about 10 %) is caused by atmospheric water vapor and is more variable and therefore harder to predict. Usually the hydrostatic component is corrected using an a priori model, whereas the wet component is estimated as unknown parameter in the processing after having it mapped to local zenith.
We may get an impression of the size of the zenith tropospheric bias by using Saastamoinen’s troposphere model [26.10]. Mapping both hydrostatic and wet delays to local zenith, the zenith hydrostatic delay, denoted by \(T_{\mathrm{h}}^{\mathrm{z}}\) and zenith wet delay, denoted by \(T_{\mathrm{w}}^{\mathrm{z}}\), can be calculated as
with the constant \(B={\mathrm{0.002277}}\,{\mathrm{m/mbar}}\). Here p denotes the air pressure (mbar), T the temperature (K) and e the partial pressure of water vapor (mbar) at the Earth’s surface. This partial pressure can be computed as follows [26.11]
Here rh denotes the relative humidity (0 ≤ rh ≤ 1) and esat the partial pressure of saturated air, which can be modeled as an exponential function of the (inverse) temperature. This function, for which its constants a and b are taken from [26.12], is plotted in Fig. 26.4a for the temperature ranging between 230 and 310 K.


(a) Partial pressure of saturated air as a function of temperature; (b) differential tropospheric mapping function as a function of baseline lengths ranging from 10–400 km
According to the above functions, Table 26.3 presents the calculated values for the hydrostatic, wet, and total delay in zenith for two types of tropospheric conditions, that is, cold and dry as well as hot and humid. Under these two extreme atmospheric conditions, from Table 26.3 it follows that the difference in (total) zenith delay can be almost 1 m. Note that the hot and humid values of about 2.4 m for the zenith hydrostatic delay and about 0.8m for the zenith wet delay are maximum values that can be reached [26.13].
To assess the size of the differential tropospheric bias, the reference receiver is assumed to experience the tropospheric conditions as in Table 26.3 . For the troposphere at the rover receiver, it is first assumed that it is at another height, as it is well known that both temperature and pressure in the lower part of the atmosphere decreases with altitude. The temperature and pressure at height H (km) can be assessed as follows, based on a constant temperature lapse rate of 6.5 K/km [26.11]
where T0 and p0 denote the temperature and pressure at H = 0, respectively. For a (rover) receiver that is 1000 m higher than the receiver in Table 26.3, Table 26.4 presents the tropospheric zenith delays under the two extreme conditions, where it is assumed that relative humidities are same. Besides a difference in height, tropospheric biases between receivers may also experience differences due to horizontal gradients, which may occur as a result of (cold) weather fronts. Therefore, we also consider a rover receiver that is at the same height as the reference receiver, but experiences a temperature and pressure that are 10 K and 10 mbar, respectively, lower than at the reference receiver. Table 26.5 presents the calculated zenith tropospheric delays for this rover receiver (again assuming the same relative humidities).
Based on these examples, we can now assess the size of the differential (slant) tropospheric bias between reference and rover receivers. For this purpose, the wet delay is mapped to zenith using a simple \(1/\cos z\) mapping function, such that it is possible to decompose the between-receiver tropospheric bias as follows
Here \(T_{1}^{\mathrm{z}}\) and \(T_{r}^{\mathrm{z}}\) denote the zenith tropospheric delay at receivers 1 and r, respectively. Similar to the differential ionospheric bias, the differential tropospheric bias shows a dependence on the length of the baseline through factor \((1/\cos z_{1}^{s}-1/\cos z_{r}^{s})\). This factor is plotted for several baseline lengths in Fig. 26.4b. In contrast to the ionospheric factor (Fig. 26.3a), this tropospheric factor does not have a maximum for a certain zenith angle; it is rapidly increasing for high zenith angles or low elevations. For the assessment of the differential tropospheric biases, we therefore assume that there is a cut-off zenith angle of 75 °, above which the data are not used. For this cut-off angle, Table 26.6 shows the magnitude of the differential tropospheric biases that can be expected for the examples. It is assumed that the baseline length is 100 km. Besides the results for the baseline for which the rover is 1000 m higher than the reference and the baseline that experiences a cold front, results are included for a baseline for which the atmospheric conditions at both receivers are the same. For such a baseline, the differential tropospheric biases are only a result of the fact that both receivers see the satellite at different elevations.
In addition to the total differential tropospheric bias, Table 26.6 also gives the differential zenith wet delays, which give an impression of the amount of remaining bias after application of an a priori troposphere model. From the table follows that the size of the total differential tropospheric biases varies between 0.54 m (identical cold and dry conditions for both receivers) and 2.70 m (hot and humid conditions and a height difference of 1 km between both receivers). This corresponds to 5–27 ppm of the baseline length. After a priori correction, the remaining differential biases are much smaller, although for the hot and humid conditions they cannot be neglected for this 100 km baseline and need to be estimated. For the cold and dry conditions as well as sufficiently short baselines they can be ignored.
1.2.4 Receiver Noise, Multipath, and Other Biases
Biases that are not reduced or cancelled in between-receiver differential GNSS, as they are not spatially correlated, are first of all differential receiver clocks and differential receiver hardware biases. For the carrier-phase observations, this also includes the differential ambiguities. Hence, these biases need to be estimated as unknown parameters.
Biases that remain are unmodeled biases , due to for example, ionospheric scintillations, radio interferences, multipath, signal scattering, signal attenuation, and diffraction [26.14]. Of these additional biases, multipath biases (Chap. 15) are most likely to dominate. Multipath affects both code and phase measurements, but for phase data the multipath bias is generally 100 times smaller (centimeter level) than for code data (meter level) [26.15]. Multipath is a highly localized phenomenon and cannot be removed by the differential positioning approach; any multipath experienced by the reference receiver will be directly passed to the rover receiver. To mitigate this, the reference station location must be carefully chosen and a multipath mitigating receiver and antenna should be used. The use of multiple reference stations at different locations to average out multipath contributed to the development of wide-area DGPS services (WADGPS) [26.16], (Sect. 26.2).
Finally, random receiver noise is not cancelled when forming differential GNSS measurements. Although receiver noise depends on the type of make of receiver and antenna [26.17], we find some theoretical lower bounds on the precision of high-end geodetic GPS receivers in [26.14]: 1 dm for code observations and 0.1 mm for phase observations. In practice, these values are however larger, as unmodeled biases cannot be separated from receiver noise. For GPS phase data, the precision is at the level of a few millimeters, whereas for GPS code data this is a few decimeters (for high-end receivers, [26.18]). It has been initially demonstrated that the receiver noise of newer signals (e. g., GPS L5) or of new constellations (Galileo, BeiDou navigation satellite system (GlossaryTerm
BDS
)) is lower than of the GPS L1 and L2 signals [26.19, 26.20, 26.21, 26.22].2 Differential Navigation Services
In this section, code-based DGNSS is discussed. First, Sect. 26.2.1 describes the DGNSS implementations that exist in practice, followed by an overview of DGNSS services in Sect. 26.2.2. Section 26.2.3 focusses on the message format that is used for transmitting the DGNSS corrections to users, whereas Sect. 26.2.4 discusses the issues due to the difference in time between the generation of the DGNSS corrections and the time they are applied by users (i. e., latency).
2.1 DGNSS Implementations
The principle of DGNSS is visualized in Fig. 26.5. A GNSS reference receiver that is stationed at a known location tracks data of all satellites in view and determines differential (DGNSS) corrections that are transmitted (in real time) to users (rover receivers) that track GNSS data at a certain distance of the reference station. These users correct their data allowing them to improve their positioning accuracy compared to a SPP solution.


(a) Local DGNSS, based on a single reference station, where the corrections to the rover are sent by a ground-based antenna, vs. (b) Wide-area DGNSS, based on a network of reference stations, with the corrections transmitted via a satellite
If the corrections are determined based on the data of a single reference station (Fig. 26.5 a), the technique is referred to as local DGNSS [26.23]. The rover receiver is usually of the single-frequency type (GPS: L1). The maximum distance the rover receiver is allowed to be is about 1000 km, as to have sufficient satellites in common between rover and reference. Because of the distance-dependent biases (atmosphere, orbit), the position accuracy of local DGPS is restricted to 1–10 ppm [26.24]. For a distance of 1000 km, the position accuracy is then about 10 m, which corresponds to the accuracy of SPP, so it does not make sense to cover larger distances. The position accuracy can be improved if DGNSS is based on a whole network of reference stations, instead a single reference station (Fig. 26.5 b). All reference stations, equipped with dual-frequency or multifrequency receivers at known locations, send their data to a central processing facility which generates DGNSS corrections that are valid for the region the network covers. This is the wide-area DGNSS (WADGNSS) technique. WADGNSS has the following advantages over local DGNSS [26.25]:
-
A network covers an effective area that is larger than based on a single reference station.
-
Differential corrections are consistent within the area covered by the network, whilst based on different single reference stations discrepancies may show up.
-
A network is able to calculate models for distance-dependent biases (atmospheric errors, orbits) that are valid over the coverage area, while this is not possible based on a single reference station.
Note that the above advantages also apply to network RTK as compared to single reference RTK (Sect. 26.4). By using a network of reference stations, the coverage area of DGNSS can span the size of the United States or Europe, or even the world. The positioning accuracy of (code-only) WADGPS has been reported to be within 5 m [26.26]. Higher, even submeter accuracies are feasible for WADGPS, when the code data are smoothed with carrier-phase data [26.27]. The combined use of code with carrier-phase then makes WADGNSS conceptually equivalent to precise point positioning (GlossaryTerm
PPP
) (Chap. 25).The positioning accuracy of local (single-frequency) DGNSS can be improved by a priori reducing the differential ionospheric biases by means of an ionosphere model of which its coefficients are broadcast in the navigation message. In case of GPS or BDS this is the Klobuchar model [26.28, 26.29], whereas for Galileo this is the semiempirical NeQuick model , which is based on the algorithm proposed by [26.30]. These models correct for some part of the differential ionospheric biases, but not completely. The Klobuchar model claims to remove 50–80 % of the magnitude of the ionospheric bias [26.31], while it has been initially demonstrated that the NeQuick model performs better than Klobuchar [26.32]. Differential tropospheric biases should be a priori corrected for using standard models, for example, the Saastamoinen model [26.10] or the empirical global pressure and temperature (GlossaryTerm
GPT
) model [26.33].2.2 DGNSS Services
2.2.1 DGNSS: Marine and Terrestrial Applications
By far the largest present application of DGNSS is in the marine transport sector. This is primarily because during the 1990s, the coast guards and lighthouse authorities of several maritime nations deployed extensive networks of reference stations providing differential corrections to mitigate the effects of SA on GPS. Almost immediately after the implementation of SA by the U.S. Air Force, the U.S. Federal Aviation Adminstration, and the U.S. Coast Guard began to make plans to correct for SA using differential techniques. This resulted in the U.S. nationwide DGPS (NDGPS) system that is jointly operated by the U.S. Coast Guard and the U.S. Department of Transportation [26.34]. The NDGPS network (operational since 1999) initially made use of existing marine radio beacons as a method for transmitting differential corrections to users and originally only covered coastal areas. Later on also reference stations were deployed at inland locations, such that the whole U.S. is covered by the NDGPS network. In 2016 it was decided to maintain coverage in maritime and coastal regions only [26.35], due to the growth of other Continuously Operating Reference Station (CORS) networks inland.
2.2.2 DGNSS Service Providers: GBAS or SBAS
On the transmission of the DGNSS corrections, one can distinguish between DGNSS services that broadcast the differential corrections through terrestrial messages, such as the U.S. NDGPS, or systems that broadcast these messages using (geostationary or geosynchronous) satellites. The first type of systems are referred to as ground-based augmentation systems (GlossaryTerm
GBAS
) (Chap. 31), whereas those of the second type are satellite-based augmentation systems (GlossaryTermSBAS
) (Chap. 12). The transmission through satellites has the advantage that a larger area can be covered compared to the transmission by means of terrestrial links.Examples of governmental GBAS- and SBAS-based DGNSS services can be found in Table 26.7, which provides an overview of some (but not all) DGNSS service providers. Although this table only mentions a few countries that provide a nationwide DGNSS service, many countries actually have their governmental DGNSS services, covering both coastal (offshore) and/or inland (onshore).
Note that the governmental Wide Area Augmentation System (GlossaryTerm
WAAS
), European Geostationary Navigation Overlay Service (GlossaryTermEGNOS
), Multi-Function Satellite Augmentation System (GlossaryTermMSAS
), and GPS Aided Geo Augmented Navigation (GlossaryTermGAGAN
) systems are all of the SBAS type which are discussed in Chap. 12. Although the MSAS and Quasi-Zenith Satellite System (GlossaryTermQZSS
) are both Japanese systems, they differ in the types of services they offer: whereas MSAS is a WAAS or EGNOS compatible system that provides corrections to augment single-frequency code-based positioning, QZSS provides corrections to augment positioning (including high-accuracy carrier-phase-based positioning) in the densely built Japanese urban regions (Chap. 11). The local area augmentation system (LAAS), which is used for the precision approach and landing of aircraft (Chap. 31), is of the GBAS type as it uses a very high frequency (GlossaryTermVHF
) radio link for the transmission of DGPS corrections.In addition to these governmental services, commercial service providers exist that operate on a global scale (Table 26.7). Commercial DGNSS systems are either of the GBAS or the SBAS type. Nowadays, these commercial providers offer not only code-based DGPS services, but also multi-GNSS (GPS+GLONASS+BDS+Galileo+QZSS) code and carrier-based PPP and PPP-RTK as well as network-RTK services, yielding higher positioning accuracies. These services are not included in Table 26.7, as the table is restricted to DGPS based on code data only. The positioning accuracies that are claimed by the DGNSS code-based service providers are all in the same range: about 1–3 m, although some (commercial) providers claim submeter positioning accuracy.
Next to the correction message, many governmental/commercial DGNSS systems provide a form of integrity message to alert the users of a potential fault in either the corrections or the GNSS signals themselves. More details on the integrity monitoring of GNSS signals can be found in Chap. 24.
2.3 Data Communication: RTCM Message
The data communication link is essential for the (real-time) transmission of the DGNSS corrections to users. Most DGNSS service providers use a standardized format that is defined and published by the Radio Technical Commission for Maritime Services Special Committee 104 (GlossaryTerm
RTCM
SC-104) (Annex A). Initially, RTCM corrections were defined only for pseudorange differential GPS (version 2.0) as this is all that is required to provide a marine DGPS service. Support for carrier-phase GPS measurements was added in version 2.1, GLONASS support was included in version 2.2, and modernized data structures, increased bandwidth efficiency and support network RTK was implemented with version 3.0. Versions 2.3 and 3.2 are current though the standards continue to evolve to meet user needs. Both versions 2.3 and 3.2 define message formats for transmitting station information, pseudorange and range-rate corrections (Sect. 26.2.4) as well as carrier-phase raw data and carrier-phase corrections for GPS and GLONASS. Version 3.2 provides additional support, through multiple signals messages, for most of the emerging GNSSs as well as support for various formats of network RTK and PPP corrections [26.36].While SBAS systems deploy (communication) satellites as link for the communication of the RTCM corrections, for GBAS systems there are several communication links in use:
-
Radio communication (VHF/High frequency (HF); Frequency Modulation (FM) Radio Data Service (RDS))
-
Mobile communication (Global System for Mobile Communication (GSM), General Packet Radio Service (GPRS), Universal Mobile Telecommunication System (UMTS))
-
Internet communication (NTRIP).
Note that GPRS makes use of a combination of Internet and mobile telephone (GSM), whereas UMTS is the successor of GPRS. Of specific interest is the networked transport of RTCM via Internet protocol (NTRIP) for the streaming of DGNSS data which was developed by the German Federal Agency for Cartography and Geodesy (BKG) in 2004 [26.37]. The standard has been adopted by most receiver manufacturers allowing RTCM corrections to be broadcast over the Internet.
2.4 Latency of DGNSS Corrections
Users of DGNSS would like to have their corrections corresponding to the same time as the time at which they collect their measurements, in order to compute a differential solution with the best possible accuracy. In practice, however, there may be some delay or latency before the corrections arrive at the user. In addition, the reference station (or the network) may only transmit corrections at a certain time interval (i. e., the update rate ), which may not correspond with the data sampling rate of the user.
To deal with this latency problem and to provide corrections that can be applied during the time before a new set of corrections arrives, the RTCM protocol uses a first-order polynomial to predict the DGNSS corrections, based on the rate of these DGNSS corrections, the so-called range-rate corrections
Here t0 denotes the time instant the pseudorange corrections (GlossaryTerm
PRC
) are determined at the reference station and t the time instant corresponding to the measurements of the user, such that their difference \(t-t_{0}\) is the latency. The range-rate corrections are denoted by range-rate correction (GlossaryTermRRC
) and these are also part of the RTCM correction message, next to the pseudorange corrections. It will be clear that the acceptable latency depends on the application at hand and the DGNSS position accuracy that is required.Before SA was turned off, the DGPS pseudorange corrections varied much more in time than after it was removed. With SA on, the RRCs were useful in reducing the update rate of the DGPS corrections. However, with SA turned off, the temporal variations in the pseudorange corrections are predominantly governed by the temporal variations in the atmospheric and orbit errors. Hence, as the RRCs vary very slowly and are almost zero, some authors propose not to use it anymore as it may deteriorate the DGPS position accuracy [26.38].
Even if the update rate of the DGNSS corrections is high, there is always some latency due to the communication link that is used to transmit them to the users. For example, a DGPS RTCM data stream as broadcast by the EUREF station in Brussels to a user in Frankfurt via the NTRIP caster, resulted in latencies of up to one second for transmission through the Internet. Using GPRS, that is, a combination of mobile phone and the Internet, the latencies were at most two seconds [26.39].
3 Real-Time Kinematic Positioning
This section discusses the aspects of carrier-phase-dominated DGNSS positioning and in particular the RTK positioning technique that relies on resolving the carrier-phase ambiguities to estimate the receiver position with a high precision. Before RTK is discussed, Sect. 26.3.1 reviews the double-differenced observation equations underlying the carrier-phase and code-based positioning model. As the receiver-satellite geometry has a drastic impact on the precision of the estimated carrier-phase ambiguities and position coordinates, Sect. 26.3.2 is devoted to this and relates it to the development of carrier-phase-based positioning techniques from a historical point of view, starting from conventional static GNSS to RTK positioning. The last three subsections are all devoted to RTK. Section 26.3.3 discusses intricacies that occur when GLONASS data are used for RTK, whereas Sect. 26.3.4 addresses aspects that are relevant to multi-GNSS RTK positioning, including intersystem biases and inter-satellite-type biases. Finally, Sect. 26.3.5 presents examples of the performance of RTK ambiguity resolution and positioning.
3.1 Double-Differenced Positioning Model
When carrier-phase observations are included in the positioning model, the system of between-receiver differenced observation equations (26.1) cannot be used directly. As with DGNSS based on the code data, it is first assumed that the satellite positions are known (\(\triangle\boldsymbol{r}^{s}=0\)). Also the position of the receiver position is usually assumed to be known (\(\triangle\boldsymbol{r}_{1}=0\)), although this is strictly not required.
Having done so, the system can still not be solved in a unique way, as it is rank-deficient (Chap. 22), because the columns of the design matrix between the differential receiver phase biases and differential ambiguities are linear dependent. To overcome this rank deficiency, one of the satellites has to be selected as pivot satellite . Alternatively, the rank deficiency between receiver phase biases and ambiguities can be eliminated by differencing the between-receiver differenced observations with respect to those of this pivot satellite. As discussed in Chap. 21, this then leads to the double-differenced (linearized) observation equations for pseudorange and carrier-phase
The double-differenced observables and parameters are denoted by \((\cdot)^{1s}=(\cdot)^{s}-(\cdot)^{1}\), with satellite 1 selected as pivot. For sufficiently short baselines, it is usually allowed to ignore the double-differenced tropospheric and ionospheric delays (Sect. 26.1.2). If they cannot be neglected, a common procedure for the tropospheric delays is to correct the observations using an a-priori troposphere model and map the residual delays to local zenith, and this zenith troposphere delay (GlossaryTerm
ZTD
) is estimated as an unknown parameter. If the double-differenced ionospheric delays cannot be ignored as well, they are estimated as unknown parameters, together with the other parameters (Chap. 21).3.2 Carrier-Phase-Based Positioning Methods
The carrier-phase observations have millimeter precision. However, high (millimeter to centimeter) precision for the position parameters can unfortunately not be attained directly, which is due the presence of the unknown carrier-phase ambiguities, even when the differential atmospheric parameters can be ignored. In order to solve both position and ambiguities with high precision, one needs a long observation time (can be more than half an hour), which is due to the receiver-satellite geometry that changes only slowly, as GNSS satellites are in a very high altitude orbit with respect to an Earth-bound receiver.
Using a short-time span, the position and ambiguity precision is predominantly governed by the precision of the pseudorange data, which is at the level of a few decimeters for geodetic receivers. In the limiting case, with a single epoch of data, the position solution is fully determined by the pseudorange data, as the phase data are all needed to solve the ambiguity parameters. In the presence of multiple epochs of data, the phase data start to contribute to the position/ambiguity solution. However within a short-time span this contribution is only marginal, which can be understood as follows, following the reasoning provided in [26.25].
3.2.1 Conventional Static Positioning
Consider the following system of linearized observation equations for double-differenced phase data only of m satellites collected by a stationary receiver during k observation epochs
In the above system, \(\boldsymbol{y}(t_{i})\) denotes a \(f(m-1)\) vector that contains the m − 1 double-differenced phase observations for each of the f frequencies at epoch i, x denotes the vector of relative coordinate components and \(\boldsymbol{\nabla}\) the vector of \(f(m-1)\) carrier-phase ambiguities. The receiver-satellite geometry, as contained in the line-of-sight vectors at epoch i, is captured by \(f(m-1)\times 3\) matrix \(\mathbf{A}(t_{i})\). Thus, for one frequency
Matrix I denotes the identity matrix of dimension \(f(m-1)\).
Note that the carrier-phase ambiguities are parameterized as multiplied by their wavelengths (so they are expressed in meters rather than cycles). These ambiguities do not have a time index, as they are constant in time, as long as no cycle slips occur. A cycle slip causes a jump of the ambiguity, but this jump (which equals an integer multiple of wavelengths) can be detected by application of the standard hypothesis testing theory ([26.40, 26.41] and Chap. 24). Having detected a cycle slip, the corresponding ambiguity parameter is adapted for it, such that the time-constancy of the ambiguity is not violated.
If the time that is spanned by the epochs 1 to k is short (e. g., a few minutes), the receiver-satellite geometry will only change slowly, as the line-of-sight vectors will not be very different from one epoch to another. In this case, \(\mathbf{A}(t_{1})\approx\mathbf{A}(t_{2})\approx\cdots\approx\mathbf{A}(t_{k})\). In the limiting case, if the receiver-satellite geometry is assumed to be stationary, that is, \(\mathbf{A}(t_{1})=\mathbf{A}(t_{2})=\cdots=\mathbf{A}(t_{k})\), the system of observation equations (26.12) is rank deficient, as the columns of the design matrix between position and ambiguities are linear dependent. Although, in practice, the receiver-satellite geometry is not stationary (except for geostationary satellites from e. g., BDS), the slow change of it has as consequence that both position and ambiguities are only poorly estimable. Hence, in order to be able to estimate x and \(\boldsymbol{\nabla}\) with sufficient precision, one will have to make sure that the receiver-satellite geometry has changed significantly, such that \(\mathbf{A}(t_{1})\neq\mathbf{A}(t_{k})\). Using the conventional static GPS surveying technique [26.42, 26.43] it takes typically 20–30 min for short baselines (ignoring differential ionospheric delays), but it could take several (1–3) hours for long baselines (parameterizing the differential ionospheric delays as unknown parameters) [26.25].
3.2.2 Semikinematic Positioning
As the conventional static positioning technique is not very attractive in terms of productivity due to its long observation times, several positioning techniques have been proposed in the past to reduce the observation time that is needed to solve the position (and ambiguities) with sufficient precision [26.44, 26.45].
Three variants of these semikinematic positioning techniques are discussed here (Fig. 26.6):
-
1.
With revisiting of stations [26.46]
-
2.
Starting from a known baseline
-
3.
With antenna swap.
All the three methods are based on the assumption that the rover receiver is allowed to collect data for a short time (e. g., a few minutes) at one point and then visits another point to collect data for only a short time as well. In this way, the productivity can be increased compared to static positioning. Instead of model (26.12), these semikinematic methods are based on the following model
Here \(\boldsymbol{x}(t_{i})\) denotes the relative position vector at epoch i. Thus, provided that the area that is covered is of small scale, the rover receiver collects data during a short time at each point, continuously tracking the satellites when moving between the points.


Semikinematic relative positioning strategies: (a) with revisiting of stations; (b) starting from a known baseline; (c) with antenna swap
3.2.2.1 With Revisiting of Stations
With conventional static positioning, it is not so much the number of epochs but the change of geometry that contributes to the determination of the phase ambiguities. Hence, one can suffice with two periods of data collection at the same point in static mode, where these two periods are separated by a sufficient long time interval (e. g., 30 min if the distance between reference and rover is short). During this time interval, the rover receiver can visit other points. In Table 26.8, the model corresponding to this revisiting stations semikinematic positioning technique is presented, where it is assumed that the first point is observed for a short time at both the start and end of the session, such that the geometry has changed considerably, that is, \(\mathbf{A}(t_{1})\neq\mathbf{A}(t_{k})\).
3.2.2.2 Starting from a Known Baseline
Another variant of semikinematic positioning requires two points with precisely known coordinates, at which the reference and rover receivers are placed at the first epoch. As the relative position is known, the ambiguities can be quickly determined with very high precision. After this initialization, the rover receiver is moved to a next point for quick position determination, thereby continuously tracking the signals. The model corresponding to this technique is given in Table 26.8, where the relative position at the first epoch is known, such that the observations at the first epoch are corrected for this. Note that the design matrix is now of full rank, even in the case \(\mathbf{A}(t_{1})=\cdots=\mathbf{A}(t_{k})\).
3.2.2.3 With Antenna Swap
In this variant, the idea is to determine the ambiguities with high precision by moving the antenna of the reference receiver to the initial location of the rover receiver, while, at the same time, the antenna of the rover receiver is moved to the location of the reference receiver. This implies that after the antennas have been swapped, the carrier-phase ambiguities are not changed (as the satellites are continuously tracked), but the relative position after the swap is of opposite sign as before the swap. Making use of this property, that is, \(\boldsymbol{x}(t_{2})=-\boldsymbol{x}(t_{1})\), results in the antenna swap model as given in Table 26.8. Also this model is of full rank, even in case \(\mathbf{A}(t_{1})=\cdots=\mathbf{A}(t_{k})\).
3.2.3 (Real-Time) Kinematic Positioning
Instead of waiting until the (float) ambiguities are precise enough such that the position can be estimated with high precision, one can make use of the integerness of the double-differenced carrier-phase ambiguities. Once the ambiguities can be resolved to their integer values, they can be removed from the system of observation equations, such that the position can be solved with a very high precision.
The procedure to solve for the precise position is as follows (Chap. 23). One starts to estimate the ambiguities using model (26.13) using standard least-squares or Kalman filtering. This solution is referred to as float solution. Although for short-time spans the float ambiguities have a poor precision and high correlation, it is possible to decorrelate them resulting in ambiguities that have a better precision and less correlation. By means of a special search technique it is then possible to find the integer values of the double-differenced ambiguities. Both decorrelation and integer search are efficiently implemented in the least-squares ambiguity decorrelation adjustment (GlossaryTerm
LAMBDA
) method, which is the standard for integer ambiguity resolution (Chap. 23). Having resolved the integer ambiguities, a second standard least-squares estimation is carried out keeping these ambiguities fixed in the modelThe solution if this model is referred to as fixed solution. The fixed solution has high precision as the carrier-phase data with the integer ambiguities subtracted now act as very precise pseudorange data.
The success of integer ambiguity resolution depends on the strength of the underlying positioning model. Instantaneous ambiguity resolution, where the integer ambiguities can be resolved already after a single epoch of data, is only feasible for very strong models, such as the short-baseline GPS model based on dual-frequency phase and code data [26.47]. Weaker models, such as the short-baseline single-frequency model or the long-baseline model parameterizing ionospheric delays [26.48], require more time before the ambiguities can be reliably fixed. These weaker models can however be strengthened by incorporating dynamic models (in a Kalman filter) on some of the parameters (i. e., position, ZTD, ionospheric delays, hardware biases), or, alternatively, by combining data of multiple GNSS constellations (Sect. 26.3.4).
Because of its high productivity provided that the distance between reference and rover is short, RTK is commonly used in cadastral and engineering surveying.
3.3 GLONASS RTK Positioning
The double-differenced observation equations (26.11) form the basis of the model underlying RTK positioning. It is remarked that a formulation in terms of the undifferenced observation equations may however be used as well (see Chap. 21 as well as [26.49, 26.50]). In this section, we will address the issues that arise when the double-differenced observation equations are used for RTK based on GLONASS observations.
For GLONASS signals that are based on the FDMA technology (Chap. 8), we have to deal with interchannel code and phase biases, denoted by \(\Updelta d_{1r,j}^{s}\) and \(\Updelta\delta_{1r,j}^{s}\) in (26.1), which are not automatically eliminated in the double-differenced positioning model (26.11 ). A usual assumption for the GLONASS interchannel phase biases is that they can be modeled as a linear function of the frequency or channel [26.51], that is, \(\Updelta\delta_{1r,j}^{s}=\kappa^{s}\Updelta\delta_{1r,j}\), with κs denoting the integer channel number. Based on this, for a short baseline (neglecting the differential atmospheric biases), the double-differenced observation equations for GLONASS read
In contrast to the phase interchannel biases, the interchannel biases for code can however not be modeled as a linear function [26.52]. Besides the presence of the differential interchannel biases, there is another difference with the phase observation equations for CDMA signals: the carrier-phase ambiguity is due to the satellite or channel-dependent wavelengths not directly estimable as a double-differenced ambiguity, which would imply that we cannot make use of its integer property, which is the key to high-precision RTK positioning.
The presence of phase interchannel biases poses a first problem for the estimation of the ambiguities, as they cannot be estimated separately from each other (as their columns in the design matrix of the model would show a rank deficiency). However, in case the RTK baseline is formed by pairs of receivers that are of the same manufacturer, it turns out that they can be ignored, that is, \(\Updelta d_{1r,j}^{1s}=0\) and \(\Updelta\delta_{1r,j}=0\), removing them from the differential GLONASS observation equations [26.53]. In the case that the baseline is observed by receivers of different manufacturers (i. e., mixed receiver pairs), it is possible to calibrate these interchannel biases, based on their stability [26.54]. A-priori correction values for \(\Updelta\delta_{1r,j}\) are provided in [26.54, 26.55], from which follows that they can range up to 5 cm for adjacent channels (i. e., for \(\kappa^{1s}=0\)) for a certain mixed receiver pair. The size of the interchannel biases for code may range up to 5 m [26.56].
Unfortunately, ignoring or correcting the interchannel biases does not automatically mean that the GLONASS ambiguities can be estimated as double-differences and thus as integers. In the literature, some authors [26.53, 26.57] try to overcome this by rewriting the ambiguity term as its equivalent
Thus, the GLONASS ambiguity combination is rewritten as a double-differenced ambiguity \(N_{1r,j}^{1s}\), plus the between-receiver differenced ambiguity that corresponds to the pivot satellite \(N_{1r,j}^{1}\). Unfortunately the two ambiguity terms cannot be estimated as separate parameters. Takac [26.53] proposes to get an approximation of \(N_{1r,j}^{1}\) by estimating it from the difference of the between-receiver differenced code and phase observations
The additional assumption to approximate \(N_{1r,j}^{1}\) is that differential code-phase receiver bias \(d_{1r,j}^{r}-\delta_{1r,j}^{r}\) is zero for identical receiver pairs, while it can be calibrated for mixed receiver pairs. However, since the precision of the approximate \(N_{1r,j}^{1}\) is not very high, as it is driven by the noisy code data, it may result in unreliable resolution of the double-differenced ambiguities \(N_{1r,j}^{1s}\) [26.58].
An alternative formulation to deal with the GLONASS pivot ambiguity is presented by [26.59]. Here the authors reparameterize the GLONASS ambiguity terms in (26.16) as
Here the double-differenced and pivot satellite ambiguities are reparameterized as
Use is made of the property that
Note that the reparameterized double-differenced ambiguity \(\tilde{N}_{1r,j}^{1s}\) is biased by a multiple of the integer ambiguity between satellite 2 and the pivot satellite, that is, \({N}_{1r,j}^{12}\). Because of this, satellite 2 can be considered as a second pivot satellite. Because the reparameterized double-differenced ambiguity \(\tilde{N}_{1r,j}^{1s}\) is not an unknown parameter for this second pivot satellite (it only shows up from the third satellite onward), it is now possible to separate both reparameterized ambiguities, which means that both double-differenced ambiguities \(\tilde{N}_{1r,j}^{1s}\) and the between-receiver differenced ambiguity of the first pivot satellite \(\tilde{N}_{1r,j}^{1}\) can be estimated.
There seems however to be one problem: the double-differenced ambiguities \(\tilde{N}_{1r,j}^{1s}\) are generally not integer, as they are biased by \(({\kappa^{1s}}/{\kappa^{12}}){N}_{1r,j}^{12}\). Although the GLONASS channel numbers κs are integers (and thus κ1s as well), in general the fraction \({\kappa^{1s}}/{\kappa^{12}}\) destroys the integerness of \(\tilde{N}_{1r,j}^{1s}\). However, there is an exception: in case the channel numbers of the two pivot satellites differ by one (i. e., \(|\kappa^{12}|=1\)), the fraction \({\kappa^{1s}}/{\kappa^{12}}\) will actually be an integer and, consequently \(\tilde{N}_{1r,j}^{1s}\) will be an integer as well. Thus, this implies that the two GLONASS pivot satellites cannot be arbitrarily chosen, but this should be two satellites with adjacent channel numbers . Only in that case integer resolution of GLONASS ambiguities becomes possible. However, it is stressed that this approach of GLONASS integer ambiguity resolution fully relies on the underlying assumption that the differential interchannel biases may be ignored (i. e., \(\Updelta d_{1r,j}^{1s}=0\) and \(\Updelta\delta_{1r,j}=0\)), which only holds for identical receiver pairs. For mixed receivers still external calibrations are needed, despite the claims made by [26.59].
3.4 Multi-GNSS RTK Positioning
The presence of more than one GNSS constellation benefits RTK positioning as code and phase data of multiple systems can be integrated in the positioning model. This was already demonstrated in Chap. 21 for the model underlying SPP, but it also applies to RTK positioning.
If we restrict ourselves to CDMA-based constellations, the interchannel biases are absent and for an arbitrary constellation S the between-receiver differenced code and phase observation equations read as in (26.1). Selecting a pivot satellite for each constellation then yields double-differenced observation equations, similar to (26.11), but then for each constellation. Common parameters between the constellations are the receiver position coordinates, plus ZTDs if these are parameterized; all other estimable parameters are constellation specific. It is possible to have a multi-GNSS model that is stronger than sketched as above, by making use of frequencies that are identical between different systems (e. g., GPS L1 and Galileo E1).
3.4.1 Differential Intersystem Biases (DISBs)
For frequencies that are identical between constellations, it is possible to difference the data of the second constellation using the data of the pivot satellite of the first constellation. Consider two receivers tracking data of two constellations, denoted by A and B (Fig. 26.7), then the double-differenced observation equations read (for a short baseline), for observations of constellation A
Here \(s_{\mathrm{A}}=2_{\mathrm{A}},\ldots,m_{\mathrm{A}}\), with mA the number of satellites that are tracked of constellation A. The pivot satellite of A is denoted by 1A. We may now difference the observations of constellation B that are tracked on the same frequency as observations of constellation A relative to the pivot satellite of A. This yields, assuming \(\lambda_{j}^{\mathrm{B}}=\lambda_{j}^{\mathrm{A}}\)
Here \(s_{\mathrm{B}}=1_{\mathrm{B}},\ldots,m_{\mathrm{B}}\), with mB the number of satellites that are tracked of constellation B. Note that for constellation B, we have one double difference more for phase and code, which corresponds to the first satellite of B, denoted by 1B. At the same time, there are additional parameters to be estimated for constellation B, which are
These are the differential intersystem biases (DISBs) [26.60] for code and phase. We emphasize that the above definitions of the DISB parameters apply to the short-baseline model in the absence of differential atmospheric biases. The estimability and interpretation of the DISBs change for the ionosphere-float model, in which the ionospheric delays are estimated and which is used for longer baselines [26.61].


(a) Two constellations, A and B, each defining its own pivot satellite, denoted by 1A and 1B; (b) two constellations, A and B, having the pivot satellite in common, in this case 1A, based on the assumption that the DISBs are known or zero
The performance of the model parameterized into DISBs is exactly the same as model with constellation-specific pivot satellites. Only in case we have information on these DISBs and include this in the model, the performance will be better. In the case we a priori know the DISBs, the observations can be corrected for them
for \(s_{\mathrm{B}}=1_{\mathrm{B}},\ldots,m_{\mathrm{B}}\). Now, in the absence of DISB parameters, the observations of constellation B can be processed identically as those of constellation A, as they have a common pivot satellite and identical type of parameters. In other words, both constellations can be processed as if their signals correspond to one constellation (Fig. 26.7 ). This is referred to as tightly combined processing in [26.62]. Whereas in a combined model consisting of observation equations (26.11) for each constellation, there are \(f(m_{\mathrm{A}}+m_{\mathrm{B}}-2)\) estimable integer ambiguities (assuming f frequencies for both constellations), this is increased with f integer ambiguities for the tightly combined or DISB-known model.
Concerning the size and variability of the DISBs, it was demonstrated that for pairs of identical receivers, that is, receivers of the same manufacturer, the DISBs are close to zero, that is, \(\delta_{1r,j}^{\text{AB}}=0\) and \(d_{1r,j}^{\text{AB}}=0\), whilst for mixed receiver combinations they are nonzero, but very stable in time [26.60, 26.63, 26.64].
As example, Fig. 26.8 depicts DISBs for phase and code that are estimated for the GPS L1 and Galileo E1 frequencies (both 1575.42 MHz). The figure shows that for the baseline at the University of New Brunswick, Canada, that consists of mixed receivers the mean of the estimated phase DISBs is about \(-{\mathrm{0.2}}\,{\mathrm{cyc}}\), while the estimated code DISB has a mean of about 2 m. For another baseline in Wetzell, Germany, which consists of receivers that are both of Leica, the DISBs for both phase and code are estimated with a mean that is close to zero.


Example of L1 (GPS) – E1 (Galileo) DISBs for phase (top graphs) and code (bottom graphs), estimated for the 20 m baseline between UNB3 (Trimble NetR9) and UNBD (Javad TRE-G2T) (a) and the zero baseline between WTZ2 (Leica GR25) and WTZR (Leica GRX1200+GNSS) (b). Gaps in the time series mean that Galileo satellites were not tracked during that period
Figure 26.9 shows the estimated DISBs for another frequency, that is, Galileo’s E5b and BDS’s B2 frequency (both 1207.14 MHz). The left graphs show that for a zero baseline at the campus of Curtin University (Australia) consisting of mixed receivers the mean of the estimated phase DISBs is about \(-{\mathrm{0.1}}\,{\mathrm{cyc}}\), while the estimated code DISB has a mean of about 2.6 m. On the other hand, the right graphs depict that the phase and code DISBs estimated for another zero baseline at Curtin University, this time consisting of two identical Trimble receivers, are close to zero.


Example of E5b (Galileo) – B2 (BDS) DISBs for phase (top graphs) and code (bottom graphs), estimated for the zero baseline between CUT0 (Trimble NetR9) and CUT3 (Javad TRE-G3TH) (a) and the zero baseline between CUT0 (Trimble NetR9) and CUT2 (Trimble NetR9) (b). Gaps in the time series mean that Galileo satellites were not tracked during that period
3.4.2 Differential Inter-Satellite-Type Biases (DISTBs)
In case BDS data are used for RTK positioning, either standalone or combined with other GNSSs, another type of bias has shown up in case the baseline consists of mixed receivers. This is the so-called (differential) inter-satellite-type bias (ISTB), that is present between the signals at the same frequency of the BDS geostationary (GEO) satellites on one hand and the other BDS (IGSO, MEO) satellites on the other hand [26.65, 26.66].
Table 26.9 summarizes the phase DISTBs for two receiver manufacturers, relative to a Trimble receiver. Like the DISBs, the DISTBs turn out to be very stable, such that they can be calibrated. It follows from [26.65] that the GEO satellites have phase DISTBs of exactly half cycles with respect to IGSO/MEO satellites in the case of mixed receivers. However, it depends on the combination of mixed receiver types, which frequency is actually affected and which not. As follows from Table 26.9, the B1 frequency is not affected for the Trimble–Septentrio combination, but is affected for the Trimble–Javad combination. For the B2 frequency, the effect is vice versa.
After the discovery in [26.65], the GNSS receiver manufacturers updated their receivers firmware in order to eliminate the DISTBs when using mixed receivers for BDS RTK [26.66]. However, users who employ receivers with old firmware should still be aware of the presence of DISTBs when processing BDS data.
3.5 RTK Positioning Examples
To provide insight into the actual performance of RTK ambiguity resolution and positioning, in this subsection examples are presented that are obtained in Western Australia. This is done based on data for both GPS standalone as well as multi-GNSS RTK (GPS+BDS).
Results are shown for both a short (1 km) baseline, observed between stations CUT0 and CUTT, both at Curtin University campus, as well as a long baseline that was measured between Curtin’s CUT0 and a receiver stationed in Muresk (MURK) at a distance of 80 km. Short and long here refer to whether the differential ionospheric biases can be neglected or not.
Table 26.10 summarizes some details concerning the types of receivers that have collected the data, as well as the time of measurements, data cut-off angles, and sampling intervals. For the short baseline, data are processed in both single-frequency and dual-frequency modes, whereas for the long-baseline data are only processed in dual-frequency mode, as the long-baseline single-frequency model is too weak.
Once the float ambiguities are precise enough, integer ambiguity resolution is performed at each epoch by means of the LAMBDA method in combination with the fixed failure-rate ratio-test (FFRT ; Chap. 23).
3.5.1 Short-Baseline RTK Results
Figures 26.10–26.14 show the time series of the position solution for rover CUTT, estimated in kinematic mode (for each epoch; no dynamic model on the position), in east-north-up. These components are relative to the ground-truth position for CUTT. Each figure shows two curves, one with the ambiguities float and the other with the ambiguities fixed. Next to the graphs, tables with empirical standard deviations are given. The float solution is obtained by means of a Kalman filter, with only a dynamic model on the ambiguities (i. e., they are time constant). Note from the figures that the ambiguity-fixed solution does not always start at the beginning of the time span, but it is only computed as soon as the ambiguities can be reliably fixed to integers (which is after acceptance by the FFRT). The tables with empirical position standard deviations therefore only present the float solution for the time after the ambiguities can be fixed, as to directly compare them to their fixed counterparts. This implies that one has to be careful when the float standard deviations are compared that correspond to different processing strategies.


GPS L1 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 1 km baseline CUT0-CUTT


BDS B1 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 1 km baseline CUT0-CUTT


GPS+BDS L1+B1 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 1 km baseline CUT0-CUTT


GPS L1+L2 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 1 km baseline CUT0-CUTT


GPS L1+L2 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 1 km baseline CUT0-CUTT, based on epoch-by-epoch processing
From Figs. 26.10–26.13 , it can be seen that in all cases the float solution needs time before it has converged, where the time of convergence depends on the strength of the model. If we assume a convergence criterion of 1 cm in both horizontal components and of 2 cm in the vertical component, Table 26.11 gives the time that is needed for each scenario in order for the float solution to converge.
For single-frequency GPS, this convergence time is 0.5 h, but for single-frequency BDS this is much longer: as many as 4 h are required. This very slow convergence is probably due to the geostationary satellites of BDS for which the geometry hardly changes over time. Moreover, due to this almost stationary geometry multipath on the signals of these geostationary satellites gets barely averaged out in time [26.67]. With stronger models, the convergence time is reduced: for single-frequency GPS+BDS as well as dual-frequency GPS this is 20 min and 25 min, respectively (compared to 30 min for GPS L1). These relatively long convergence times can be avoided using ambiguity resolution .
Table 26.11 also presents the time that is needed to fix the ambiguities to integer. For single-frequency GPS this is 4 min and this is considerably less time than the 30 min that are needed for the float solution to converge. After these 4 min, the fixed position solution has immediately an accuracy at the centimeter level (Fig. 26.10). Also the time-to-fix-ambiguities for single-frequency BDS is much shorter than the float convergence time. For the stronger multi-GNSS (GPS L1 & BDS B1) and dual-frequency GPS models, the times-to-fix-ambiguities are extremely fast; based on only a single epoch of data the ambiguities can be fixed (instantaneous ambiguity resolution).
Alternatively, Fig. 26.14 presents the position errors for the dual-frequency GPS case, but now based on an epoch-by-epoch processing instead of Kalman filtering. In this case, the model is so strong such that it is not necessary to keep the ambiguities constant in time. As there are no dynamic models for any of the parameters, the float position solution is fully governed by the code data; this explains the noisy (decimeter to meter level) float position errors in Fig. 26.14. The fixed solution is however very precise (millimeter to centimeter level).
Then in this example the demonstrated performance of single-frequency multi-GNSS RTK even allows for an increase of the cut-off elevation , other than the customary cut-off angle that is typically set to 10 ° as done in this example. In [26.68, 26.69], it is demonstrated that a high cut-off angle set to 35 ° still results in high ambiguity resolution success rates. This makes RTK more robust for applications in environments where GNSS signals at low elevations are obstructed or experience multipath, such as for example in urban canyons or open-pit mines.
3.5.2 Long-Baseline RTK Results
In a similar way as for the short baseline, Figs. 26.15–26.17 show the float and fixed position errors but now for rover MURK corresponding to the long (80 km) baseline. Figure 26.15 gives the results for dual-frequency GPS, Fig. 26.16 for dual-frequency BDS and Fig. 26.17 for the combination of both constellations. For these three scenarios, Table 26.12 presents the time needed before the float solution is converged, as well as the time that is needed to reliably fix the integers and obtain a fixed solution.


GPS L1+L2 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 80 km baseline CUT0-MURK


BDS B1+B2 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 80 km baseline CUT0-MURK


GPS+BDS L1+L2&B1+B2 RTK float (light) vs. fixed (dark) position errors, as well as standard deviations for 80 km baseline CUT0-MURK
The long-baseline model is weaker than the short-baseline model, because of the presence of differential ionospheric parameters, as well as a (residual) ZTD parameter. Because of this, the convergence criterion is slightly relaxed compared to the short-baseline model: 2 cm for the horizontal components and 5 cm for the vertical component. From Table 26.12, it follows that in case of GPS-only this criterion is met only after about 3 h. An even longer convergence time is required for BDS-only: almost 4.5 h. This longer time than GPS for BDS is, like in the short-baseline case, probably due to the stationary geometry of the geostationary satellites, in combination with systematic multipath biases which have a larger impact on the convergence time than the presence of the additional atmospheric parameters in the model, as the convergence time of the short-baseline model is already 4 h. These types of long convergence times for BDS were also observed by [26.70, 26.71]. GPS combined with BDS has the shortest convergence time, but still almost 3 h. From Fig. 26.17, it follows that mainly for the east component it takes this long time before it has converged to a level below 2 cm.
Integer ambiguity resolution fortunately has a favorable effect. In the GPS-only case, the integers can be fixed after 35 min, while this is 80 min for BDS-only. Combining GPS and BDS has the shortest time-to-fix, which is just 20 min (Table 26.12). After these times, for all three scenarios the fixed position precision is at the subcentimeter level horizontally and below 3 cm vertically, see Figs. 26.15–26.17. One can see from the tables at the right side of the graphs that the gain due to ambiguity fixing is for the long-baseline cases less than for the short-baseline cases, see the tables corresponding to the short-baseline graphs in Figs. 26.10–26.14. This is because ambiguity resolution needs more time in the long-baseline cases and at the times the ambiguities are finally fixed, the float position precision has already been improved considerably due to the change in receiver-satellite geometry.
4 Network RTK
This section deals with the extension of the RTK technique to network RTK. It describes the required processing steps to be performed on the reference station observations, different forms of network RTK realizations, typical correction models, and it discusses PPP-RTK.
4.1 From RTK to Network RTK
One significant drawback of single base RTK, as described above, is that the maximum distance between reference station and rover receiver must not exceed 10–20 km in order to be able to rapidly and reliably resolve the carrier-phase ambiguities. This limitation is caused by distance-dependent biases, mainly ionospheric signal refraction but also orbit errors and tropospheric refraction (Sect. 26.1.2). These errors, however, can be accurately modeled using the measurements of an array of GNSS reference stations surrounding the rover site. Thus, the solution to the distance limitation of RTK lies in multibase techniques which became popular under the name network RTK, sometime abbreviated to NRTK. In fact, also network RTK has a distance limitation. This limitation refers to the distances between the reference stations. They should not exceed 100–200 km in order to be able to produce highly accurate real-time correction models of the distance-dependent errors.
Similar to the development of wide-area DGNSS as an extension of local single base DGNSS (Sect. 26.2.1), the network RTK technique enabled the establishment of positioning services which serve larger regions or whole countries by setting up and maintaining networks of reference stations, collecting and preprocessing their observations and distributing observation corrections in real time to RTK users. Only because of the development of network RTK such services became feasible. An area of \({\mathrm{100000}}\,{\mathrm{km^{2}}}\) requires a network of about 20 reference stations spaced by 75 km if the network RTK technique is used. In comparison, a service using single base RTK with maximum distances to the closest reference station of 7.5 km would require about 900 equally spaced reference receivers for the same area.
4.2 Data Processing Methods for Network RTK
Network RTK requires the processing of the reference station observations in order to produce real-time correction models of the distance-dependent errors. Therefore, the reference station observations of a whole network (or a subnetwork) must be gathered at one data processing site, usually a central processing center. From there, the rover receivers are fed with those reference corrections and model coefficients that they are enabled to perform RTK positioning.
The main data processing steps between gathering the reference station observations and the RTK positioning result are the following (Fig. 26.18).


Network RTK processing steps and data transmission options
In the first processing step ([1] in Fig. 26.18) ambiguity fixing is performed in the reference station network. This also includes that the undifferenced carrier-phase observations are altered according to the determined double-difference ambiguity values so that afterward all observations are on the same ambiguity level. Only observations with fixed ambiguities can be used for the precise modeling of the distance-dependent errors. This processing step is the crucial part of network RTK because ambiguities of rather long baselines (50–100 km) have to be fixed and they must be fixed in real-time. This network ambiguity resolution differs considerably from common RTK ambiguity resolution since the station coordinates are precisely known. All existing difficulties are caused by observation errors and all a priori information which is able to reduce these errors should be used: IGS predicted satellite ephemerides, ionospheric, and tropospheric corrections based on recent results of the network processing, carrier-phase multipath corrections from the evaluation of the past network data, and antenna phase centre corrections from antenna calibrations.
In the second processing step correction model coefficients are estimated ([2] in Fig. 26.18). Several techniques have been developed to model (or interpolate) the distance-dependent biases between reference stations and user receivers. For an overview of potential algorithms, see [26.72] and [26.73]. Ionospheric and orbit biases must be modeled individually for each satellite. Tropospheric corrections, however, may be estimated station by station. It is advantageous to separate the dispersive (ionospheric) biases from the nondispersive biases (orbit and troposphere, sometimes referred to as geometric), since ionospheric errors show larger short-term variations as compared to the other distance-dependent biases. Thus, ionospheric corrections must be updated (transmitted to the user) more often, in practice e. g., every 10 s as compared to every 60 s for orbit and tropospheric corrections. Furthermore, in order to be able to correct for small-scale features of ionospheric refraction the modeling area should be kept small, that is, ionospheric correction models may be based on the observations of just three surrounding reference stations. On the other hand, the quality of the geometric correction models may improve when a larger number of reference stations is used.
In the third processing step of network RTK ([3] in Fig. 26.18), a set of computed reference observations is produced from the real observations of a selected master reference station, often the one closest to the rover receiver, and the precise correction models for distance-dependent biases. Based on the correction models and horizontal coordinate differences between master reference position and approximate rover position, the reference observations are virtually shifted to the rover site. This results in virtual reference station (VRS) observations.
The fourth and last step ([4] in Fig. 26.18) consists of the RTK style baseline processing between VRS and rover.
Existing network RTK positioning services run one or more network processing centers where the reference station observations are gathered and where they are preprocessed. The data processing consists at least of real-time ambiguity resolution of the network carrier-phase observations. This goes along with a rigorous quality control of the data. Furthermore, the spatial stability of the reference station antennas is controlled based on the gathered observations. More processing steps may be performed in the processing center, depending on selected communication links and data formats for transmitting the network data to the user.
Figure 26.18 depicts five ways of how to transfer network information to the user. These approaches differ with respect to allocation of the processing steps either to the network processing center or to the rover. This affects the information content and the data formats of the messages to be transmitted to the rover, and also the selection of appropriate communication channels. Nowadays the most widely used methods are (B) and (D).
4.2.1 Observations of Several Reference Stations
((A) in Fig. 26.18 ): The rover station receives the observation data streams of several reference stations surrounding his position. After ambiguity resolution of the network data, the rover is able to compute network corrections and even VRS observations to be used for his positioning. The major drawback of this method is related to the ambiguity resolution of the network observations which usually requires an initialization time of several minutes.
4.2.2 Network Observations on Common Ambiguity Level
((B) in Fig. 26.18 ): Broadcast of observations of a master reference station and observation differences between auxiliary reference stations and master reference station, all being on the same ambiguity level. The user performs the interpolation step on its own and thus obtains network corrections and valuable information on their quality. Then, he is able to compute VRS observations and his position in the baseline mode. This technique is known under the name of master-auxiliary concept (MAC) [26.74, 26.75].
4.2.3 Coefficients of Correction Model
((C) in Fig. 26.18): Broadcast of observations of a master reference station and coefficients of the correction models of distance-dependent biases. The user applies the correction models to the reference station observation data set according to the coordinate differences between his position and the position of the master reference station, and thus he obtains VRS observations for his site. This technique is often referred to as FKP, an abbrevation of the German term Flächen–Korrekturparameter which stands for area correction parameters (Sect. 26.4.3, [26.24, 26.76]).
4.2.4 Virtual Reference Station (VRS) Observations
((D) in Fig. 26.18): The user sends his approximate position to the central computing facility and by return receives VRS observations to be used for baseline positioning [26.77, 26.78]. In the early days of network RTK, a major advantage of this technique was that no upgrade to the user equipment software was necessary. But, this method has the drawback that in general no information can be provided on the quality of the interpolation process and thus on the quality of the VRS reference observations.
4.2.5 Precise Rover Position
((E) in Fig. 26.18): The observations of the rover receiver are transmitted to a central processing facility where the baseline processing from VRS to rover is performed. The rover’s precise position and quality information may be transmitted back to the user.
Data transfer of reference station observations and broadcast ephemerides to the central processing facility and also of data products from the central processing facility to the user requires adequate communication channels and data formats. The most widely used format for transmission of real-time GNSS observation data and intermediate products is RTCM Standard 10403.2. Positioning results are transmitted using National Marine Electronics Association (GlossaryTerm
NMEA
) 1083. In the case of post-processing and transmission of data files, receiver independent exchange format (GlossaryTermRINEX
) is the most common open format. It can be used for GNSS observations ((A) and (D) in Fig. 26.18) and broadcast ephemerides, but not for observation differences between stations ((B) in Fig. 26.18) or coefficients of correction models ((C) in Fig. 26.18). More details on data formats are found in Annex A.4.3 Network RTK Correction Models
An often used, simple and robust model for network RTK corrections makes use of horizontal gradients of the distance-dependent errors. It is convenient to separate dispersive (ionosphere) from nondispersive (troposphere and orbit) errors. This separation requires dual-frequency carrier-phase observations at the reference stations. The minimum number of reference stations is usually three which surround the service area. The horizontal gradients define a plane correction surface (Fig. 26.19), thus a two-dimensional (2-D) linear interpolation is performed.


Correction by linear interpolation
These horizontal gradients are usually referred to as FKP . Sets of FKP values are determined for each individual satellite. Such a set consists of four values: namely FKPN0, FKPE0 which are the distance-dependent gradients of the nondispersive errors in ppm for north-south and east-west direction, respectively, and FKPNI, FKPEI which are the distance dependent gradients of the dispersive errors scaled to their effects on GPS L1 frequency f1 in ppm for north–south and east–west direction, respectively. The distance-dependent errors in m for the nondispersive and dispersive components are calculated as
where \(\Updelta{r}_{\mathrm{N}}\) and \(\Updelta{r}_{\mathrm{E}}\) are the horizontal coordinate differences in kilometer for the north–south and east–west directions, respectively, of a baseline, for example, between master reference station and rover station.
The distance-dependent errors \(\delta{e}_{\varphi}\), \(\delta{e}_{p}\) for a carrier-phase measurement and a code measurement on frequency f are computed as
where f1 is the GPS L1 frequency.
There are variations of (26.24) and (26.25) which are also in practical use. Differences exist with regard to the selected reference frequency to which the dispersive effects are scaled and sometimes the dispersive effects are mapped to the zenith direction [26.36]. This, however, causes no or only negligible changes of the correction effects.
A typical time series of FKP values are shown in Fig. 26.20. Each line connects the model coefficients of a specific satellite. The FKP for the dispersive effects (lower panels) are often larger in size and show more short-term variations. This emphasizes that one should consider updating them more frequently as those values which correct nondispersive effects, for example, every 10 s as compared to every 60 s (upper panels of Fig. 26.20).


Examples of FKP values
4.4 Refined Virtual Reference Stations
Computing VRS observations involves the shift of the master reference observations to the selected position of the VRS. This shift actually consist of two different processes: one performs the geometrical shift of the observations mainly considering the changing distances to the satellites, the other applies corrections for the distance-dependent biases according to the latitudinal and longitudinal differences between master reference station position and VRS position. In general, the same VRS position is used for both processes. Only then, the VRS is able to resemble real observation data collected at this site.
There are reasons to refine this concept and to distinguish between two different positions of a VRS: the geometric position and the position used to apply the correction models (Fig. 26.21). The latter position should be as close as possible to the actual rover position. The geometric position of the VRS may be a different one.


Modification to the generation of VRS observations
Experience shows that parts of the ionospheric errors can be of very small-scale size, so that they are not completely captured in a regional network of reference stations. Thus, the baseline from the VRS to the rover often contains more remaining ionospheric errors than a short baseline between a real reference station and the rover would do. As a consequence, the baseline processing between VRS and rover must not assume a complete elimination of ionospheric effects which would be correct for a very short baseline between two real receivers. It should assume that the residual ionospheric effects are as large as those of a baseline of a few or even more kilometers depending on the actual ionospheric conditions, on the distances between the real reference stations, and on the modeling approach.
In order to communicate this information to the user, a different form of virtual reference station is created, a so-called PRS or i-MAX [26.79]. The geometric position of the VRS is selected in such a way that the baseline length to the rover receiver is able to reflect the size of the remaining ionospheric errors which can then be handled by an appropriate stochastic modeling approach.
Another kind of refined VRS is suggested for larger scale kinematic applications. A moving rover requires changing positions of the virtual reference station. Since baseline processing software do not accept a moving reference station, a so-called semikinematic VRS [26.80] is produced. The corrections of the distance-dependent errors are applied according to the changing positions of the moving rover. At the same time, a fixed position of the VRS is used to imitate best a reference station.
Such refined VRS are produced for individual rovers and they must only be used for baseline processing with those rover receiver.
4.5 From Network RTK to PPP-RTK
In recent years, precise point positioning (PPP, Chap. 25) without or with ambiguity fixing started to compete with the differential positioning technique RTK. One of the main drawbacks of PPP is the fairly long convergence time of several to many minutes which is needed to obtain accurate ambiguity estimates or a reliable ambiguity fixing. With RTK or network RTK the convergence times usually do not exceed 1 or 2 min and the obtainable positioning accuracies exceed those of PPP.
The main reason for these differences lies in the correction or elimination by differencing of ionospheric and tropospheric errors. Local (RTK) or regional (network RTK) reference stations can be considered as atmospheric sensors whose information is able to speed up ambiguity fixing. This leads to PPP-RTK where faster PPP ambiguity fixing and also higher accurate positioning results are obtained by including atmospheric corrections based the on observation data of local or regional GNSS reference stations. The overall performance of PPP-RTK is similar to the one of network RTK [26.81, 26.82, 26.83].
Abbreviations
- BDS:
-
BeiDou Navigation Satellite System
- CDMA:
-
code division multiple access
- DGNSS:
-
differential GNSS
- EGNOS:
-
European Geostationary Navigation Overlay Service
- FDMA:
-
frequency division multiple access
- GAGAN:
-
GPS-aided GEO Augmented Navigation
- GBAS:
-
ground-based augmentation system
- GEO:
-
geostationary Earth orbit
- GLONASS:
-
Global’naya Navigatsionnaya Sputnikova Sistema (Russian Global Navigation Satellite System)
- GNSS:
-
global navigation satellite system
- GPS:
-
Global Positioning System
- GPT:
-
global pressure and temperature (model)
- IGS:
-
International GNSS Service
- IGSO:
-
inclined geo-synchronous orbit
- LAMBDA:
-
least-squares ambiguity decorrelation adjustment
- MEO:
-
medium Earth orbit
- MSAS:
-
Multi-Function Satellite Augmentation System
- NMEA:
-
National Marine Electronics Association
- PPP:
-
precise point positioning
- PRC:
-
pseudorange correction
- QZSS:
-
Quasi-Zenith Satellite System
- RINEX:
-
receiver independent exchange (format)
- RRC:
-
range-rate correction
- RTCM:
-
Radio Technical Commission for Maritime Services
- RTK:
-
real-time kinematic
- SA:
-
selective availability
- SBAS:
-
satellite-based augmentation system
- SPP:
-
single point positioning
- TEC:
-
total electron content
- UTC:
-
Coordinated Universal Time
- VHF:
-
very high frequency
- VTEC:
-
vertical total electron content
- WAAS:
-
Wide Area Augmentation System
- ZTD:
-
zenith troposphere delay
References
Y. Georgiadou, K.D. Doucet: The issue of selective availability, GPS World 1(5), 53–56 (1990)
F. van Graas, M.S. Braasch: Selective availabity. In: Global Positioning System: Theory and Applications, Vol. 1, ed. by B. Parkinson, J.J. Spilker Jr. (AIAA, Washington 1995) pp. 601–621
J.K. Gupta, L. Singh: Long term ionospheric electron content variations over Delhi, Ann. Geophysicae 18, 1635–1644 (2001)
S. Skone, S.M. Shrestha: Limitations in DGPS positioning accuracies at low latitudes during solar maximum, Geophys. Res. Lett. 29(10), 81/1–81/4 (2002)
R. Warnant: Influence of the ionospheric refraction on the repeatability of distances computed by GPS, Proc. ION GPS-97, Kansas City (ION, Virginia 1997) pp. 217–224
A.J. Coster, M.M. Pratt, B.P. Burke, P.N. Misra: Characterization of atmospheric propagation errors for DGPS, Proc. ION AM-98, Denver (ION, Virginia 1998) pp. 327–336
H.B. Vo, J.C. Foster: Quantitative investigation of ionospheric density gradients at mid latitudes, J. Geophys. Res. 106, 21555–21563 (2001)
L. Wanninger: Effects of the equatorial ionosphere on GPS, GPS World 7(4), 48–54 (1993)
S. Skone, M. El-Gizawy, S.M. Shrestha: Limitations in GPS positioning accuracies and receiver tracking performance during solar maximum, Proc. Kinem. Syst. Geod., Geom. Navig. (KIS2001), Banff (University of Calgary, Calgary 2001) pp. 129–143
J. Saastamoinen: Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites, Geophys. Monogr. Ser. 15, 247–251 (1972)
F. Kleijer: Troposphere Modeling and Filtering for Precise GPS Leveling, Ph.D. Thesis (Netherlands Geodetic Commission, Delft 2004)
H.B. Baby, P. Gole, J. Lavergnat: A model for the tropospheric excess path length of radio waves from surface meteorological measurements, Radio Sci. 23(6), 1023–1038 (1988)
J.J. Spilker Jr.: Tropospheric effects on GPS. In: Global Positioning System: Theory and Applications, Vol. 1, ed. by B. Parkinson, J.J. Spilker Jr. (AIAA, Washington 1995) pp. 517–546
P. Bona, C. Tiberius: An experimental comparison of noise characteristics of seven high-end dual frequency GPS receiver sets, Proc. IEEE Position Location Navig. Symp., San Diego (2000) pp. 237–244
S.H. Byun, G.A. Hajj, L.E. Young: GPS signal multipath: A software simulator, GPS World 13(7), 40–49 (2002)
J. Raquet, G. Lachapelle: Determination and reduction of GPS reference station multipath using multiple receivers, Proc. ION GPS-96, Kansas City (ION, Virginia 1996) pp. 673–681
M.S. Braasch, A.J. van Dierendonck: GPS receiver architectures and measurements, Proc. IEEE 87(1), 48–64 (1999)
P. Bona: Accuracy of GPS phase and code observations in practice, Acta Geod. Geophys. Hung. 35(4), 433–451 (2000)
P.F. de Bakker, C.C.J.M. Tiberius, H. van der Marel, R.J.P. van Bree: Short and zero baseline analysis of GPS L1 C/A, L5Q, GIOVE E1B and E5aQ signals, GPS Solutions 16(1), 53–64 (2012)
T.H. Diessongo, T. Schüler, S. Junker: Precise position determination using a Galileo E5 single-frequency receiver, GPS Solutions 7(4), 230–240 (2013)
D. Odijk, P.J.G. Teunissen, A. Khodabandeh: Galileo IOV RTK positioning: Standalone and combined with GPS, Surv. Rev. 46(337), 267–277 (2014)
C. Cai, C. He, R. Santerre, L. Pan, X. Ciu, J. Zhu: A comparative analysis of measurement noise and multipath for four constellations: GPS, BeiDou, GLONASS and Galileo, Surv. Rev. 48(349), 287–295 (2016)
B. Parkinson, P. Enge: Differential GPS. In: Global Positioning System: Theory and Applications, Vol. 2, ed. by B. Parkinson, J.J. Spilker Jr. (AIAA, Washington 1995) pp. 3–50
G. Wübbena, A. Bagge, G. Seeber, V. Böder, P. Hankemeier: Reducing distance dependent errors for real-time precise DGPS applications by establishing stations networks, Proc. ION GPS-96, Kansas City (ION, Virginia 1996) pp. 1845–1852
P.J.G. Teunissen: Differential GPS: Concepts and quality control, Proc. NIN Workshop Glob. Position. Syst., Amsterdam (Netherlands Institute of Navigation, Delft 1991) pp. 1–46
C. Kee, B.W. Parkinson: Wide area differential GPS (WADGPS): Future navigation system, IEEE Trans. Aerosp. Electron. Syst. 32(2), 795–808 (1996)
H. Rho, R.B. Langley: Dual-frequency GPS precise point positioning with WADGPS corrections, Proc. ION GNSS 2005, Long Beach (ION, Virginia 2005) pp. 1470–1482
J.A. Klobuchar: Ionospheric time-delay algorithm for single-frequency GPS users, IEEE Trans. Aerosp. Electron. Syst. 23(3), 325–331 (1986)
X. Wu, X. Hu, G. Wang, H. Zhong, C. Tang: Evaluation of COMPASS ionospheric model in GNSS positioning, Adv. Space Res. 51, 959–968 (2013)
G. di Giovanni, S.M. Radicella: An analytical model of the electron density profile in the ionosphere, Adv. Space Res. 10(11), 27–30 (1990)
Y. Yuan, X. Huo, J. Ou, K. Zhang, Y. Chai, D. Wen, R. Grenfell: Refining the Klobuchar ionospheric coefficients based on GPS observations, IEEE Trans. Aerosp. Electron. Syst. 44(4), 1498–1510 (2008)
A. Angrisano, S. Gaglione, C. Gioia, M. Massaro, U. Robustelli: Assessment of NeQuick ionospheric model for Galileo single-frequency users, Acta Geophysica 61(6), 1457–1476 (2013)
J. Boehm, R. Heinkelmann, H. Schuh: Short note: A global model of pressure and temperature for geodetic applications, J. Geod. 81(10), 679–683 (2007)
D.B. Wolfe, C.L. Judy, E.J. Haukkala, D.J. Godfrey: Implementing and engineering an NDGPS network in the United States, Proc. ION GPS 2000, Salt Lake City (ION, Virginia 2000) pp. 1254–1263
A. Cameron, T. Reynolds: NDGPS loses interior, keeps coast, GPS World 27(8), 9 (2016)
Radio Technical Commission for Maritime Services: RTCM Standard 10403.2 Differential GNSS Services, Version 3 with Amendment 5 (RTCM, Arlington 2013)
G. Weber, D. Dettmering, H. Gebhard, R. Kalafus: Networked transport of RTCM via internet protocol (Ntrip) – IP-streaming for real-time GNSS applications, Proc. ION GPS 2005, Long Beach (ION, Virginia 2005) pp. 2243–2247
B. Park, J. Kim, C. Kee: RRC unnecessary for DGPS messages, IEEE Trans. Aerosp. Electron. Syst. 42(3), 1149–1160 (2006)
D. Dettmering, G. Weber: The EUREF-IP Ntrip broadcaster: Real-time GNSS data for Europe, Proc. IGS Workshop, Bern (2004)
P.J.G. Teunissen: An integrity and quality control procedure for use in multi sensor integration, Proc. ION GPS 1990, Colorado Springs (ION, Virginia 1990) pp. 513–522
P.J.G. Teunissen: GPS double difference statistics: With and without using satellite geometry, J. Geod. 71(3), 137–148 (1997)
B.W. Remondi: Using the Global Positioning System (GPS) Phase Observable for Relative Geodesy: Modeling, Processing and Results, Ph.D. Thesis (University of Texas, Austin 1984)
Y. Bock, R.I. Abbot, C.C. Counselman, S.A. Gourevitch, R.W. King: Establishment of three-dimensional geodetic control by interferometry with the global positioning system, J. Geophys. Res. 90(B9), 7689–7703 (1985)
B.W. Remondi: Performing centimeter accuracy relative surveys in seconds using carrier phase, Proc. 1st Int. Symp. Precise Position. Glob. Position. Syst. (NOAA), Rockville (National Geodetic Information Center, NOAA, Rockville 1985) pp. 789–797
C.C. Goad: Precise positioning with the global positioning system, Proc. 3rd Int. Symp. Inertial Technol. Surv. Geod. (1986) pp. 745–756
M.E. Cannon: High accuracy GPS semikinematic positioning: Modeling and results, Navigation 37(1), 53–64 (1990)
Y. Kubo, Y. Muto, S. Kitao, C. Uratan, S. Sugimoto: Ambiguity resolution for dual frequency carrier phase kinematic GPS, Proc. IEEE TENCON (2004) pp. 661–664
T. Takasu, A. Yasuda: Kalman-filter-based integer ambiguity resolution strategy for long-baseline RTK with ionosphere and troposphere estimation, Proc. ION GNSS 2010, Portland (ION, Virginia 2010) pp. 161–171
P.J. de Jonge: A Processing Strategy for the Application of the GPS in Networks, Ph.D. Thesis (Netherlands Geodetic Commission, Delft 1998)
D. Odijk: Fast Precise GPS Positioning in the Presence of Ionospheric Delays, Ph.D. Thesis (Netherlands Geodetic Commission, Delft 2002)
M. Pratt, B. Burke, P. Misra: Single-epoch integer ambiguity resolution with GPS-GLONASS L1-L2 data, Proc. ION GPS 1998, Nashville (ION, Virginia 1998) pp. 389–398
N. Reussner, L. Wanninger: GLONASS inter-frequency biases and their effects on RTK and PPP carrier-phase ambiguity resolution, Proc. ION GNSS 2011, Portland (ION, Virginia 2011) pp. 712–716
F. Takac: GLONASS inter-frequency biases and ambiguity resolution, Inside GNSS 4(2), 24–28 (2009)
L. Wanninger, S. Wallstab-Freitag: Combined processing of GPS, GLONASS and SBAS code phase and carrier phase measurements, Proc. ION GNSS 2007, Fort Worth (ION, Virginia 2007) pp. 866–875
L. Wanninger: Carrier-phase inter-frequency biases of GLONASS receivers, J. Geod. 86(2), 139–148 (2012)
H. Yamada, T. Takasu, N. Kubo, A. Yasuda: Evaluation and calibration of receiver inter-channel biases for RTK-GPS/GLONASS, Proc. ION GNSS 2010, Portland (ION, Virginia 2010) pp. 1580–1587
J. Wang, C. Rizos, M.P. Stewart, A. Leick: GPS and GLONASS integration: Modeling and ambiguity resolution issues, GPS Solutions 5(1), 55–64 (2001)
A. Leick, J. Li, Q. Beser, G. Mader: Processing GLONASS carrier phase observations – Theory and first experience, Proc. ION GPS 1995, Palm Springs (ION, Virginia 1995) pp. 1041–1047
S. Banville, P. Collins, F. Lahaye: GLONASS ambiguity resolution of mixed receiver types without external calibration, GPS Solutions 17(3), 275–282 (2013)
D. Odijk, P.J.G. Teunissen, L. Huisman: First results of mixed GPS+GIOVE single-frequency RTK in Australia, J. Spatial Sci. 57(1), 3–18 (2012)
R. Odolinski, P.J.G. Teunissen, D. Odijk: Combined GPS+BDS+Galileo+QZSS for long baseline RTK positioning, Proc. ION GNSS+ 2014, Tampa (ION, Virginia 2014) pp. 2326–2340
O. Julien, P. Alves, M.E. Cannon, W. Zhang: A tightly coupled GPS/GALILEO combination for improved ambiguity resolution, Proc. ENC/GNSS, Graz (Austrian Institute of Navigation (OVN), Graz 2003)
D. Odijk, P.J.G. Teunissen: Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution, GPS Solutions 17(4), 521–533 (2013)
J. Paziewski, P. Wielgosz: Accounting for Galileo-GPS inter-sytem biases in precise satellite positioning, J. Geod. 89(1), 81–93 (2015)
N. Nadarajah, P.J.G. Teunissen, N. Raziq: BeiDou inter-satellite-type bias evaluation and calibration for mixed receiver attitude determination, Sensors 13, 9435–9463 (2013)
N. Nadarajah, P.J.G. Teunissen, J.-M. Sleewaegen, O. Montenbruck: The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning, GPS Solutions 19(3), 357–368 (2015)
G. Wang, K. de Jong, Q. Zhao, Z. Hu, J. Guo: Multipath analysis of code measurements for BeiDou geostationary satellites, GPS Solutions 19(1), 129–139 (2015)
P.J.G. Teunissen, R. Odolinski, D. Odijk: Instantaneous BeiDou+GPS RTK positioning with high cut-off elevation angles, J. Geod. 88(4), 335–350 (2014)
N. Nadarajah, P.J.G. Teunissen: Instantaneous GPS/Galileo/QZSS/SBAS attitude determination: A single-frequency (L1/E1) robustness analysis under constrained environments, Navigation 61(1), 65–75 (2014)
M. Wang, H. Cai, Z. Pan: BDS/GPS relative positioning for long baseline with undifferenced observations, Adv. Space Res. 55, 113–124 (2014)
X. Zhang, X. He: Performance analysis of triple-frequency ambiguity resolution with BeiDou observations, GPS Solutions 20(2), 269–281 (2016)
G. Fotopoulos, M.E. Cannon: An overview of multiple-reference station methods for cm-level positioning, GPS Solutions 4, 1–10 (2001)
L. Dai, S. Han, J. Wang, C. Rizos: A study on GPS/GLONASS multiple reference station techniques for precise real-time carrier phase based positioning, Proc. ION GPS 2001, Salt Lake City (ION, Virginia 2001) pp. 392–403
H.-J. Euler, C.R. Keenan, B.E. Zebhauser, G. Wübbena: Study of a simplified approach in utilizing information from permanent reference station arrays, Proc. ION GPS 2001, Salt Lake City (ION, Virginia 2001) pp. 379–391
H.-J. Euler, S. Seeger, O. Zelzer, F. Takac, B.E. Zebhauser: Improvement of positioning performance using standardized network RTK messages, Proc. ION NTM 2004, San Diego (ION, Virginia 2004) pp. 453–461
G. Wübbena, A. Bagge: Neuere Entwicklungen zu GNSS-RTK für optimierte Genauigkeit, Zuverlässigkeit und Verfügbarkeit: Referenstationsnetze und Multistations-RTK-Lösungen, proc. 46th DVW-Fortbildungsseminar: GPS-Praxis und Trends ‘97, DVW-Schriftenreihe 35/1999, Frankfurt (1999) pp. 73–92
L. Wanninger: Real-time differential GPS error modelling in regional reference station networks. In: International Association of Geodesy Symposia, Vol. 118, (Springer, Berlin 1997) pp. 86–92
U. Vollath, A. Buecherl, H. Landau, C. Pagels, B. Wagner: Multi-base RTK positioning using virtual reference stations, Proc. ION GPS 2000, Salt Lake City (ION, Virginia 2000) pp. 123–131
F. Takac, O. Zelzer: The relationship between network RTK solutions MAC, VRS, PRS, FKP and i-MAX, Proc. ION GPS 2008, Savannah (ION, Virginia 2008) pp. 348–355
L. Wanninger: Real-time differential GPS error modelling in regional reference station networks, Proc. ION GPS 2002, Portland (ION, Virginia 2002) pp. 1400–1407
G. Wübbena, M. Schmitz, A. Bagge: PPP-RTK: Precise point positioning using state-space representation in RTK networks, Proc. ION GNSS 2005, Long Beach (ION, Virginia 2005) pp. 2584–2594
P.J.G. Teunissen, D. Odijk, B. Zhang: PPP-RTK: Results of CORS network-based PPP with integer ambiguity resolution, J. Aeronaut. Astronaut. Aviat. Ser. A 42(4), 223–230 (2010)
X. Li, M. Ge, J. Douša, J. Wickert: Real-time precise point positioning regional augmentation for large GPS reference networks, GPS Solutions 18(1), 61–71 (2014)
Acknowledgements
We would like to thank Dr Amir Khodabandeh of the GNSS Research Centre at Curtin University for his help with the writing of the GLONASS RTK section.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Odijk, D., Wanninger, L. (2017). Differential Positioning. In: Teunissen, P.J., Montenbruck, O. (eds) Springer Handbook of Global Navigation Satellite Systems. Springer Handbooks. Springer, Cham. https://doi.org/10.1007/978-3-319-42928-1_26
Download citation
DOI: https://doi.org/10.1007/978-3-319-42928-1_26
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-42926-7
Online ISBN: 978-3-319-42928-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)