
Abstract
A discrete-time density dependent model is studied by Sophia et al. in [3]. In this paper, we use this model and try to develop it by adding Allee and Refuge effects. With Allee Effect the intraspecific cooperation, with Refuge Effect environment heterogeneity are taken into account. We make the stability analysis of the resulting models together with some numerical simulations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
For discrete time one dimensional population modelling, there are two types: linear and nonlinear. First is linear model in which growth rate can be about birth, death, immigration, emigration rate and it is independent from the density. These models are in the form: \( x_{n+1}=r x_{n}\), where r is growth rate and it is constant.
The second one is nonlinear model in which growth is dependent to density. A population model is said to be density dependent if the per-capita growth rate of the population changes according to the density. The general form is \( x_{n+1}=f(x_{n})x_{n}\). The classical approach suggests that f, namely fitness function (per-capita growth rate), should be chosen as a decreasing function because of intraspecific competition and capacity constraint.
When host parasitoid interaction is considered, parasitoid density heavily depends on host population and generally can not live without their host. So, adding density dependence to the host population makes the model more realistic. To be density dependent, in the absence of parasitoid the host population should be in the form of nonlinear one dimensional model.
An insect parasitoid is an organism whose larvae develops in or on its host (insect), damages to it and kills it eventually. They are smaller than host and specialized in their choices. Since they usually target certain groups, in the absence of their target group they can not survive. Using these biological properties, host-parasitoid interaction can be modelled mathematically as the following form:
In this system of equation \(H_{t}\) denotes the number or density of host (prey) species, \(P_{t}\) denotes the density (number) of parasitoid (predator) at time t. Time period can be in terms of hours, days, months or years. \(b>0\) is the parameter of reproduction rate of host, \(c>0\) is the parameter denoting average number of egg (larvae) released by parasitoid on a single host. \(f(H_{t}, P_{t}) \) stands for probability of not to be parasitized and \(1-f(H_{t}, P_{t})\) is the probability of being parasitized at time t.
In 1980, Wang [1] asked a remarkable question: “Does the ordering of density dependence and parasitism in the host life cycle have a significant effect on the dynamics of the interaction?” May et al. tried to answer this question giving three different model types according to the order and make numerical simulations of these models in [2].
2 The Model
May et al. [2] concluded that the sequence of density dependence and host parasitoid interaction have a marked effect on the population dynamics by examining three different host-parasitoid model. Another conclusion is that the most frequent choice will be between Model2 and Model3.
For the case given as Model3, parasitism acts first, followed by the density dependence but only on the survivors from parasitism (i.e. \(H_{t}f(P_{t})\)) and the model type is:
Letting \(f(P_{t})=e^{-bP_{t}}\) and \(g(H_{t}, f(P_{t}))= \frac{\lambda }{{1+k}H_{t}e^{-bP_{t}}}\) and adding \(\beta \) multiplier to the second equation one can get:
Sophia et al. use this model in [3] and make the stability analysis. In model (3) note that the host population in the absence of the parasitoid is modeled by Beverton-Holt equation \(\frac{\lambda H}{1+k H}\). Beverton-Holt Model is obtained if a decreasing rational function is used as fitness (density function). \(\beta >0\) is the parameter denoting average number of egg (larvae) released by parasitoid on a single host. All parameters are positive.
2.1 Stability Analysis of Model (3)
Theorem 1
For the system (3)
(i) if \(\lambda < 1\) the only fixed point is (0,0)which is locally asymptotically stable.
(ii) if \(1<\lambda < 1+\frac{k}{\beta b}\) there are two fixed points: (0,0) is unstable and (\(\lambda -1\over k\),0) is locally asymptotically stable.
(iii) if \(\lambda > 1+\frac{k}{\beta b}\) there are three non-negative fixed points which are (0,0),(\(\lambda -1\over k\),0) and coexistence fixed point (\(H^*\),\(P^*\)) which can not be found explicitly.
(iv) if \(\lambda = 1\), (0,0) coincides with (\(\lambda -1\over k\),0) and it is unstable.
(v) if \(\lambda = 1+\frac{k}{\beta b}\) then (\(\lambda -1\over k\),0) is unstable.
Proof. (i), (ii) and (iii) can be written from [3].
(iv) If \(\lambda = 1\) the eigenvalues are \(\lambda _1=1\) and \(\lambda _2=0\).
We can use Center Manifold Theorem [4]. This theorem can be applied for the fixed point (0, 0). Since our fixed point is (0, 0) let H=x, P=y.
First let us write our system in the following way:
In this case A=1, B=0 and the remaining parts are f and g. Our eigenvectors are unit vectors so the h function can be in the form:
The following functional equation will be solved n order to find \(c_1\) and \(c_2\):
In our case
The result is \(c_1\)=0 and \(c_2\)=0.
Plugging these values, now we are interested in the new equation:
Since \(P'(0)=1\) and \(P''(0)=-2k\ne 0\), we conclude that (0, 0) is semistable (unstable) if \(\lambda = 1\) (Fig. 1)
(v) if \(\lambda = 1+\frac{k}{\beta b}\) then the eigenvalues \(\lambda _1<1\) and \(\lambda _2=1\).
To use Center Manifold Theorem let \(x =H-(\frac{\lambda -1}{k})\) and \(y=P\).
The corresponding Jacobian Matrix is
We can rewrite our system of equations:
Following theorem will be used to find the h function.

The map P on the center manifold y = h(x)with k=2
Theorem 2
(Invariant Manifolds Theorem) [9], see also [10, 11] Suppose that \(F \in C^2\). Then there exist \(C^2\) stable \(W^s\) and unstable \(W^u\) manifolds tangent to \(E^s\) and \(E^u\), respectively, at \(X = 0\) and \(C^1\) center manifold \(W^c\) tangent to \(E^c\) at \(X = 0\). Moreover, the manifolds \(W^c\), \( W^s\), and \(W^u\) are all invariant.
Since invariant manifold is tangent to the corresponding eigenspace by Theorem 2, let us assume that the map h takes the form
Solving the functional equation:
we get
The new equation is:
\(P'(0)=1\) and \(P''(0)=-2k\ne 0\). So, the fixed point (\(\lambda -1\over k\), 0) when \(\lambda >1\) and \(\frac{(-1+\lambda ) b \beta }{k}=1\) is semistable (unstable) (Fig. 2).

The map P on the center manifold x = h(y) with \(\lambda = 3\), \(k = 2\), \(b = 0.5\), \(\beta = 2\)
2.2 Numerical Simulations for the Model 3
In this section numerical values are given to the parameters \(\lambda \), b, k and \(\beta \). According to these values coexistence fixed points are obtained approximately. And their stability behavior are investigated for these parameter values.
The coexistence fixed point can not be found explicitly. However it can be written as (\({\lambda y-1}\over {k y}\),\(\frac{log y}{-b} \)) for \(0<y<1\) where \(y= e^{-bP^*}\). And it exists if \(\lambda > 1+\frac{k}{\beta b}\). So, the following parameters are chosen in order to satisfy this condition.
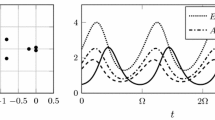
For the parameters \(\lambda =3\), \(b=0.4\), \(k =0.2\), \(\beta =0.3\) the system will be discussed. (0, 0) fixed point always exists. Since \(\lambda > 1\) the other fixed point \((\frac{\lambda -1}{k}, 0)\) will be taken into consideration, but it is unstable. Finally, there will be coexistence point \((H^*, P^*)\) when \(\lambda = e^{bP}+\frac{k P}{\beta (1-e^{-bP})}\). Although we can not solve it directly, using numerical approximation we get fixed point \((H^*, P^*)\approx (9.06, 0.43)\) which is locally stable (Fig. 3).

Plane diagrams and time series diagrams with the parameters \(\lambda = 3\), \(b = 0.4\), \(k = 0.2\), \(\beta = 0.3\) (Color figure online)
Next, the system will be discussed for the parameters \(\lambda =5\), \(b=0.7\), \(k =0.2\), \(\beta =0.3\) (0, 0) and \((\frac{\lambda -1}{k}, 0)\) are again unstable. For these parameter values, the coexistence fixed point is \((H^*, P^*)\approx (8.22,1.73)\) which is unstable (Fig. 4).

Plane diagrams and time series diagrams with the parameters \(\lambda =5\), \(b=0.7\), \(k =0.2\), \(\beta =0.3\) (Color figure online)
3 The Model with Allee Effect
Allee Effect is a causal relationship between the number of individuals in a population and their overall individual fitness [5]. Here just a simple idea works: “The more the merrier” [6]. The classical approach focuses on the intra specific competition. Because of the limited capacity and resources, if the population is small then each individual can get much more amount of resources. But the classical idea is lacking the term cooperation and the cost of rarity. If the population is too small, individuals have some difficulties on hunting, protecting themselves, foraging and even finding mates to reproduction. These difficulties are caused by lack of cooperation and can be thought as the cost of rarity [7].
Although there are many functions differ greatly in their ability to describe demographic Allee effects, for the Allee effect due to the mate limitation \(I(x)=\frac{sx}{1+sx}\), where s is an individual’s searching efficiency, is used. When Mate Limitation Allee Effect is added to the host population in the model we get:
3.1 Stability Analysis of Model (7)
Theorem 3
The system (7) has
(i) (0, 0) as non-negative fixed point for all values of parameters and always locally asymptotically stable.
(ii) two extra non-negative fixed points \((\frac{-k-s+\lambda s-\sqrt{-4 k s+(k+s-\lambda s)^2}}{2 k s}, 0)\) and
\((\frac{-k-s+\lambda s+\sqrt{-4 k s+(k+s-\lambda s)^2}}{2 ks}, 0)\) if \(\lambda >1\), \(s\ge 2 \sqrt{\frac{\lambda k^2}{(-1+\lambda )^4}}+\frac{k+\lambda k}{(-1+\lambda )^2}. \) The first one is unstable for all parameter values while the second one is locally asymptotically stable if \(b<\sqrt{\frac{k s}{\beta ^2}}, 2 \sqrt{\frac{k}{s}}+\frac{k+s}{s}<\lambda <\frac{b^2 \beta ^2+b \beta k+b \beta s+k s}{b \beta s}\).
(iii) two extra positive fixed points (coexistence type) which can not be found explicitly but can be written as:
\((\frac{-s-k l+\lambda s l-\sqrt{-4 k s l+(s+k l-\lambda s l)^2}}{2 k s l},\frac{log l}{-b})\) and \((\frac{-s-k l+\lambda s l+\sqrt{-4 k s l+(s+k l-\lambda s l)^2}}{2 k s l},\frac{log l}{-b})\) where \(l= e^{-bP^*}\), if \(\lambda >2 \sqrt{\frac{k}{s}}+\frac{k+s}{s}\), \(2 \sqrt{\frac{\lambda k s^3}{(k-\lambda s)^4}}+\frac{k s+\lambda s^2}{(k-\lambda s)^2}<l<1 \)
Proof. Consider the system (7). The fixed points of this system are the solutions of the following equations:
(i) (0, 0) is a solution obviously. At this point the jacobian matrix is:
\(\left( \begin{array}{cc} 0 &{} 0 \\ 0 &{} 0 \\ \end{array} \right) \). So it is stable [12].
(ii) Now for \(H\ne 0\) (8) can be written:
By letting \(P=0\), we find the other fixed points.
\((\frac{-k-s+\lambda s-\sqrt{-4 k s+(k+s-\lambda s)^2}}{2 k s}, 0)\), \((\frac{-k-s+\lambda s+\sqrt{-4 k s+(k+s-\lambda s)^2}}{2 ks}, 0)\) are other solutions. Both of them are positive for the parameter values \( k>0 \), \(\lambda >1\), \( s\ge 2 \sqrt{\frac{\lambda k^2}{(-1+\lambda )^4}}+\frac{k+\lambda k}{(-1+\lambda )^2} \)
By plugging \((\frac{-k-s+\lambda s-\sqrt{-4 k s+(k+s-\lambda s)^2}}{2 k s}, 0)\) to the matrix J we get:
The corresponding eigenvalues are \(\lambda _1=-\frac{b \beta \left( k+s-\lambda s+\sqrt{-4 k s+(k+s-\lambda s)^2}\right) }{2 k s}\) and \(\lambda _2=1+\frac{\sqrt{-4 k s+(k+s-\lambda s)^2}}{\lambda s}\).
\(\lambda _2>1\) for every values of parameters, so \((\frac{-k-s+\lambda s-\sqrt{-4 k s+(k+s-\lambda s)^2}}{2 k s}, 0)\) is unstable.
By plugging the other fixed point \((\frac{-k-s+\lambda s+\sqrt{-4 k s+(k+s-\lambda s)^2}}{2 ks}, 0)\) to the J we get:
\(\lambda _1=1-\frac{\sqrt{-4 k s+(k+s-\lambda s)^2}}{\lambda s}\) and \(\lambda _2=\frac{b \beta \left( -k+(-1+\lambda ) s+\sqrt{-4 k s+(k+s-\lambda s)^2}\right) }{2 k s}\). \(|\lambda _1,2|<1\) if \(s>0, k>0, \beta >0, 0<b<\sqrt{\frac{k s}{\beta ^2}}, 2 \sqrt{\frac{k}{s}}+\frac{k+s}{s}<\lambda <\frac{b^2 \beta ^2+b \beta k+b \beta s+k s}{b \beta s}\)
(iii) Finally, if \(H\ne 0\) and \(P\ne 0\) letting \(l= e^{-bP^*}\),
\((\frac{-s-k l+\lambda s l-\sqrt{-4 k s l+(s+k l-\lambda s l)^2}}{2 k s l},\frac{log l}{-b})\) and
\((\frac{-s-k l+\lambda s l+\sqrt{-4 k s l+(s+k l-\lambda s l)^2}}{2 k s l},\frac{log l}{-b})\) are fixed points.
To be positive \(s>0\), \(k>0\), \(\lambda >2 \sqrt{\frac{k}{s}}+\frac{k+s}{s}\), \( 2 \sqrt{\frac{\lambda k s^3}{(k-\lambda s)^4}}+\frac{k s+\lambda s^2}{(k-\lambda s)^2}<l<1 \)
3.2 Numerical Simulations for the Model 7
For the parameters \(\lambda =3\), \(b=0.4\), \(k=0.2\), \(\beta =0.3\), s=5 the system will be discussed. These parameters are chosen because for these values the only stable fixed point is one of the coexistence cases. When we solve this system approximation methods there exists different non-zero results according to the given neighbourhood of the solution. Some of them are (\(9.69687,-1.35339\times 10^{-15}\)), (\(0.103126,2.19998\times 10^{-18}\)) and (8.93, 0.35). The first two are in fact corresponds to (H, 0), because of solving it with approximation method it gives these results with an error.
The positive fixed point, that is approximately (8.93, 0.35), is locally asymptotically stable for these parameter values (Fig. 5).

Plane diagrams and time series diagrams with the parameters \(\lambda =3\), \(b=0.4\), \(k=0.2\), \(\beta =0.3\), s=5 (Color figure online)
Next, the system behavior will be discussed for \(\lambda =5\), \(b=0.7\), \(k =0.2\), \(\beta =0.3\), s=5. (H, 0) cases are unstable as well as the coexistence case (8.11, 1.69) is unstable again this time (Fig. 6).

Plane diagrams and time series diagrams with the parameters \(\lambda =5\), \(b=0.7\), \(k =0.2\), \(\beta =0.3\), s=5 (Color figure online)
4 The Model with Host Refuge
Refuge Effect is another mechanism that makes the model more realistic. When we are talking about competitive, prey- predator or host-parasitoid models, a simple question arises: “Are there some individuals protecting themselves from the damage given by other species by sheltering ?” If the answer is yes, then Refuge Effect should be added to the model. Refuge effect refers to the reality that a proportion of the prey, host or the competitors can have the state of being safe or sheltered from pursuit, danger, or difficulty. The environment is not perfectly uniform and heterogeneity of the environment is the main cause of the Refuge Effect. Part of the argument is that refuges serve as sites for maintaining vulnerable species that might otherwise become extinct. Such sites also indirectly benefit the exploiting species since a constant spillover of victims into the unprotected areas guarantees a constant food source [8].
Now, if the refuge effect is added to the model that part of the host (insect) population may be less exposed and thus less vulnerable to attack. The refuge effect is added to the model (7) as a proportion to make it simpler. A fraction \(1-d \) within the host refuge the resulting model is:
4.1 Stability Analysis of Model (11)
Theorem 4
The system (11) has
(i) (0, 0) as non-negative fixed point for all values of parameters which is locally asymptotically stable if \(\lambda < 1\).
(ii) (\(\lambda -1\over k\), 0) as a non-negative locally asymptotically stable fixed point if \(1<\lambda < 1+\frac{k}{\beta b}\)
(iii) \((-\frac{k+k y-\lambda k y-\sqrt{4 k^2 y (-1+\lambda -\lambda d+\lambda d y)+(-k-k y+\lambda k y)^2}}{2 k^2 y},\frac{log y}{-b})\) as the coexistence fixed point where \(y= e^{-bP^*}\)
Proof: (i), (ii) It is obvious that when P = 0 (in the absence of parasitoid the refuge effect is not meaningful. When there is no parasitoid there will be no refuge as well. As a result the model will show the same properties with the model 7.
(iii) The refuge effect has meaning and importance only in the coexistence case. Letting again \(y=e^{-bP^{*}}\), one can find the coexistence fixed points.
\((-\frac{k+k y-\lambda k y-\sqrt{4 k^2 y (-1+\lambda -\lambda d+\lambda d y)+(-k-k y+\lambda k y)^2}}{2 k^2 y},\frac{log y}{-b})\) is positive in the condition \(\lambda >\frac{1}{1-d+d y}\) in addition to positive parameters with \(0<y<1\) and \(0<d<1\).
On the other hand, under the condition positive parameters and \(0<y<1\) and \(0<d<1\), \((-\frac{k+k y-\lambda k y+\sqrt{4 k^2 y (-1+\lambda -\lambda d+\lambda d y)+(-k-k y+\lambda k y)^2}}{2 k^2 y},\frac{log y}{-b})\) can not be positive.
4.2 Numerical Simulations for the Model 11
For the parameters \(\lambda =10\), \(b=0.4\), \(k =0.2\), \(\beta =0.3\), \(d=0.2\) the system will be investigated. Here, \(\lambda \) is chosen bigger than the other numerical simulations because the coexistence fixed point condition (\(\lambda >\frac{1}{1-d+d y}\)) is difficult to hold otherwise. According to these parameter values there will be coexistence point \((H^*, P^*)\approx (44.84, 0.37)\) which is locally stable sink (not spiral this time) (Fig. 7).

Plane diagrams and time series diagrams with the parameters \(\lambda =10\), \(b=0.4\), \(k =0.2\), \(\beta =0.3\), \(d=0.2\) (Color figure online)
Next giving values \(\lambda =10\), \(b=0.7\), \(k =0.2\), \(\beta =0.3\), \(d=0.2\) the system will be discussed. Here, \((H^*, P^*)\approx (42.78,1.88)\) which is locally stable (spiral this time) (Fig. 8).

Plane diagrams and time series diagrams with the parameters \(\lambda =10\), \(b=0.7\), \(k =0.2\), \(\beta =0.3\), \(d=0.2\) (Color figure online)
5 Discussion
In this paper a discrete-time density dependent host parasitoid model is analyzed. Classical approach of density dependence brings intraspecific competition to the model. Because all the resources are limited, there should be capacity constraint and a decreasing growth rate function. On the other hand, when population is already small then limited resources is not a problem anymore but the problem is the individuals will have difficulties on hunting, protecting themselves, foraging and even finding mates to reproduction. We add mate limitation Allee effect to the model and analyze it in this work. Moreover, since homogeneous environment assumption is not realistic, Refuge effect is added. The further work may be about adding both effects at the same time.
With this work, we conclude that (0, 0) is stable for model (3) when growth rate is small (\(\lambda <1\)) while for model (7) it is locally asymptotically stable for all parameter values. In this model if the population of host is small enough at the moment, then it will go to extinction even if the growth rate \(\lambda \) is big. Indeed this situation is caused by the strong Allee Effect. Note that some authors make a distinction between strong Allee effect and weak Allee effect: a strong Allee effect refers to a population that exhibits a critical size or density below which population declines to extinction and above which it survives. Here, when the host population is small, it goes to 0 eventually. As a result parasitoids become extinct, too. That is why (0, 0) is locally stable whatever the parameter values are.
For Both Model (3) and (7), under some conditions on parameters, hosts population can be positive when parasitoid population is 0. For this situation growth rate is neither big nor small indeed there will be survivor insects but their number is not enough to feed their parasitoids. Again for both models coexistence cases are possible but the stability changes according to the parameters.
Finally for model 11, since no parasitoid means no refuge we can simply use model 3 for both local and global stability when there is no parasitoid. That is why without doing any extra calculations we use the same results with model 3.
Otherwise mathematically we can show that there is coexistence case. But finding it numerically with approximation methods is difficult because of the condition \(\lambda >\frac{1}{1-d+d y}\) that is needed to be positive. We should choose bigger \(\lambda \) values than the other models in order to be satisfied this condition. It is biologically meaningful because already some proportion of the host population can not be attacked because of the refuge effect, if in addition to this, growth rate is small then for parasitoid it is difficult to find host to feed on them. When there is coexistence case, since some host sheltered from the pursuit of parasitoid, we will have bigger host population in the fixed point.
References
Wang, Y.H., Gutierrez, A.P.: An assessment of the use of stability analyses in population ecology. J. Anim. Ecol. 49, 435–452 (1980)
May, R.M., Hassell, M.P., Anderson, R.M., Tonkyn, D.W.: Density dependence in host-parasitoid models. J. Anim. Ecol. 50, 855–865 (1981)
Sophia, R., Jang, J., Jui-Ling, Y.: A Discrete Time Host-Parasitoid Model. In: Proceedings of the Conference on Differential & Difference Equations and Applications, pp. 451–455 (2006)
Elaydi, S.: Discrete Chaos: With Applications in Science and Engineering, 2nd edn. Chapman and Hall/CRC, Boca Raton (2008)
Allee, W.C., Emerson, A.E., Park, O., Schmidt, K.P.: Principles of Animal Ecology. WB Saunders, Philadelphia (1949)
Courchamp, F., Beree, L., Allee, J.: Effects in Ecology and Conservation. Oxford University Press, Oxford (2008)
Scheuring, I.: Allee effect increases the dynamical stability of populations. J. Theor. Biol. 199, 407–414 (1999)
Edelstein-Keshet, L.: Mathematical Models in Biology. Random House, New York (1988)
Guzowska, M., Lus, R., Elaydi, S.: Bifurcation and invariant manifolds of the logistic competition model. J. Differ. Eqn. Appl. 17, 1851–1872 (2011)
Karydas, N., Schinas, J., Karydas, N., Schinas, J.: The center manifold theorem for a discrete system. Appl. Anal. 44, 267–284 (1992)
Marsden, J., McCracken, M.: The Hopf Bifurcation and Its Application. Springer-Verlag, New York (1976)
Kulenovica, M.R.S., Nurkanovic, M.: Global asymptotic behavior of a two dimensional system of difference equations modeling cooperation. J. Differ. Eqn. Appl. 9(1), 149–159 (2003)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Kulahcioglu, B., Ufuktepe, U. (2016). A Density Dependent Host-Parasitoid Model with Allee and Refuge Effects. In: Gervasi, O., et al. Computational Science and Its Applications -- ICCSA 2016. ICCSA 2016. Lecture Notes in Computer Science(), vol 9788. Springer, Cham. https://doi.org/10.1007/978-3-319-42111-7_18
Download citation
DOI: https://doi.org/10.1007/978-3-319-42111-7_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-42110-0
Online ISBN: 978-3-319-42111-7
eBook Packages: Computer ScienceComputer Science (R0)