
Abstract
Rescue robots have been used in at least 28 disasters in six countries since the first deployment to the 9/11 World Trade Center collapse. All types of robots have been used (land, sea, and aerial) and for all phases of a disaster (prevention, response, and recovery). This chapter will cover the basic characteristics of disasters and their impact on robotic design, and describe the robots actually used in disasters to date, with a special focus on Fukushima Daiichi, which is providing a rich proving ground for robotics. The chapter covers promising robot designs (e. g., snakes, legged locomotion) and concepts (e. g., robot teams or swarms, sensor networks), as well as progress and open issues in autonomy. The methods of evaluation in benchmarks for rescue robotics are discussed and the chapter concludes with a discussion of the fundamental problems and open issues facing rescue robotics, and their evolution from an interesting idea to widespread adoption.

Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others



Keywords
- Unmanned Aerial Vehicle
- Situation Awareness
- Autonomous Underwater Vehicle
- World Trade Center
- Snake Robot
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
Robots serve as extensions of emergency professionals. During the immediate response to a disaster, robots can provide real-time data about the event and perhaps even directly aid in inserting mitigation devices and sensors, turning valves, and moving equipment. As the immediate life-saving and stabilization phase of the disaster ends, robots can help with the economic recovery. Robots for disaster are an emerging technology, and have not yet been widely adopted by the international emergency response community. However, as of 2012, they have been used in 28 disasters in Cyprus, Haiti, Italy, Japan, New Zealand, and the United States primarily for mining disasters and structural collapses or infrastructure damage. Robots have been used for hazardous materials accidents, often referred to as chemical, biological, nuclear, radiological, or explosive (GlossaryTerm
CBRNE
) events, most recently the Fukushima Daiichi nuclear accident. Both structural and CBRNE events are generally handled by urban search and rescue teams unless an industry-specific team assumes command. As a result of the breadth of the term urban search and rescue contributes to a misperception that disaster robotics is limited to urban or constructed environments. For example, although technically an urban event, wilderness search and rescue is often conducted by a local urban search and rescue team. In general, disaster robotics connotes extraordinary situations requiring special operations; fire fighting is not considered as part of disaster robotics as it is a routine emergency.Disaster robotics can contribute to broad area activities, local incidents, and routine emergencies, though this chapter will focus on the use of robots for disaster events. Interest in robotics for surveying wildland fires and flooding is emerging, and the few documented uses of robots are reported in this chapter. Robots are also being increased use in local incidents which do not qualify as true disasters. For example, several fire rescue departments in Japan and the United Kingdom routinely use small underwater robots for water-based search and recovery of drowned victims and the interest in the use of aerial vehicles for wilderness search and rescue is growing.
Disaster robots have not been widely adopted, but their use is increasing as the technology matures. The general lack of adoption is to be expected since the technology is new and the concept of operations for these novel technologies take time to evolve. Rescue applications are often similar enough to military operations that the same platforms can be adapted; however, some tasks are significantly different than their military counterpart, some are unique to rescue, and the human–robot interaction for civilian response diverges from military patterns of use.
1 Overview
Disaster response is always a race against time, to move as fast as possible to reach all potential survivors and yet move slowly enough to avoid creating additional collapses, damage, risk to rescuers and victims, or contention over airspace. The primary motivation is to save lives; robots can assist in meeting this goal either by interacting directly with victims or structures or automating support activities.
1.1 Motivation
Disasters are defined as a discrete meteorological, geological, or manmade event, that exceeds local resources to respond and contain. Disasters are distinct from an ongoing condition such as global warming. In practice, a disaster means that an agency has to engage additional specially trained experts and equipment. For example, a chemical spill may be routine and handled with existing personnel trained in hazardous materials or it may be horrific, such as the 1984 Bhopal disaster that killed thousands of people.
Disaster activities are often referred to by phases, though there is no single accepted model in emergency management. After an event, public officials are responsible for the life-saving response and economic recovery activities focused on maximizing benefit to the largest population. Nongovernmental agencies may join with other officials and citizens in humanitarian relief efforts which are generally focused on benefiting individuals. Emergency professionals are also tasked with prevention of disasters and preparation should there be sufficient warning.
Disaster response activities are typically executed by the urban search and rescue (GlossaryTerm
USAR
) task force within a fire rescue agency who work with law enforcement, transportation officials, and others. USAR is often used synonymously with any response activity. The term urban can be misleading as it sounds like it is restricted to building collapses. USAR includes hazardous material response, as these materials most certainly have something to do with built structures. USAR includes wilderness search and rescue which often involves searching tunnels and abandoned mines, avalanches, not just locating lost hikers. It also includes water-based search and rescue which deals with saving victims of floods or high currents (also known as swift water rescue) or in the aftermath of traffic accidents where victims are trapped in cars that have plunged into a river or bay. Water-based search and rescue does not necessarily have urban structures but there is a similarity of rescue techniques and re-use of equipment.Historically, disaster robotics concentrated on the response phase of a disaster. The disaster robotics community began to form in 1995 as the outcome of the tragic loss of life in the Hanshin–Awajii earthquake in Kobe, Japan, and the bombing of the Murrah Federal Building in Oklahoma City, United States [60.1, 60.2]. In both cases, it was easy to imagine how small ground robots may have been able to enter rubble to find trapped victims. As a result, research efforts began in individual laboratories. Two mobile robot competitions (the GlossaryTerm
AAAI
(Association for the Advancement of Artificial Intelligence) mobile robot competition in the United States, and the RoboCup rescue league internationally) were started in the late 1990s to engage the scientific community in rescue research. The first use of robots for response was at the 2001 World Trade Center (GlossaryTermWTC
) disaster, where ground robots were used to penetrate the deeply packed rubble. Since then robots have been used for response to earthquakes, hurricanes, mine collapses, bridge collapses, explosions, and flooding.The deployment of disaster robots during the response phase offers many potential benefits. The 2010 World Disasters report [60.3] suggests just how many lives have been, and will be, impacted by urban disasters. Over 1.1 million people were reported killed from 2000 to 2009, with the total amount of disaster-related damage estimated at 986.7 billion US dollars. Of the victims in urban disasters, only a small fraction may actually survive. Consider from [60.4, 60.5] that the majority of survivors (80 %) of urban disasters are surface victims, that is, the people lying on the surface of the rubble or readily visible. However, only 20 % of survivors of urban disasters come from the interior of the rubble, yet the interior is often where the majority of victims are located, providing motivation for robots that can explore deep within collapses. The mortality rate increases and peaks after 48 h, meaning that survivors who are not extricated in the first 48 h after the event are unlikely to survive beyond a few weeks in the hospital.
However, disaster robotics is no longer focused on response but has expanded to recovery. Recovery activities consist of extricating any remaining bodies of victims, re-establishing normal operations in the community, continuity of government, and resumption of the economy. The activities are typically carried out by various local, provincial, state, and federal agencies as well as insurers and banks. Each municipality may have different priorities in rebuilding schools, hospitals, ports, and industry and there is usually no centralized authority.
The benefits of disaster robotics for the recovery phase were seen in the ongoing aftermath of 2011 Tohoku earthquake and related Fukushima Daiichi nuclear accident. The tsunami generated by the earthquake swept thousands of people into the sea. It also severely damaged many fishing ports and scattered debris and pollutants throughout fishing areas. Teams of roboticists used underwater robots to search for victims and to help re-open ports and clear fishing beds. The decommissioning of the Fukushima Daiichi facility will make use of robots, possibly some of those used in the response.
Disaster robotics is also addressing prevention and preparedness. As with recovery operations, prevention and preparedness activities are similarly distributed among many groups. It should be noted that the fire rescue and law enforcement teams will be the first responders and whatever equipment they use locally will be likely to be used at a disaster. Therefore, the disaster robotics community has begun pushing for the adoption of robots into daily use by fire rescue and bomb squads so that the responders will be familiar and comfortable with the technology [60.6]. A lesson from Fukushima was that robots built by the nuclear industry in the aftermath of Chernobyl and Three Mile Island had not been used in decades, with no one expert in their use.
1.2 Disaster Robot Tasks
While the overall motivation for rescue robotics is to save lives, the motivation for specific robot designs and capabilities depend on their potential tasks. The types of tasks that have been proposed for rescue robots are described below. Some of the above tasks are similar to tasks for military robots, especially search and reconnaissance and mapping, but many are unique or have a different flavor. For example, structural inspection, rubble removal, and adaptively shoring rubble are rescue specific. Tasks such as casualty extraction appear to be similar but are significantly different. Consider that a wounded soldier is unlikely to have a spinal cord injury and is likely to be in a space large enough for a human to work in, so a robot entering the area and dragging the soldier to safety is appropriate. However, a crushed victim of a building collapse is physically trapped or pinned in a small space, requiring rubble removal, and the victim’s spinal cord must be immobilized before extraction; clearly victim extraction in the search-and-rescue domain is more challenging.
Search is a concentrated activity in the interior of a structure, in caves or tunnels, or wilderness and aims to find a victim or potential hazards. The motivation for the search task is speed and completeness without increasing risk to victims or rescuers.
Reconnaissance and mapping is broader than search. It provides responders with general situation awareness and creates a reference of the destroyed environment. The goal is speedy coverage of a large area of interest at the appropriate resolution.
Rubble removal can be expedited by robotic machinery or exoskeletons. The motivation is to move heavier rubble faster than could be done manually, but with a smaller footprint than that of a traditional construction crane.
Structural inspection may be either conducted on the interior (e. g., to help rescuers understand the nature of the rubble in order prevent secondary collapses that may further injure survivors) or on the exterior (e. g., to determine whether a structure is safe to enter). Robots provide a means of getting structural sensor payloads closer and in far more favorable viewing angles.
In situ medical assessment and intervention are needed to permit doctors and paramedics to interact verbally with victims, visually inspect the victim or apply diagnostic sensors, or to provide life support by transporting fluids and medication through narrow tubing. The objective is to provide telepresence for medical personnel during the 4–10 h that it usually takes to extricate a victim [60.4, 60.5]. The lack of medical intervention was a major problem at the Oklahoma City bombing [60.7]. Preliminary work has been conducted for victim management, most notably in telemedicine (also called medical reachback) [60.8], general assessment and triage [60.9], and comforting trapped victims as per the Survivor Buddy project [60.10].
Medically sensitive extrication and evacuation of casualties may be needed to help provide medical assistance while victims are still in the disaster area, also known as the hot zone. In the case of a chemical, biological, or radiological event, the number of victims is expected to exceed the number that can be carried out by human rescuers in their highly restrictive protective gear; this makes robot carriers attractive. Since medical doctors may not be permitted inside the hot zone, which can extend for kilometers, robot carriers that support telemedicine may be of huge benefit. Removing survivors, particularly from a hazardous material event where there may be many people immobilized or disoriented is another area that is getting increasing attention. The US Army Telemedicine and Advanced Technology Research Center has been leading initiatives in robots such as the Vecna BEAR for autonomous casualty extraction [60.11]. Other efforts such as those by Yim and Laucharoen [60.12] have focused on civilian casualty extraction which requires stabilization of the spine.
Acting as a mobile beacon or repeater to extend wireless communication ranges, enable localization of personnel based on radio signal transmissions by providing more receivers, and to serve as landmarks to allow rescuers to localize themselves. Active or passive transponders such as wireless sensor nodes and GlossaryTerm
RFID
s (radio-frequency identification) can be deployed in the field. They can also be used to support the localization of personnel, but even more to leave mission-related data such as the location of nearby victims and hazards in the field [60.13].Serving as a surrogate for a team member, such as a safety officer or a logistics person. In this task, the robot works side-by-side with rescuers, for example, a group breaching rubble deep within the interior of a disaster may have difficulty using a radio to request additional resources because of noise. However, a team member outside of the rubble can see and hear through the robot the state of progress and anticipate needs. The objective is to use robots to speed up and reduce the demands of tasks, even if they are done by humans.
Adaptively shoring unstable rubble to expedite the extrication process. Rubble removal is often hindered by the need to adopt a conservative pace in order to prevent a secondary collapse that might further injure a trapped survivor.
Providing logistics support by automating the transportation of equipment and supplies from storage areas to teams or distribution points within the hot zone.
1.3 Types of Disaster Robots
Rescue robots are needed to help quickly locate, assess, stabilize, and extricate victims who cannot be easily reached. They typically do this by extending the rescuers’ ability to see and act. On the ground, small unmanned ground vehicles (GlossaryTerm
UGV
s) can enable rescuers to find and interact with trapped victims in voids that are too small or too dangerous for human or canine entry. Large UGVs can accomplish tasks such as removing large rubble faster than humans. In the air, unmanned aerial vehicles (GlossaryTermUAV
s) robots extend the senses of the responders by providing a bird’s eye view of the situation. In the water, unmanned marine vehicles (GlossaryTermUMV
s), either underwater vehicles (GlossaryTermUUV
s) or surface vehicles (GlossaryTermUSV
s) robots can similarly extend and enhance the rescuers’ senses.Rescue robots can be broadly categorized into types based on modality and size [60.14], though other taxonomies that mix modality, size, and task have been proposed [60.15]. There are three modalities of robots: ground, aerial, and marine. The modality impacts on the basic design and capabilities of the robot. Within each modality, rescue robots can be further described as one of three sizes: man-packable, man-portable, and maxi. The size of the robot impacts both on the tasks for which it is suited and how soon after a disaster it might be used. In order to be man-packable, the entire robot system, including the control unit, batteries, and tools, must fit into one or two backpacks. Man-packable robots are more likely to be used immediately after a disaster since they can be carried by responders over debris and up and down ladders into the core of the disaster, while larger equipment must wait for paths to be carved out. The next larger size is man-portable; these are robots that can be carried a short distance by two people or on a small all-terrain vehicle. Man-portable robots function in human-sized spaces such as mine tunnels. They can be used as accessibility within the hot zone improves or outside the hot zone for logistics support. Maxi-sized robots require trailers or other special transportation logistics. This inhibits their insertion into the hot zone.
Aerial rescue robots represent the most advanced robotics technology in use, and new concepts continue to emerge. Aerial vehicles can be further subdivided into fixed wing (plane-like), rotary wing (helicopters), lighter-than-air (blimp), and tethered (kite) platforms. Fixed-wing UAVs typically travel long distances and can circle points of interest, while rotary-wing platforms can hover and require a small area to launch and land. Lighter-than-air vehicles may be tethered, similar to a kite. Underwater vehicles may also be subdivided into tethered and untethered platforms.
Large unmanned helicopters, such as the Yamaha R-Max, continue to be adapted for commercial rescue-and-recovery missions, including carrying heavy payloads capable of estimating the amount of rubble and debris generated by a disaster. Small fixed-wing platforms for tactical military use may have great benefit to the response community. However, UAVs are drawing the attention of agencies that control airspace and may become heavily regulated in the future. For example, the small UAV used at Haiti in 2010 flew in violation of airspace restrictions.
2 Disaster Characteristics and Impact on Robots
The type of disaster as well as the general pattern of activity influence the choice of robot platforms and payloads.
2.1 Natural Disasters
Natural disasters, such as earthquakes, tsunamis, hurricanes and typhoons, volcanoes, avalanches, landslides, and floods, present many challenges for rescue robots. Natural disasters are usually geographically distributed, perhaps affecting a 200 km or more radius around the epicenter of the event. The sheer size of the affected area presents many challenges to the emergency response. The primary impact of natural disasters is on residences, light commercial buildings, sea walls and canals, and transportation and communications infrastructure. This implies that rescuers have thousands of structures to check quickly for survivors, but those structures will be fairly small and amenable to manual and canine search. Besides the sheer volume of structures to check, communication disruptions prevent rescuers from getting timely information as to the state of transportation access and the general needs of an area. However, designing robots to meet these challenges is important because natural disasters provide the most hope of a large number of survivors. Uninjured survivors may simply be stranded and can survive for up to 72 h. Natural disasters have generally favored a bird’s eye view from a UAV invaluable in establishing situation awareness or UMVs in determining hidden conditions of critical transportation, power, and communication infrastructure.
2.2 Manmade Disasters
In comparison to natural disasters, manmade disasters (such as a terrorist bombing or an industrial accident) occur in a small area, though may have significant wide-area impacts (e. g., radiation, chemical release). The challenge is often not how to see the entire external extent of the damage, but rather to see what is not visible: the interior of the rubble, the location and condition of survivors, the state of potentially dangerous utilities (e. g., electricity, gas lines) [60.14, 60.16, 60.17], and hazardous conditions such as radiation [60.18]. The communications and power infrastructure usually exist within a 10 km range and cell phones generally work outside of the directly affected area. Voids in the rubble may be irregular in shape and vertical in orientation. Wireless communications in the interior of the rubble are unpredictable, and generally nonexistent due to the large amount of steel within commercial structures, but the combination of irregular voids and sharp rubble do not favor the use of fiber optic cables. Visibility is difficult as there is no lighting and everything may be covered with layers of gray dust, further hampering recognition of victims, potential hazards, or accurate mapping. The interiors may be wet or contain standing water due to water lines, sewers, and sprinkler systems. Survivors are more likely to be in dire need of medical attention. Small ground robots that can enter deep into the interior of the rubble have been used most frequently for structural collapses, mid-sized robots for CBRNE events, and large, intrinsically safe robots for mine collapses.
2.3 General Pattern of Activity During the Response Phase
In order to understand how to apply robotics to disaster response (as opposed to recovery or prevention and preparedness), it is helpful to understand the general pattern of activity, which can be summarized as [60.19, 60.20]:
-
1.
Responders become aware of the existence of victims. This awareness may be generated by information from family, neighbors, and colleagues, an understanding of demographic patterns (e. g., at night, apartment buildings will be heavily occupied, while during a work day, office buildings will be occupied), or by a systematic search.
-
2.
The response command staff attempt to understand the disaster site. They investigate the site for conditions such as hazardous materials, the risk posed to the rescuers themselves, any pending threats to trapped victims, and resource restrictions such as barriers to transporting resources to the site, nearby usable equipment and materials that can be exploited, and any other barriers to a timely rescue.
-
3.
The command staff plans the operations.
-
4.
Search and reconnaissance teams are sent to map the situation and assess environmental conditions. Accurate estimates of the need for emergency medical intervention are highly desirable in order to optimize allocation of medication personnel in the field and to prepare ambulances and hospitals. (In the case of the Kobe earthquake, this stage took the longest time [60.19].)
-
5.
Excavation of rubble to extract victims begins. Note that removal of rubble in search and rescue differs from construction removal of rubble, because the safety of the victims is the top priority.
-
6.
Responders gain access to victims and apply emergency medicine in situ.
-
7.
Victims are transferred to hospitals.
-
8.
Field teams report activities periodically, usually at the end of the shift, and the command staff modifies or replans accordingly.
3 Robots Actually Used at Disasters
Small land, aerial, or marine vehicles have been used at 28 disasters and numerous local events, starting with the first use of UGVs at the 2001 World Trade Center collapse, see Table 60.1. The majority, 16, have taken place in the United States, followed by Japan (3), Italy (3), New Zealand (2), Haiti (1), Thailand (1), Cyrus (1), and Canada (1). The May 2013 rescue by a UAV guiding searchers to an injured motorist who had wandered from his car in Canada is the first reported live save of a person by a robot. However, as noted earlier, directly saving lives is not the only motivation for a robot. Robots have received in general high marks for completing their missions. Table 60.1 shows 37 reported deployments of robots for a disaster or well-known local incident. The deployments are grouped by major general disaster type of event: meteorological (e. g., hurricane, earthquake), geological event (e. g., earthquake, tsunami), man-made (e. g., terrorism, industrial accident), or mining (either due to a geological or a man-made event). Mine and manmade disasters are most frequent, followed by geological and meteorological events. In 7 of the 37 events, robots were present but were not used or could not reach the area of interest and thus considered not successful. UGVs have been used most frequently, followed by UAVs, and UMVs. While the USA initially led in reported adoptions, Europe and Asia are beginning to deploy robots. This section discusses the deployments by the four disaster types, while the following section highlights the 2011 Fukushima Daiichi nuclear accident as it highlights the types of robots, missions, and challenges posed during both the response and recovery phases of a disaster.
3.1 Meteorological Events
Robots were used at six meteorological events and were successful at five:
-
2005 Hurricane Katrina (USA), where an Inuktun ASR Xtreme UGV [60.21], an Aerovironment Raven fixed wing UAV and a Like90 helicopter UAV, and a Silver Fox fixed wing UAV were used during the initial response phase for search, reconnaissance and mapping, and structural inspection [60.22]. Later an iSENSYS IP3 was used for structural inspection during the recovery phase [60.23]. The UGV searched an apartment building unsafe for human entry and the UAVs surveyed areas inaccessible by car. The two UAVs used during the response are shown in Fig. 60.1 – a battery-powered fixed-wing and a battery-powered rotary-wing (a Like90 T-Rex miniature helicopter modified for stability in high winds) UAVs.
Fig. 60.1a,b 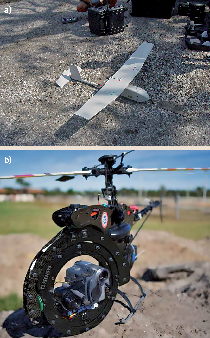
Man-packable UAVs used to search portions of Mississippi during the hurricane Katrina response: (a) an Aerovironment Raven fixed-wing UAV and (b) an iSENSYS IP3 rotary-wing UAV (courtesy of CRASAR)
-
2005 Hurricane Wilma, Ft. Myers, Florida (USA), where an AEOS unmanned marine surface vehicle (Fig. 60.2) and an iSENSYS T-Rex unmanned aerial vehicle were used independently and cooperatively, to assist with the recovery phase for structural inspection of buildings, docks, and piers [60.24]. The robots provided useful information but the USV experienced significant wireless communications and GlossaryTerm
GPS
(global positioning system) signals near and underneath largeFig. 60.2 
Unmanned surface vehicle exploring the bridge to Marco Island, Florida (courtesy of CRASAR)
-
2006–2010 California wildfires (USA), where the National Aeronautics and Space Administration Ikhana Global Hawk was used to provide reconnaissance and mapping of 57 fires [60.25]. Ikhana was primarily used to gather data to develop new payloads but did contribute in 2010 to tactical response.
-
2008 Hurricane Ike, Rollover Pass Bridge, Texas (USA), where an AEOS unmanned marine surface vehicle, a VideoRay remotely operated vehicle (GlossaryTerm
ROV
), and a YSI Oceanmapper autonomous underwater vehicle (GlossaryTermAUV
) were used for structural inspection of the Rollover Pass bridge [60.26]. The USV was able to confirm the lack of scour around the pilings while the VideoRay could not be controlled in the high currents and the YSI AUV could not accurately preplan its path without colliding with the structure. -
2011 Thailand floods (Thailand), where two unmanned UAVs provided reconnaissance and mapping of flood plains, allowing officials to concentrate evacuation or shoring efforts during the prevention and preparedness phases [60.27]. The UAVs are credited with mitigating damage to Bangkok and loss of life.


UGVs were present at 2004 Hurricane Charley (USA) but not used for the house-to-house inspection tasks that made up the bulk of ground operations [60.28].
3.2 Geological Events
Robots have been used at eight geological events (6 earthquakes, 1 landslide, 1 tsunami). They were successful at seven events:
-
2004 Niigata–Chuetsu Earthquake, where a variant of the Soryu III snake robot was used for search in collapsed houses. The snake robot was able to move into constricted passageways. Figure 60.3 shows the robot on site.
Fig. 60.3 
IRS Soryu robot searching a house destroyed by the Niigata–Chuetsu earthquake (courtesy IRS)
-
2009 L’aquila earthquake, L’aquila (Italy), where a customized AscTec quadrotor UAV was used for structural inspection. The UAV was able to fly successfully close to buildings and windows.
-
2010 Haiti earthquake (Haiti), where a SeaBotix LBV ROV was used for underwater reconnaissance and mapping of debris in shipping lanes and an Elbit Skylark UAV was used for reconnaissance and mapping of orphanages. Both the robots provide valuable information.
-
2011 Christchurch earthquake, Christchurch (New Zealand), where an iRobot Packbot UGV and a Parrot AR.drone UAV were used for structural inspection of the Christchurch catholic cathedral [60.29]. The Packbot was successful but the UAV’s camera did not face upward and the ceiling could not be examined.
-
2011 Tohoku earthquake, Sendai (Japan), where a KOHGA3 and Quince UGVs (Fig. 60.4) and a Kenaf and Quince UGVs were used cooperatively with a Pelican UAV [60.30] (Fig. 60.5) for structural inspection of damaged buildings. The robots were able to provide information to structural engineers.
Fig. 60.4a–c 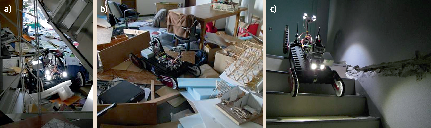
Investigation of damaged building by Quince
Fig. 60.5 
(a) Docking system of Quince and Pelican, and (b) 3-D (three-dimensional) map measurement by collaboration
-
2011 Tohoku tsunami (Japan), where nine UMVs were used for reconnaissance and mapping, and victim recovery during the recovery phase. Five different teams deployed UMV: A SeaBotix SARbot, SeaBotix LBV-300, SeaMor, and Access AC-ROV were deployed by a joint IRS-CRASAR team in April 2011 and later again in October adding a YSI Oceanmapper [60.31]; the IRS-CRASAR team was credited with reopening the port of Minamisanriku. Ura from Tokyo University fielded an unnamed ROV which recovered two dead bodies from an undisclosed location [60.32]. Prof. Shigeo Hirose at Tokyo Institute of Technology also created an experimental ROV and deployed with the Japanese Ground Self-Defense Forces [60.32]. IDEA Consultants (Japan) deployed their Mitsui ROV. Shibuya Diving Industry bought and used a VideoRay Pro 4, though the extent of the use is not known [60.33]. All UMVs were ROVs with the exception of the YSI Oceanmapper.
-
2012 Finale Emilia earthquake (Italy), where two custom unmanned aerial vehicles and two UGVs were used at Mirandola, Italy, for structural inspection of the exteriors and interiors of two churches that had not been entered due to safety reasons [60.34] (Fig. 60.6). The robots were able to provide information to the Italian National Fire Corps and state archaeologistics.
Fig. 60.6a–c 
Finale Emilia earthquake: (a) the UGV platform deployed in the destroyed cathedral. (b) Reconstruction of the cathedral from laser measurements, (c) and image data




An Inunktun VGTV Xtreme UGV was unsuccessfully deployed at the La Conchita mudslide to search for possible survivors in houses collaterally damaged by the mudslide [60.35]. The robot failed on its two runs within two minutes and four minutes, respectively, due to severe mud and thick shag carpeting.
3.3 Manmade Events
Robots were at nine manmade events. They were successful at eight events:
-
2001 World Trade Center collapse (USA) [60.36], where Inuktun Micro-Tracks, Inuktun Micro-VGTV, Foster-Miller mini-Talon, and Foster-Miller Talon were used for search and reconnaissance and mapping in the interiors of the collapsed buildings (Fig. 60.7). The robots were able to penetrate farther than nonrobotic tools in spaces too small for human or canine entry.
Fig. 60.7 
Robots available at World Trade Center disaster. Ovals indicate the three types of robots used in the first two weeks (courtesy CRASAR)
-
2007 I-35 Bridge collapse, Minneapolis, Minnesota (USA) [60.37, 60.38], where two unspecified unmanned marine vehicles were used for search and reconnaissance and mapping underwater. The ROVs appeared to provide views without risking human divers in the fast moving currents.
-
2007 Berkman Plaza II parking garage collapse, Jacksonville, Florida (USA) [60.39, 60.40], where an Inuktun Micro-VGTV was used during the rescue phase for search and during the recovery phase an Active Scope Camera and an Inuktun ASR Xtreme were used for structural inspection along with an iSENSYS IP3 UAV for reconnaissance and mapping and structural inspection. The Micro-VGTV ruled out the presence of a survivor in areas too dangerous for a human to enter. The ASC and Xtreme provided structural forensic information that resolved legal liability and insurance coverage costs. The UAV provided imagery that led structural experts to hypothesize the cause of the collapse.
-
2010 Prospect Towers parking garage collapse, Hackensack, New Jersey (USA) [60.22], where an Inuktun VersaTrax 100 and an Inuktun VGTV-Xtreme were deployed for search. The robots were used to see vehicle information, license plates, makes and models in areas not safe for responders.
-
2011 Fukushima Daiichi nuclear accident (Japan) [60.18, 60.41], where seven UGVs and two UAVs were used for search, reconnaissance and mapping, and structural inspection. The robots provided damage assessment and radiological surveys without exposing workers to radiation. A UGV and a UAV were lost during the first year, but only after they provided important information.
-
2011 Evangelos Florakis naval base explosion (Cyprus) [60.17], where an AscTec Falcon and AscTec Hummingbird were used to inspect the damage to the adjacent Vasilikospower plant without requiring engineers to risk exposure to live unexploded ordinance. The UAVs were used for structural inspection. The operations were successful and led to a rapid repair of the power plant.
-
2012 Costa Concordia (Italy) [60.42, 60.43], where an Ageotec Perseo ROV and a VideoRay ROV, possible other unreported ROVs, were used for reconnaissance and mapping, structural inspections, and for victim recovery operations from the sunken cruise liner. The ROVs were considered essential in understanding the situation under the water.
-
2013 Missing person Royal Canadian Mounted Police (Canada) [60.44], where a Draganflyer X4-ES UAV with a thermal camera was used by the Royal Canadian Mounted Police to find an unconscious driver who had wandered from a car wreck. This is considered the first reported live save by a robot.

Robots were requested and present, but not used at the 2009 State Archives Building Collapse in Cologne, Germany, due in part to operator safety [60.45].
3.4 Mine Disasters
Robots were at 12 mining disasters. They were successful at seven events:
-
2002 Barrick Gold Dee mine, Elko, Nevada; 2004 Excel #3 mine, Pikesville, Kentucky; 2005 DR#1 mine, McClure, Virginia; 2005 McClane Canyon mine, Grand Junction, Colorado (USA), where a mine-permissible Remotec Wolverine (Fig. 60.8) was deployed the US Mine Safety and Health Administration (GlossaryTerm
MSHA
) used by to reopen mines that had been closed [60.46]. At the Barrick Gold Dee mine, the V-2 was deployed from the surface down a 16 ° slope and was able to navigate and to take continuous gas samples. At the Alliance Resources’ Partners Excel #3 (coal) mine the robot was able to penetrate 230 m into the mine and successfully completed the objective of providing an assessment of the situation. At the DR#1 Dixon-Russell (coal) mine the robot was able to penetrate 210 to 250 m into the mine with a slope of 18 ° and the robot arm was used to move and realign ceiling supports in order to progress into the mine. At the McClane Canyon (coal) mine trials were conducted to establish manipulation capabilities. In this case, the robot was tasked to close five doors and pull out timbers holding up a mine fan. The robot was generally unsuccessful with manipulation tasks.Fig. 60.8 
The mine-permissible variant of the Wolverine robot used at the 2006 Sago Mine Disaster (courtesy of the US Mine Health and Safety Administration)
-
2007 Midas gold mine, Midas, Nevada (USA), where an Allen-Vanguard from Fallon Naval Air Station and a Inuktun VGTV-Xtreme variant from the Center for Robot-Assisted Search and Rescue (GlossaryTerm
CRASAR
) were lowered into the mine and used for victim recovery [60.47]. Mine-permissible robots were not needed as the gold mine was not emitting methane. The Allen-Vanguard that was lowered into the void and found the machinery but not the victim. The Xtreme was able to penetrate 35 m vertically into the void (Fig. 60.9). The robot scanned the area where the body was recovered but did not have sufficient lighting to actually see the body.Fig. 60.9 
The Inuktun VGTV-Xtreme robot being lowered into the Midas gold mine (courtesy of CRASAR)
-
2007 Crandall Canyon mine, Huntington, Utah (USA), where a custom Inuktun mine Cavern Crawler robot was deployed by US mine Safety and Health Administration to search for missing miners (Fig. 60.10) [60.47]. The robot had to travel over 430 m through a 22 cm diameter borehole. Four attempts were made to enter the mine through two different boreholes, but only one was successful. In the fourth run, the robot was able to travel through the borehole then search about 2 m on the mine floor which was largely impassable due to the debris and drilling tailings. The robot provided no sign of the miners.
Fig. 60.10 
The Inuktun mine crawler robot being lowered into a borehole at the Crandall Canyon mine (courtesy of CRASAR)
-
2010 Pike River coal mine, Greymouth (New Zealand), where two unknown New Zealand Defence Force bomb squad robots and Western Australia Water company pipeline inspection robot were used for search and recovery operations. The first New Zealand Defence Force (GlossaryTerm
NZDF
) robot ailed after reaching 550 m into the mine due to falling water, but was successfully restarted and moved out of the way of the second robot before running out of battery power. The first and second robots were presumed destroyed in a second explosion that ended any expectations of survivors. The pipeline inspection robot was later used for recovery operations.



Robots were unsuccessful at two events. At the 2004 Browns Fork mine, Hazard, Kentucky, disaster, the Wolverine robot was too tall to go into the area of interest to conduct a search. At the 2006 Sago mine Disaster, Sago, West Virginia (USA), the robot was only able to penetrate about 700 m into the mine before being damaged when it accidentally was driven off the path and flipped over [60.46].
Robots were on-site but not used at three events: the 2001 Jim Walters #5 mine fire (USA) as the robot was not mine-permissible, the 2010 Wangjialing coal mine (China) presumably because the unidentified robot could not transit high water, and the 2010 Upper Big Branch mine (USA) where the restricted confines posed too great a risk of failure. Robots were requested for the 2010 San Jose Copper-Gold mine (Chile) and the 2011 San Juan De Sabinas coal mine (Mexico) disasters but robots were not small enough and thus were not sent.
4 Robots at the Fukushima-Daiichi Nuclear Power Plant Accident
The Fukushima-Daiichi nuclear power plant accident merits special attention because robots have been used for both the response and recovery phases. The use of robots have been sustained over months and years, and a wide variety of robots have been used.
Control over the reactors at the Fukushima-Daiichi nuclear power plant was lost on March 11, 2011, after a 14 m high tsunami from the Eastern Japan Earthquake submerged the facility. Units 1–3 melted down, hydrogen exploded at the high floors of nuclear reactor buildings of Units 1, 3, and 4, and huge amounts of radioactive materials were released to the wide area centered by Fukushima Prefecture. Robots were used during the prolonged response phase for assessment of the emergency situation and mitigation of the event by recovering the cooling systems to enable a cool shutdown. After four months, the immediate response turned to preparation for decommission as the reactors were stabilized. The recovery phase requires operations in the contaminated area; therefore, many robotic systems have been, and are continuing to be, used for minimizing workers’ exposure to radiation by substituting for human operations. In the first year, ground and aerial robots were used for exterior operations outside the buildings and ground robots for interior operations inside the reactor buildings.
4.1 Exterior Operations
Robots were used outside the buildings and on the grounds by different teams for four applications: debris removal, structural inspection , radiological surveys , and mitigation efforts.
4.1.1 Debris Removal by Unmanned Construction Machines
There was a large amount of contaminated debris outside the building producing a high dose rate of a few hundred mSv∕h, preventing workers accessing the buildings. Debris removal operations were conducted starting April 1, 2011 for nine months using an adaptation of unmanned construction robot machines had been developed for the restoration work after the Unzen Fugen-dake Volcano eruption in 1991 (Fig. 60.11). Debris was gathered by two backhoes and a bulldozer, with wireless teleoperation, then loaded to containers on two remote-controlled crawler dump trucks, and carried to storage yards of contaminated materials. The crawler dump trucks were teleoperated from a remote operator car, with command and control signals and data from camera and sensors transmitted via a remote-controlled radio relay car. Seven camera cars were connected to the system by wire, and external image views supported the task execution. As a result, debris of was removed from the area wide, and the radiation level reduced significantly to safely accessible level for the workers.

Unmanned construction machines used at Fukushima-Daiichi (courtesy of Unmanned Construction Machines Association)
4.1.2 Structural Assessment and Radiological Surveys from T-Hawk UAV
A team led by Westinghouse used Honeywell T-Hawks from April 10, 2011, to the end of July, 2011 (Fig. 60.12). The team flew approximately 40 missions with two objectives originally. One was to investigate the state of the reactor and turbine buildings and to acquire video of the general area in order to support initial assessments of the incident and to help plan for debris removal. The second was to take radiological samples to produce a survey map. The objectives later expanded to off-site debris field survey, survey of the coastal breakwater structure, a gamma radiation survey at specific locations of interest to TEPCO, and airborne-particulate sampling (flying into plumes) at select locations.

UAV used at Fukushima-Daiichi: (a) T-Hawk and (b) top view of nuclear reactor building of Unit 1 (photographs courtesy of TEPCO)
4.1.3 Radiation Source Measurement by Gamma Cameras
The Japan Atomic Energy Agency (GlossaryTerm
JAEA
) developed a robot control car TEAM NIPPON with a gamma camera, a 3-D camera, a thermo camera, and a QinetiQ Talon robot that were provided by Idaho National Laboratory, a US federal laboratory that conducts research in nuclear reactors, in collaboration with Tohoku University. It was used from May 5, 2011 for measuring radiation of the outdoor debris, and provided visualized data as shown in Fig. 60.13 [60.18, 60.41].
Gamma radiation measurement by UGVs: (a) TEAM NIPPON and (b) visualized radiation source by gamma camera (courtesy of JAEA)
4.1.4 Remote Control of Concrete Pumping Cars
Concrete pumping cars had been used for pouring water from outside in order to cool used-fuel pools on the top floor of the exploded nuclear reactor buildings. In order to reduce the radiation exposure of workers who control their long arms, the cars were fitted for remote teleoperation by using remote controllers, cameras, and wireless equipment on May 2011.
4.2 Interior Operations in Nuclear Reactor Buildings
UGVs continue to be used for operations in the interior of the reactor buildings. UGVs were used to survey the interiors (iRobot Packbot, IRS Quince), monitor for gamma radiation (JAEA J-3), remove debris (QinetiQ Bobcat and Talon, Brokk), and experiment with decontamination (iRobot Warrior).
4.2.1 Survey of Nuclear Reactor Buildings by PackBots
On April 17, 2011, TEPCO workers and six engineers from iRobot used two donated PackBots to open the double hatch doors of Units 3 and 1, providing the first entry into those buildings (Fig. 60.14). The TEPCO workers carried the robots to the front of the hatch, and pointed an antenna to the robots from the glass window of the hatch. Based on the readings of radiation dose rate, temperature, humidity, and gas concentration, humans were allowed to enter the nuclear reactor buildings to begin the cool shutdown process. On the following day, the same mission was tried in Unit 2, but the PackBot could not complete it. The camera window of PackBot misted over under high humidity, because the vapor from boiled water on the basement floor did not escape from the building. Prior to the actual operations, TEPCO workers were intensively trained on remote teleoperation starting on March 24, 2011, and the scenario was verified in Unit 5, which was not damaged. The PackBots continue to be used for monitoring and light tasks in the buildings.

Operations of PackBots in Unit 1 (courtesy of TEPCO)
4.2.2 Survey of Nuclear Reactor Buildings by Quince
The Quince robot was used in addition to the iRobot Packbots in June, 2011 (Fig. 60.14), and is now being used in cooperation with the Packbots for various missions as only Quince could climb the steps to the upper floors. Quince had been developed for CBRNE disaster response by a team from the International Rescue System Institute including Chiba Institute of Technology and Tohoku University. One unit of Quince was lent to TEPCO for free after radiation-proof test, wireless communication test, intensive refinement of reliability, and training exercises of operators [60.48]. Quince has been used for surveillance of the nuclear reactor building since June 24, 2011. On July 8, it entered Unit 2 and measured the dose rate on the second and third floors, then sampled dust for identification of nuclide (Fig. 60.15). On July 26, valves and pipes of a spray cooling system were visually inspected by the high-density camera and dose rate was measured in Unit 3. Redundant cooling system was established on the basis of these data. On October 20, Quince surveyed fully on the third floor of Unit 2, then climbed the stairs up to the fifth floor (operation floor) for monitoring. The high dose rate, condition of the crane, etc. were investigated on the high floors at first. However, it stopped on the third floor on its return home because its communication tether was hooked and cut. If Quince had not been applied, it would have been delayed to examine situation of the upper floors, and the risk would have become higher because of late cool shutdown. Quince 2 and 3 were remodeled and lent for free of charge to TEPCO from 2012, and are used in cooperation with PackBots for various missions.

Quince at Fukushima: (a) robot platform and (b) its operator station image captured in the mission on July 8, 2011 (courtesy of TEPCO)
5 Lessons Learned, Challenges, and Novel Approaches
The experiences with disaster robotics since 2001 provide key insights into technical challenges, such as mobility, communications, sensing, control, and human factors, but also into sociotechnical issues such as training and procedures for transporting and decontaminating robots. This section highlights the general lessons learned and the fundamental problems posed in mobility for UGVs, UAVs, and UMVs, communications, control, sensors and sensing, power, human–robot interaction, multirobot team coordination, and other issues.
5.1 Mobility: UGVs
Mobility remains a major problem for all modalities of rescue robots, but especially for ground vehicles. The challenges for ground robots stem from the complexity of the environment, which is an unpredictable combination of vertical and horizontal elements with unknown surface characteristics and obstacles. For example, at Fukushima, the original configuration of the iRobot Packbot could not climb the steep metal staircases. In other cases, a robot could not cross a catwalk or climb stairs due to rubble and the lack of confidence that the robot could negotiate the debris. Robots such as the Inuktun VGTV-Xtreme at the La Conchita mudslides could not handle the terrain, while the Allen-Vanguard was too heavy for vertical entry into the Midas gold mine.
The field is currently lacking any useful characterizations of rubble to facilitate better design. However, even without a complete understanding of rubble environments, it is clear that more work is needed in actuation and mechanical design as well as in algorithms that would enable the robot to adapt its mobility style to the current terrain (also known as task shaping [60.49]).
The state of the practice in UGVs for disasters are polymorphic tracked vehicles, with a movement toward tracked robots with manipulators (e. g., the Wolverine used for mine disasters, the robots at Fukushima) and two instances of snake-like robots (Niigata–Chuetsu earthquake, Berkman Plaza II collapse). Wheeled platforms are severely limited by the roughness of the terrain and the need to overcome obstacles, steps, ramps, but combination wheeled and tracked vehicles are commercially available. Basic research in legged robots (Chap. 48), wheeled robots (Chap. 49), micro/nanorobots (Chap. 27), and manipulators will benefit disaster robotics.
Free serpentine robots such as the Soryu III used at the rubble at the Niigata–Chuetsu earthquake provide a fundamentally different style of mobility, while fixed-based snakes can be used in tandem with a more traditional platform as a highly flexible sensor manipulator [60.50]. Examples of both types of snake robots are shown in Figs. 60.3 and 60.19.

Examples of legged and crawler robots. (a) Hexapod (legged) robot from the RHex project traversing a portion of the National Institute of Standards and Technology (NIST ) test bed (courtesy of R. Sheh) and (b) Terminatorbot being tested in rescue test bed (courtesy of R. Voyles)

Examples of tracked robots with manipulator arms that have been used for disasters or rescue competitions. (a) View from Foster–Miller Talon at the WTC of its arm (courtesy of CRASAR) and (b) teleMAX by Telerob at the Rescue Robotics Camp (courtesy of R. Sheh)

View of the NIST standard test bed for search and rescue used by RoboCup Rescue. (a) View of overall test bed, (b) dummy representing a victim, and (c) a step field challenging robot mobility (courtesy NIST)

A CMU (Carnegie Mellon University) fixed-base snake being tested at a facility in California (courtesy H. Choset)
In order to overcome the difficulties posed by unknown terrain, novel legged robots and crawler robots have been proposed. In addition, some types of crawler robots can climb walls and reach locations that would otherwise be very hard to reach. Legs are interesting because they exploit biomimetic principles. The RHex hexapod robot [60.51], proposed for search and rescue among other potential applications, is shown in Fig. 60.16 climbing random step fields. Crawler robots such as the Terminatorbot [60.52] use their arms or legs to pull themselves through the rubble. The Terminatorbot is designed to withdraw itself into a cylinder that can be inserted through one of the small boreholes commonly drilled by responders to get through walls, then open up and begin moving. Other types of crawlers include lizard- or gecko-like robots that adhere to walls; these types are promising but have not been tested for the dusty, wet, and irregular conditions found in disasters.
Another novel concept for UGVs is that of smart tools, particularly lifts that can help stabilize collapsed structures during extrication [60.53, 60.54]. Extrication is one of the most time-consuming activities in rescue. Rescuers must proceed cautiously when removing rubble in order to prevent secondary collapses or slides that would further injure the survivors. Experiments suggest that roboticized lifts or shoring mechanisms would be able to sense and respond fast enough to small movements in the rubble to adaptively maintain stability [60.54].
5.2 Mobility: UAVs
UAVs are increasing in popularity with responders, possibly because on demand aerial access is a unique capability. Aerial vehicles, particularly helicopters, are vulnerable to wind conditions near (or in) structures and obstacles such as power lines, trees, and overhanging debris. A UAV at Hurricane Katrina hit a power line.
Novel ideas include a plane with the size of a person’s hand that can fly indoors and planes with foldable wings, making it easier for responders to carry them. Quadrotor helicopters appear far more stable and easier to pilot; a design that balanced the larger size of a quadrotor with an appropriate payload could make UAVs more assessable to nonpilots. Another exciting direction is hybrid platforms that can change from fixed-wing operations, covering large distances, to rotary-wing operations, flying near or inside buildings [60.55].
5.3 Mobility: UMVs
Surface and underwater vehicles have to contend with swift currents and floating or submerged debris, placing significant demands on agility and control. As seen at the Tohoku Tsunami, AUVs could not be used due to the possibility of colliding with flotsam. Teleoperated ROVs can function in such conditions but have a risk of tethers becoming tangled or caught, as seen at the Tohoku Tsunami and the Hurricane Ike response.
5.4 Communications
Robots rely on real-time communications for teleoperation and for enabling responders to see what the robot is seeing immediately. Ground robots communicate either through a tether or via wireless radio. Aerial and surface robots are wireless, while underwater rescue robots are controlled via a tether. The communication bandwidth demands of all modalities are generally high due to the use of video imagery, and the tolerance to communications latency is low due to the control needs. In addition to communications between the tactical rescuers and their robots, it is difficult to report or transfer critical information provided by rescue robots to the strategic enterprise. Disasters typically destroy the communication infrastructure, both telephones and cellular phones, and alternatives such as satellite phones become saturated by response agencies.
Wireless communications with robots remain problematic. Operations below ground or near structures interfere with the physical propagation of radio signals. As shown in high-fidelity USAR response exercises, ad hoc wireless networks established by responders are likely to become quickly saturated, with no way of establishing priority over information. At the World Trade Center, data from the Solem robot deployed in the interior of building WTC4 returned totally black frames for 1 min 40 s of the 7 min run before wireless communications were totally lost and the robot was abandoned [60.36]. In addition, many wireless robots use lossy compression algorithms to manage bandwidth, which interfere with computer vision techniques, and/or connect through insecure links, raising the possibility that news media might intercept and broadcast sensitive video of trapped victims.
Rescue robots working underground, either for USAR or mine rescue, have two alternatives to wireless communications: either operate with a tether or deploy repeaters to maintain wireless communications. Many wireless robots now can be purchased with a fiber-optic tether; however, these tethers are fragile and may break or tangle, as seen at several mine disasters. The fiber-optic tether may also tangle with the safety rope used to support the robot during vertical drops. Data for the World Trade Center deployments indicated that a dedicated person was required to manage the tether but that 54 % of tether management operations were to allow the robot to reach a more favorable position or to recover the robot after its mission [60.36].
At Fukushima, outside the buildings, allocation of wireless frequencies and accommodation of communication methods were extremely difficult, and usage of some robot frequently affected the other robots. Inside the buildings, wireless communication was sometimes unstable, and a few robots could not return. Operators always had to pay attention to radio field strength and cable tether handling.
Majority of UGV operations have used tethered robots, with the only wireless robot used at the WTC disaster being lost and the wireless NZDF robots creating significant problems with intermittent failures. Hybrid communications, in which a robot is primarily on a tether and then operates for short distances over a local wireless link before reconnecting to the tether, appear to be attractive.
A novel approach is to use other robots as repeaters, either stationary or mobile, to facilitate the establishment of communications and sensor networks. As repeaters for mobile ad hoc networks, robots on the land, sea, and air can extend the range and throughput of wireless networks [60.56]. A recent US Defense Advanced Research Projects Agency program, LANdroids, developed a set of small robots that acted as mobile repeaters for a larger robot entering the interior of a structure or tunnel. Aerial vehicles are particularly attractive as they can provide larger relay ranges while providing a bird’s eye view of the disaster. However, a UAV does not always have to move: a tethered blimp or kite can support a sophisticated payload with no maintenance or support for days [60.57, 60.58].
5.5 Control
Robot control can be subdivided into platform control, which is usually considered by control theory, and activity control , which generally falls under the purview of artificial intelligence. Rescue robots are challenging both for traditional control and for artificial intelligence. The high degree of mechanical complexity of all modalities and the demands of the environment present major challenges for control theory. In all report events, the robot’s activity was handled by teleoperation; a human is needed to direct the robot and to perform mission sensing. The well-documented problems of manual teleoperation (Chap. 34) argue for increasing autonomy [60.59], both in terms of navigation.
Navigational autonomy has been the primary focus within the disaster robotics community and efforts generally fall into the following three categories:
-
Simultaneous localization and mapping (GlossaryTerm
SLAM
): SLAM is needed for the search and reconnaissance and mapping tasks. Whereas SLAM in office-like environments appears to be almost solved, the application of same techniques in harsh and unstructured environments turns out to be extraordinarily difficult or even impossible. One strong limitation of current mapping solutions is their inability to provide an accurate 3-D model of the environment at high data rate. For USAR such a solution has to cope with the reflection properties of debris, smoke due to fires, and the spectrum of lightning conditions. The solution also needs to be low cost in terms of required onboard GlossaryTermCPU
(central processing unit) computation and payload, due to weight and power limitations. Existing solutions rely either on automatically inclined [60.60, 60.61] or constantly rotating GlossaryTerm2-D
(two-dimensional) laser scanners [60.62]. In contrary to 2-D maps, which are typically generated in real time [60.63], 3-D maps are updated at low rates on the order of seconds due to the limited data rate of inclined or rotated laser scanners. -
Exploration, planning, and path execution: The central question in autonomous exploration is: given what you know about the world, where should you move next to gain as much as many new information as possible? [60.64]. Autonomous exploration can be subdivided into determining where to go next, how to plan the path to get there, and how to execute that path safely.
The primary approach to exploration is to use a frontier-based exploration algorithm is to gain new information by moving to the boundary between open space and unknown territory, denoted as frontier. Frontier-based exploration, either based on 2-D [60.64] or 3-D [60.65] map representations, is an efficient technique that has been successfully deployed together with SLAM techniques for exploration in NIST-like USAR arenas [60.66].
The objective of path planning in harsh environments is not necessarily to generate the shortest but the safest path. Wirth and Pellenz introduced an exploration strategy and path planner that utilizes occupancy grid maps for combining the distance transform and the obstacle transform (when planning to several frontier cells at the same time [60.67] in order to select the safest alternative consisting of target location and path to reach the target.
Most methods for motion planning in USAR are still limited to static environments that can efficiently be represented in 2-D. However, since robots operate on rough terrain that may suddenly shift it is important to consider the shape of the surrounding terrain and its potential impact when moving. Several researchers have introduced solutions with short-term planning look ahead that execute specific robot behaviors with respect to the current situation of the robot. Okada et al. introduced an autonomous controller for tracked vehicles that is based on continuous 3-D terrain scanning [60.68]. Magid et al. introduced a system for keeping the robot maximally stable at every step of its path while allowing the vehicle to loose balance in a controlled manner for facilitating safe climbing over debris [60.69]. Sheh et al. developed a method for behavioral cloning, a type of learning by imitation that produces control rules that clone the skills of an expert human operator [60.70]. Dornhege et al. introduced the concept of behavior maps, which link certain robot behaviors on rough terrain such as climbing over stairs and obstacles, to structures detected from 3-D point clouds in real-time [60.71].
-
Object recognition and scene interpretation: The search, reconnaissance and mapping, and structural inspection tasks for disaster robots would benefit from autonomy. They currently rely on humans to manually scan video feeds for signs of survivors, reconstruct the scene, identify potential hazards, and accurately comprehend the integrity of structures. To this end, Andriluka et al. evaluated various state-of-the-art techniques for vision-based victim detection from UAVs [60.72]. They concluded that by combining multiple weak models the overall detection reliability can be increased. Kleiner and Kummerle presented an approach for detecting victims based on several visual features such as body motion, skin color, and body heat [60.73]. Hahn et al. presented an approach for improving victim detection from low-cost thermal sensors by computing heat distributions while exploring an environment [60.74]. Birk et al. developed a system for recognizing humans from images taken by an infrared camera that considers plausible body shapes and postures [60.75].
5.6 Sensors and Sensing
Sensors, and sensing, pose the greatest mission challenge; without adequate sensing, a robot may be in an area of interest but be unable to navigate or to execute the larger mission. The physical attributes of a sensor (size, weight, and power demands) impact on whether it can be used with a particular robot platform. Currently sensors are not interchangeable between platforms; standards are needed for footprint sizes, mounting, connections, and display space.
The functionality of a sensor depends on the modality and mission [60.16]. The primary sensor missing from all robot modalities operating outside of water is a miniature range sensor. With a miniature range sensor, the success in localization and mapping seen with larger robots would be transferable to rescue robots. The sensor payloads for other missions depend on those applications; however, two sensor needs for USAR are particularly noteworthy. One is a detector that can perceive victims obscured by rubble; current radars have not been reliable in mixed rubble. Another needed sensor is one that can tell if a victim is unconscious but alive without touching the victim. A robot may be able to see a victim, yet not be able to crawl to the victim and make contact or scrape away enough dirt or clothing to take a pulse. Stand-off detectors such as millimeter-wave radars and gas detectors appear promising but have not been validated at this time.
Smaller, better sensors are not sufficient; improvements in sensing algorithms are also needed. At this time, humans are expected to interpret all sensing data manually in real time. This is a daunting task for many reasons. Human performance is handicapped by physiological factors introduced by sensing through a computer display (also known as computer mediation), the location of sensors at viewpoints low to the ground, generally restricted fields of view, and fatigue. The modality output itself may also be nonintuitive, such as ground-penetrating radar. However, autonomous detection and general scene interpretation is considered well beyond the capabilities of computer vision. This presents a case where neither the human nor the computer can accomplish the perceptual task reliably and argues for investigation into human–computer cooperative techniques for perception. Algorithms that enhance the image for human inspection, supplement depth perception, or cue interesting areas are within the reach of computer vision.
5.7 Power
The robot modality and mission poses distinct challenges for power, although only one robot, the NZDF robot at the Pike River mine, has caused a failure. In general, battery power is preferred over internal combustion because of the logistics difficulties in transporting flammable liquids. While the requirements of each rescue robot application is largely unknown, a partial understanding is emerging of the power profile. For example, the operation tempo of a ground vehicle operating underground is on the order of 3–4 runs, each around 20 min in duration, over a 12–14 h shift, with the robot kept on hot standby for the majority of the shift. Rotary-wing aerial vehicles for tactical reconnaissance and structural inspection show an operations tempo of 5–8 min per face of a building, while fixed-wing vehicles are airborne for less than 20 min. Other rescue missions, such as wilderness search and rescue, will have different requirements but the need for batteries over internal combustion and for determining the power profile is the same.
5.8 Manipulation
Manipulation has been required for mine remediation (e. g., DR#1 and McClane Canyon mines) and at the Fukushima nuclear accident, but overall manipulation has failed in at least one task per mission. Furthermore, manipulation is almost always time consuming as all reported instances have been teleoperated. Robots with manipulators (such as that seen in Fig. 60.17) extend the capabilities of ground vehicles by allowing the robot to sample the environment, interact with survivors, move light obscurations, and add unique camera viewpoints. However, the manipulator extends the volume of the robot, impacting navigation. The arm is often at risk of being damaged in confined spaces being hitting on overhanging rubble. Manipulators also add to the control and mechanical complexity of the robot.
5.9 Human–Robot Interaction (HRI )
According to the analysis by Murphy [60.22], over 50 % of the robot failures during a disaster are due to human error, which emphasizes the importance of human–robot interaction. For the purposes of this chapter, HRI concerns fall into five topics: ergonomics, system design, human–robot ratio, situation awareness, and training.
One aspect of HRI is ergonomics. The Fukushima nuclear accident highlighted how personal protection equipment (e. g., full-face mask and rubbery gloves) precluded workers from performing delicate work and efficient task execution.
Another aspect of HRI is the larger system design. At the Fukushima nuclear accident, workers had to carry the robots to the point of entry; this sometimes increased the total radiation exposure of workers, which was clearly not the purpose of the robot. The inability to transport certain robots caused them to be excluded from the World Trade Center disaster.
The number of operators per robot has been the subject of debate, though Murphy and Burke in [60.76] offer a formula based on their comprehensive field studies for computing the baseline human-to-robot ratio
The idea is to then justify why a smaller ratio would not increase unacceptable risk to the mission. For example, a UGV often does not need a safety officer, while a UAV does under most regulations. One way to decrease the number of people is to reduce their workload, such as by increasing the navigational autonomy from normal operations. However, Murphy and Burke document that if the unmanned system encounters a problem and returns control to the operator, the operator is unlikely to be able to react fast enough to avoid a crash, collision, or severing of a tether. This problem has been documented in aviation safety with initial problems with auto-pilots, where it is generally referred to as the human out of the loop control (GlossaryTerm
OOTL
) problem. The OOTL problem should not be interpreted as discouraging autonomy but rather encouraging a more comprehensive consideration of how autonomy will be handled in all conditions, not just normal operations.Related to the number of operators is how well they can maintain situation awareness. Situation awareness is defined by Endsley in [60.77] as
the perception of the elements in the environment within a volume of time and space, the comprehension of their meaning and the projection of their status in the near future.
Drury et al. [60.78] have defined types of situation awareness within search and rescue based on an analysis of RoboCup rescue tasks, while Casper and Murphy [60.79] and Burke et al. [60.80] have examined operator situation awareness in technology insertions. User interfaces are a key component in facilitating situation awareness. In rescue robotics, user interfaces are generally primitive and work through the operator’s visual channel to provide robot, task, and situation awareness of the state of the robot, task progress, and the general operational environment. To highlight the importance of user interfaces, one robot at the World Trade Center was rejected because of the complexity of its interface [60.36]. While the user interface for fieldable rescue robots primarily display the video output from the robot, experiences from RoboCup rescue suggest that a good interface will both facilitate commanding the robot (inputs) and will provide three types of information (outputs):
-
The robot’s perspective: camera view(s) from the robot’s current position, plus any environmental perceptions that enhance the general impression of telepresence
-
Sensor and status information: critical information about the robot’s internal state and its external sensors
-
If possible, a map: a bird’s eye view of the robot situated in the local environment.
The Fukushima nuclear accident illustrated the importance of training, as training of operators with using simulated mockups took over a month. The current state of the practice is for responders to receive training from the robot manufacturer on how to operate and maintain the robot, ignoring concepts of operations for actual scenarios. Training is a related issue in human–robot interaction [60.81]. Rescue workers have limited time compared with military operations to learn about robots and few opportunities to practice. While a bomb squad or special weapons and tactics team for law enforcement may be called out several times each month, a rescue team may be called out only a few times each year. For the near future, rescue workers may not have had prior training or experience with a robot prior to the disaster and be expected to use prototypes with only hasty training.
5.10 Multirobot Team Coordination
Multirobot teams of robots that cooperate with each other or work on the same objective have already been used or demonstrated for response and recovery activities at Hurricane Wilma (UMV-UAV) [60.24], the Tohoku tsunami (UMV-UMV) [60.31], and the Tohoku earthquake (UAV-UGV) [60.30]. These have all been heterogeneous teams though homogeneous teams have been entered at the RoboCup rescue competition [60.82]. Only one of the three deployed teams was explicitly coordinated, where a Quince robot carried a Pelican UAV at the Tohoku earthquake and conducted cooperative mapping of the interior of a damaged building [60.30]. The current research approach to teams is focusing on adopting techniques from artificial intelligence for either centralized or distributed coordination.
Multirobot teams not only offer the possibility to field diverse capabilities, they also exhibit increased robustness due to redundancy, and superior performance by parallel task execution [60.83]. This latter aspect is as important as the first one, since the time to complete a rescue mission is of vital importance. For example, one fundamental problem when searching for survivors is to efficiently coordinate a team performing space exploration. However, the IRS-CRASAR team at the Tohoku tsunami response uncovered implicit assumptions about parallel task execution that limited performance [60.31]. The coordination of several autonomous units in search and rescue operations still represents an open issue. One reason is the fact that the higher number of degrees of freedom imposed by the robot team requires a larger number of trained human operators, which in turn makes the deployment during a rescue mission more complicated. Certainty, the number of required operators also depends on the quality of autonomous perception and decision-making of each single system. Therefore, in order to reduce the human-to-robot ratio in the field, autonomous capabilities as well as autonomous methods facilitating team coordination are needed. There are several existing techniques for team coordination in USAR, which can generally be separated into centralized and decentralized approaches.
There are three novel types of teams being pursued for disaster robotics. One type is swarms. Researchers such as [60.84] have discussed the possibility of using cost-effective, insect-sized robots to penetrate deep within a pancake building collapse and then signal the presence of a victim. One of the key features of swarm approaches is that they can scale up easily. The insect swarm scenario leaves hard problems like control, sensing payloads, localization of the victim, and communications to the imagination, but is certainly a worthy concept. However, some of the search algorithms used by insects may be adapted to single robots, for example, win-shift win-stay sampling exhibited by bees may be useful for search [60.85]. A second type of team, similar to swarms, is motes, where aerial vehicles that drop intelligent sensors called motes.
A third type of team is a hybrid robot-animal team, where search dogs carry roboticized cameras (dog-cams) [60.86] or wiring rats with controllers. Attaching cameras to search dogs has been explored for several years and such a system was used at the World Trade Center. The concept does not compete with robots, as robots are used to enter places canines cannot. The canine team handlers have generally objected to dog-cams because the cameras and communications gear interfere with the dog’s mobility, pose the hazard of snagging, and the dog cannot be readily commanded to stop at points of interest beyond the line-of-sight of the handler (dogs use visual cues as commands, more than audio). However, there is less objection to placing nodes in a rat’s brain to stimulate and drive the rat into a void while carrying a camera or other sensors [60.87]. The motivation for a robot rat stems in part from the rat’s mobility and relative low value. While the technical feasibility of a robot rat may be within reason, assuming advances in wireless communications, the response community has been lukewarm toward the idea [60.88]. Unlike rats, robots can be kept in storage for years and can penetrate through pockets of fire or areas with no oxygen. A robot rat has all of the limitations of dog, including the problem of a handler becoming too emotionally attached, and is likely to scare a trapped survivor just as much as the other rats that swarm a disaster. The conventional wisdom is that, if the sensors, wireless, and power systems can be miniaturized and operate reliably enough to control a rat deep within rubble, those systems will enable responders and robots to work without the rats.
5.11 Other Issues
In addition to the challenges by the functional subsystems of a robot, three other issues should be considered.
Robots must be reliable. As noted in the discussions of the Pike River mine explosion and the Fukushima nuclear accident, failure of a robot can obstruct the mission execution or cause it to completely fail. A robot failing not only means the mission did not get performed, but could prevent other robots from carrying out the mission. For example, a robot getting stuck on the stairs would pose a navigational hazard to other robots or to workers in bulky safety gear. Such risk has to be minimized by thorough analysis and preparation beforehand.
Robots must be suitable for the environment. In at least two mine disasters, robots could not be used because they were not explosion proof – yet needed to be used in an explosive atmosphere. At Fukushima, robot operators had to be concerned with potential damage of semiconductors by total dose of radiation, which could affect not only CPU and image sensors but also various components using semiconductors such as engine, battery, etc. Monitoring of the total dose using a dosimeter was necessary.
Robots must be decontaminated. Radiation contamination at Fukushima was a serious issue because it caused radiation exposure of workers in maintenance and battery exchange. However, UGVs at the World Trade Center collapse were exposed to raw sewage and body fluids. Decontamination has been discussed in standardization procedures but few platforms are built to be completely cleaned or to be easily cleaned without exposing the human.
6 Evaluation
Disaster robotics is still an emerging field and methods for evaluating a rescue robot or the larger mixed human–robot system are still forming. Murphy in [60.22] provides an analysis of the performance of disaster robots at 34 events. Evaluation is largely centered around the US government National Institute of Standards and Technology (NIST) efforts to standardize rescue robots for adoption by US responders via originally a standard test course and more recently a set of standard test methods. Each standard test method is an inexpensive, reproducible prop that tests a single capability; for example, Fig. 60.18 shows a prop designed to test a robot’s ability to traverse rough terrain represented by a wooden step field. The standard test course and methods are duplicated via the USARsim computer simulation, and at least two sites, NERVE and SWRI, have physical testbeds consisting of the NIST standard test methods – though other physical testbeds such as Disaster City exist. The test course and methods have been used since the late 1990s for the RoboCup rescue and AAAI mobile robot competitions. This effort is being conducted through ASTM and thus, even though it is largely driven by the US, will likely result in an international standard that may be adopted by other countries.
6.1 Computer Simulations for Rescue Robotics
Computer simulations provide a low-cost mechanism to explore the larger behavior or a robot or system. Generally, computer simulations provide high fidelity for testing software execution, but their physical fidelity depends on the physics engine. Simulating sensors and the complex environments produced by a disaster is difficult and is rarely accurate enough to test perceptual algorithms. At the time of writing, two readily available computer simulations exist for exploring the strategic and tactical applications of rescue robots within the RoboCup rescue framework [60.89], the RoboCup rescue simulation project [60.90], and USARSim [60.91]. These simulations are well understood, accepted, open-source, and free; as such, they should be useful for most researchers or practitioners interested in ground-based rescue robotics.
The RoboCup rescue simulation project is used in the RoboCup rescue simulation league to study agent-based approaches to strategic planning for the disaster response. The simulator assumes a strong centralized response capability that is not necessarily the case for all countries or regions; the United States, for example, relies on a highly distributed organization that obviates many centralized coordination schemes. Although the simulation is focused on strategic decision making, particularly dynamic resource allocation, it does support the examination of how robot resources might be allocated during a disaster and how data from a robot might be propagated through a system. It permits the simulation of monitoring of disaster damage from reports by humans, distributed sensors, and robots and can simulate complex interactions such as telemedicine.
USARSim is a computer simulation developed by the University of Pittsburgh for physical robot simulation in disaster situations [60.91]. The simulation replicates the NIST standard test bed for search and rescue and permits efficient prototyping and testing of robot design and most aspects of control software. It uses Unreal game engine for handling physics and graphics, and virtual robots have capability of sensing (image, laser range finder, etc.) and actuation (wheel, motor, etc.) with data processing (image recognition, SLAM, etc.) in artificial environments. In 2006, the RoboCup rescue competition created a simulation league using this environment.
6.2 Physical Test Beds
Physical test beds provide a more realistic venue than a computer simulation for evaluating rescue robots, but may not be available to researchers, too expensive to use or to travel to, or not adequately capture some key aspect of a disaster. Physical test beds generally fall into three categories: test beds developed for the fire rescue community, test beds developed for the robotics community, and the NIST standard test bed for search and rescue.
Fire rescue training test beds occur throughout the world and are used to train human firefighters, rescue specialists, and canine teams under highly realistic conditions. The Texas A&M Engineering Extension Service’s Disaster City complex has 52 ac devoted to representative structural collapses, ranging from multistory commercial building to wooden housing. Disaster City is the site for the NIST Response Robot Evaluation Exercises. The GlossaryTerm
NASA
Ames Research Center’s Disaster Assistance Response Team facility at Moffett Field has hosted several events as well. In general, fire rescue test beds are constructed from construction and sewer debris, can introduce smoke and some simulants, and pose challenging mobility conditions, but vary in terms of fidelity. In many test beds, the density of the debris does not contain the actual amount of metals in a real collapse. This can lead to optimistic reports of success of sensors and wireless communication devices. The test beds, being designed for human training, do not replicate the conditions under which a ground robot would be used. The terrain is generally on the exterior of the rubble and does not exercise the robot in confined or vertical spaces. Depending on the size of the facility, the test bed may or may not be suitable for evaluating UAVs. An example of a fire-training test bed appeared earlier in Fig. 60.19.Physical testbeds for the robotics community such as the New England Robotics Validation and Experimentation (GlossaryTerm
NERVE
) Center at the University of Massachusetts Lowell, and the facilities at the Southwest Research Institute (GlossaryTermSWRI
) in San Antonio, Texas, incorporate both general test courses for robots and the NIST standard methods.Perhaps the most influential physical simulation for researchers is the RoboCup rescue physical league which uses the NIST standard test bed for search and rescue, shown in Fig. 60.18. This competition started in 2001 [60.92] and has more than 40 team entries every year from all over the world. The RoboCup rescue physical league scores robot performance in terms of mobility, mapping, situation awareness, sensing, shared autonomy, etc. A robot or robot team competes in one of three arenas which simulate disaster situations at the annual RoboCup world competition. The mission of the robot teams is to collect victim information (existence, state, and location) by sensor fusion of vital signals (heat, shape, color, motion, sound, , etc.) and report a map of victims in disaster space so that responders can efficiently arrive at the victim for rescue. In addition to the arenas, the competition and test bed contain individual skill test stations, for example, in order to test mobility, robots must traverse a random step field made of wood. The test bed was designed to be portable and reasonably inexpensive and several locations around the world have set up duplicates. As a result of the constraints of cost and portability, the test bed is not fully representative of actual disaster physical conditions and does not test the operating conditions for the human teams.
6.3 Standards Activity
Standards for rescue robots and systems are being generated at the time of writing. The E54.08 subcommittee on operational equipment within the E54 Homeland Security application committee of ASTM International started developing an urban search and rescue (GlossaryTerm
USAR
) robot performance standard with the National Institute of Standards and Technology (NIST) as a US Department of Homeland Security (GlossaryTermDHS
) program from 2005 to 2010. It plans to cover sensing, mobility, navigation, planning, integration, and operator control in order to ensure that the robots can meet operational requirements under the extreme conditions of rescue. The standards will consist of performance measures that encompass basic functionality, adequacy and appropriateness for the task, interoperability, efficiency, and sustainability. The components of the robot systems include platforms, sensors, operator interfaces, software, computational models and analyses, communication, and information. Development of requirements, guidelines, performance metrics, test methods, certification, reassessment, and training procedures is planned.6.4 Evaluation
Evaluation of rescue robots is difficult not only because of the diversity of platforms and missions but also because each disaster is truly different. In addition, robots are part of a human-centric system: they are operated by humans in order to provide information to humans. Evaluation of the performance of a rescue robot system at an actual disaster is currently ad hoc. No computer or physical simulation for predicting the performance of robots and humans in a disaster has been validated; indeed, there is little argument that simulations are far easier than a real response. The difficulties of simulation are exacerbated by the differences between disasters. For example, the World Trade Center was unique in terms of the large amount of steel and the density of the collapsed material, while earthquakes and hurricanes are different from terrorist events.
Metrics for measuring performance remain a worthwhile quest. Quantitative metrics, such as the number of survivors or remains found, do not capture the value of a robot in establishing that there are no survivors in a particular area. Performance metrics from psychology and industrial engineering are only now beginning to be applied. These methods require enhanced computer and full-scale simulations in order to collect data. Data collection on human and overall system performance during a disaster has been done through ethnographic observations and are now moving to direct observations of situation awareness during demonstrations [60.80, 60.93]. Direct data collection during a disaster may not be possible as methods may interfere with performance (and therefore be unreasonable, if not unethical) and arouse fears by operators of Big Brother and being held liable for any errors in operation.
7 Conclusions and Further Reading
Rescue robots are making the transition from an interesting idea to an integral part of emergency response. Aerial and ground robots have captured most of the attention, especially for disaster response, but water-based vehicles (both surface and underwater) are proving useful as well. Rescue robots present challenges in all major subsystems (mobility, communications, control, sensors, and power) as well as in human–robot interaction. In terms of size, man-portable and man-packable systems are the most popular because of their reduced logistics burden, but the size of the platforms exacerbates the need for miniaturized sensors and processors. Wireless communications remains a major problem. While recent deployments have relied on polymorphic tracked vehicles, researchers are investigating miniature planes and helicopters along with new ground robots designs, particularly biomimetic. Research is also exploring alternative concepts of operations and user interfaces. Standards are currently under development and this will help accelerate the adoption of rescue robots. The annual GlossaryTerm
IEEE
(Institute of Electrical and Electronics Engineers) International Symposium on Safety, Security and Rescue Robotics is currently the primary conference and clearinghouse for research in rescue robotics.Abbreviations
- 2-D:
-
two-dimensional
- 3-D:
-
three-dimensional
- AAAI:
-
Association for the Advancement of Artificial Intelligence
- AUV:
-
autonomous underwater vehicle
- CBRNE:
-
chemical, biological, nuclear, radiological, or explosive
- CMU:
-
Carnegie Mellon University
- CPU:
-
central processing unit
- CRASAR:
-
Center for Robot-Assisted Search and Rescue
- DHS:
-
US Department of Homeland Security
- GPS:
-
global positioning system
- HRI:
-
human–robot interaction
- IEEE:
-
Institute of Electrical and Electronics Engineers
- JAEA:
-
Japan Atomic Energy Agency
- MSHA:
-
US Mine Safety and Health Administration
- NASA:
-
National Aeronautics and Space Agency
- NERVE:
-
New England Robotics Validation and Experimentation
- NIST:
-
National Institute of Standards and Technology
- NZDF:
-
New Zealand Defence Force
- OOTL:
-
human out of the loop control
- RFID:
-
radio frequency identification
- ROV:
-
remotely operated vehicle
- SLAM:
-
simultaneous localization and mapping
- SWRI:
-
Southwest Research Institute
- UAV:
-
unmanned aerial vehicle
- UGV:
-
unmanned ground vehicle
- UMV:
-
unmanned marine vehicle
- USAR:
-
urban search and rescue
- USV:
-
unmanned surface vehicle
- UUV:
-
unmanned underwater vehicle
- WTC:
-
World Trade Center
References
A. Davids: Urban search and rescue robots: from tragedy to technology, IEEE Trans. Intell. Syst. 17(2), 81–83 (2002)
A. Davids: Urban search and rescue robots: from tragedy to technology, IEEE Trans. Intell. Syst. 17(2), 1541–1672 (2002)
D. McClean: World Disasters Report 2010. Focus on Urban Risks (IFCR, Geneva 2010)
National Fire Protection Association: Standard on Operations and Training for Technical Rescue Incidents (NFPA, Avon 1999)
United States Fire Administration: Technical Rescue Program Development Manual (USFA, Avon 1996)
R.R. Murphy, A. Kleiner: A community-driver roadmap for the adoption of safety security and rescue robot, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics, Linköping (2013) pp. 1–4
J.A. Barbera, C. DeAtley, A.G. Macintyre, D.H. Parks: Medical aspects of urban search and rescue, Fire Eng. 148, 88–92 (1995)
R. Murphy, D. Riddle, E. Rasmussen: Robot-assisted medical reachback: A survey of how medical personnel expect to interact with rescue robots, Proc. IEEE Int. Work. Human Robot Interact. Commun. (HRI) (2004) pp. 301–306
R. Murphy, M. Konyo, P. Davalas, G. Knezek, S. Tadokoro, K. Sawata, M. Van Zomeren: Preliminary observation of HRI in robot-assisted medical response, Proc. 4th ACM/IEEE Int. Conf. Human Robot Interact. (HRI) (2009) pp. 201–202
R. Murphy, A. Rice, N. Rashidi, Z. Henkel, V. Srinivasan: A multi-disciplinary design process for affective robots: Case study of Survivor Buddy 2.0, Proc. IEEE Int. Conf. Robotics Autom. (ICRA) (2011) pp. 701–706
A.C. Yoo, G.R. Gilbert, T.J. Broderick: Military robotics combat casualty extraction and care. In: Surgical Robotics. Applications and Visions, ed. by J. Rosen, B. Hannaford, R.M. Satava (Springer, New York 2011) pp. 13–32
M. Yim, J. Laucharoen: Towards Small Robot Aided Victim Manipulation, J. Intell. Robotic Syst. 64, 119–139 (2011)
A. Kleiner: Mapping and Exploration for Search and Rescue with Humans and Mobile Robots (University of Freiburg, Freiburg 2008)
R.R. Murphy, S. Stover: Gaps analysis for rescue robots, Proc. ANS Shar. Sol. Emerg. Hazard. Environ. (2006)
C. Schlenoff, E. Messina: A robot ontology for urban search and rescue, ACM Work. Res. Knowl. Represent. Auton. Syst., New York (2005) pp. 27–34
R. Murphy, J. Casper, J. Hyams, M. Micire, B. Minten: Mobility and sensing demands in USAR, Proc. IECON Sess. Rescue Eng., Vol. 1 (2000) pp. 138–142
M. Angermann, M. Frassl, M. Lichtenstern: Mission review of aerial robotic assessment – ammunition explosion Cyprus 2011, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2012) pp. 1–6
S. Kawatsuma, M. Fukushima, T. Okada: Emergency response to Fukushima-Daiichi accident: summary and lessons learned, Ind. Robot 39(5), 428–435 (2012)
S. Tadokoro, T. Takamori, S. Tsurutani, K. Osuka: On robotic rescue facilities for disastrous earthquakes – from the great Hanshin-Awaji (Kobe) earthquake, J. Robotics Mechatron. 9(1), 46–56 (1997)
R. Murphy: Human-robot interaction in rescue robotics, IEEE Trans. Syst. Man Cybern. 34(2), 138–153 (2004)
M.J. Micire: Evolution and field performance of a rescue robot, J. Field Robotics 25(1-2), 17–30 (2008)
R.R. Murphy: Disaster Robotics (MIT Press, Cambridge 2014)
K. Pratt, R. Murphy, S. Stover, C. Griffin: Conops and autonomy recommendations for vtol small unmanned aerial systems based on Hurricane Katrina operations, J. Field Robotics 26(8), 636–650 (2009)
R. Murphy, E. Steimle, E. Griffin, C. Cullins, M. Hall, K. Pratt: Cooperative use of unmanned sea surface and micro aerial vehicle at hurricane Wilma, J. Field Robotics 25(3), 164–180 (2008)
V.G. Ambrosia, S. Wegener, T. Zajkowski, D.V. Sullivan, S. Buechel, F. Enomoto, B. Lobitz, S. Johan, J. Brass, E. Hinkley: The Ikhana unmanned airborne system (UAS) western states fire imaging missions: From concept to reality (2006–2010), Geocarto Int. 26(2), 85–101 (2011)
R.R. Murphy, E. Steimle, M. Hall, M. Lindemuth, D. Trejo, S. Hurlebas, Z. Medina-Cetina, D. Slocum: Robot-assisted bridge inspection, J. Intell. Robotic Syst. 64(1), 77–95 (2011)
P. Srivaree-Ratana: Lessons learned from the great Thailand flood 2011: How a UAV helped scientists with emergency response and disaster aversion, Proc. AUVSI Unmanned Syst. North Am. (2012)
R. Murphy, S. Stover, H. Choset: Lessons learned on the uses of unmanned vehicles from the 2004 Florida hurricane season, AUVSI Unmanned Syst. North Am. (2005)
J. Lester, A. Brown, J. Ingham: Christchurch cathedral of the blessed sacrament: Lessons learnt on the Stabilization of a significant heritage building, Proc. Annu. Conf. N. Z. Soc. for Earthq. Eng. (NZSEE) (2012) pp. 1–11
N. Michael, S. Shen, K. Mohta, Y. Mulgaonkar, V. Kumar, K. Nagatani, Y. Okada, S. Kiribayashi, K. Otake, K. Yoshida, K. Ohno, E. Takeuchi, S. Tadokoro: Collaborative mapping of an earthquake-damaged building via ground and aerial robots, J. Field Robotics 29(5), 832–841 (2012)
R.R. Murphy, K.L. Dreger, S. Newsome, J. Rodocker, B. Slaughter, R. Smith, E. Steimle, T. Kimura, K. Makabe, F. Matsuno, S. Tadokoro, K. Kon: Marine heterogeneous multi-robot systems at the great eastern japan tsunami recovery, J. Field Robotics 29(5), 819–831 (2012)
F. Ferreira: ICRA Japan Forum: Preliminary report on the disaster and robotics in Japan, IEEE Robotics Autom. Mag. 18(3), 116 (2011)
M. Shibuya: Using micro-rov's in the aftermath of japan's tsunami. Underwater Intervention (2012)
G.-J. Kruijff, V. Tretyakov, T. Linder, F. Pirri, M. Gianni, P. Papadakis, M. Pizzoli, A. Sinha, E. Pianese, S. Corrao, F. Priori, S. Febrini, S. Angeletti: Rescue robots at earthquake-hit Mirandola, Italy: A field report, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2012) pp. 1–8
R. Murphy, S. Stover: Rescue robots for mudslides: A descriptive study of the 2005 La Conchita mudslide response, J. Field Robotics 25(1–2), 3–16 (2008)
R.R. Murphy: Trial by fire, IEEE Robotics Autom. Mag. 11(3), 50–61 (2004)
L. Goldwert: Minneapolis honors bridge collapse victims, http://www.cbsnews.com/news/minneapolis-honors-bridge-collapse-victims/(2007)
FBI: Photo gallery FBI response to minneapolis bridge collapse, http://www2.fbi.gov/page2/august07/bridge1.htm(2007)
K. Pratt, R. Murphy, J. Burke, J. Craighead, C. Griffin, S. Stover: Use of tethered small unmanned aerial system at Berkman Plaza II collapse, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2009) pp. 134–139
S. Tadokoro, R. Murphy, S. Stover, W. Brack, M. Konyo, T. Nishimura, O. Tanimoto: Application of active scope camera to forensic investigation of construction accident, Proc. IEEE Int. Work. Adv. Robotics Its Soc. Impacts (ARSO) (2009) pp. 47–50
K. Ohno, S. Kawatsuma, T. Okada, E. Takeuchi, K. Higashi, S. Tadokoro: Robotic control vehicle for measuring radiation in Fukushima Daiichi nuclear power plant, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2011) pp. 38–43
ROV World: Raising the Costa Concordia live – ROVworld subsea information (2012)
Hydro International: ROV survey of the Costa Concordia grounding site, http://www.hydro-international.com/news/id5324-ROV_Survey_of_the_Costa_Concordia_Grounding_Site_video.html(2012)
Draganfly: RCMP corporal Doug Green interviewed on CKOM John Gormley Live – Draganflyer X4-ES used in life-saving mission, http://www.draganfly.com/news/2013/05/13/rcmp-corporal-doug-green-interviewed-on-ckom-john-gormley-live-draganflyer-x4-es-used-in-life-saving-mission/(2013)
T. Linder, V. Tretyakov, S. Blumenthal, P. Molitor, D. Holz, R. Murphy, S. Tadokoro, H. Surmann: Rescue robots at the collapse of the municipal archive of Cologne city: A field report, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2010) pp. 1–6
R.R. Murphy, R. Shoureshi: Emerging Mining Communication and Mine Rescue Technologies (Mine Safety and Health Administration, Arlington 2008)
R.R. Murphy, J. Kravitz, S. Stover, R. Shoureshi: Mobile robots in mine rescue and recovery, IEEE Robotics Autom. Mag. 16(2), 91–103 (2009)
K. Nagatani, S. Kiribayashi, Y. Okada, K. Otake, K. Yoshida, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, M. Fukushima, S. Kawatsuma: Emergency response to the nuclear accident at the Fukushima Daiichi nuclear power plants using mobile rescue robots, J. Field Robotics 30(1), 44–63 (2013)
G.M. Kulali, M. Gevher, A.M. Erkmen, I. Erkmen: Intelligent gait synthesizer for serpentine robots, Proc. IEEE Int. Conf. Robotics Autom. (ICRA) (2002) pp. 1513–1518
A. Wolf, H.B. Brown, R. Casciola, A. Costa, M. Schwerin, E. Shamas, H. Choset: A Mobile hyper redundant mechanism for search and rescue tasks, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., Vol. 3 (2003) pp. 2889–2895
D. Campbell, M. Buehler: Stair descent in the simple hexapod “RHex”, Proc. IEEE Int. Conf. Robotics Autom. (ICRA) (2003) pp. 1380–1385
R.M. Voyles, A.C. Larson: Terminatorbot: A novel robot with dual–use mechanism for locomotion and manipulation, IEEE/ASME Trans. Mechatron. 10(1), 17–25 (2005)
J. Tanaka, K. Suzumori, M. Takata, T. Kanda, M. Mori: A mobile jack robot for rescue operation, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2005) pp. 99–104
R. Murphy, T. Vestgaarden, H. Huang, S. Saigal: Smart lift/shore agents for adaptive shoring of collapse structures: A feasibility study, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2006)
W.E. Green, P.Y. Oh: A fixed-wing aircraft for hovering in caves, tunnels, and buildings, Proc. Am. Control Conf. (2006) pp. 1–6
V. Kumar, D. Rus, S. Singh: Robot and sensor networks for first responders, IEEE Pervasive Comput. 3(4), 24–33 (2004)
D. Kurabayashi, H. Tsuchiya, I. Fujiwara, H. Asama, K. Kawabata: Motion algorithm for autonomous rescue agents based on information assistance system, Proc. IEEE Int. Symp. Comput. Intell. Robotics Autom. (2003) pp. 1132–1137
K.W. Sevcik, W.E. Green, P.Y. Oh: Exploring search-and-rescue in near-earth environments for aerial robots, Proc.IEEE/ASME Int. Conf. Adv. Intell. Mechatron. (2005) pp. 693–698
A. Birk, S. Carpin: Rescue robotics: a crucial milestone on the road to autonomous systems, Adv. Robotics 20(5), 596–605 (2006)
A. Kleiner, C. Dornhege, R. Kuemmerle, M. Ruhnke, B. Steder, B. Nebel, P. Doherty, M. Wzorek, P. Rudol, G. Conte, S. Durante, D. Lundstrom: RoboCupRescue – Robot league team RescueRobots Freiburg (Germany), Proc. 10th RoboCup 2006 (2006)
J. Pellenz, D. Paulus: Stable mapping using a hyper particle filter, Proc. 13th RoboCup 2006 (2010) pp. 252–263
A. Nuchter, K. Lingemann, J. Hertzberg: Mapping of rescue environments with kurt3d, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2005) pp. 158–163
A. Kleiner, C. Dornhege: Mapping for the support of first responders in critical domains, J. Intell. Robotic Syst. 64(1), 7–31 (2011)
B. Yamauchi: A frontier-based approach for autonomous exploration, Proc. IEEE Int. Symp. Comput. Intell. Robotics Autom. (1997) pp. 146–151
C. Dornhege, A. Kleiner: A frontier-void-based approach for autonomous exploration in 3d, Adv. Robotics 27(6), 459–468 (2013)
A. Jacoff, E. Messina, B. Weiss, S. Tadokoro, Y. Nakagawa: Test arenas and performance metrics for urban search and rescue robots, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (2003) pp. 3396–3403
S. Wirth, J. Pellenz: Exploration transform: A stable exploring algorithm for robots in rescue environments, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2007) pp. 1–5
Y. Okada, K. Nagatani, K. Yoshida, S. Tadokoro, T. Yoshida, E. Koyanagi: Shared autonomy system for tracked vehicles on rough terrain based on continuous three-dimensional terrain scanning, J. Field Robotics 28(6), 875–893 (2011)
E. Magid, T. Tsubouchi, E. Koyanagi, T. Yoshida, S. Tadokoro: Controlled balance losing in random step environment for path planning of a teleoperated crawler-type vehicle, J. Field Robotics 28(6), 932–949 (2011)
R. Sheh, B. Hengst, C. Sammut: Behavioural cloning for driving robots over rough terrain, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (2011) pp. 732–737
C. Dornhege, A. Kleiner: Behavior maps for online planning of obstacle negotiation and climbing on rough terrain, Proc.IEEE/RSJ Int. Conf. Intell. Robots Syst. (2007) pp. 3005–3011
M. Andriluka, P. Schnitzspan, J. Meyer, S. Kohlbrecher, K. Petersen, O. Von Stryk, S. Roth, B. Schiele: Vision based victim detection from unmanned aerial vehicles, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (2010) pp. 1740–1747
A. Kleiner, R. Kummerle: Genetic mrf model optimization for real-time victim detection in search and rescue, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (2007) pp. 3025–3030
R. Hahn, D. Lang, M. Haselich, D. Paulus: Heat mapping for improved victim detection, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2011) pp. 116–121
A. Birk, S. Markov, I. Delchev, K. Pathak: Autonomous rescue operations on the iub rugbot, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2006)
R.R. Murphy, J. Burke: The safe human-robot ratio, Human-Robot Interactions in Future Military Operations, ed. by M. Barnes, F. Deutsch (Ashgate, Farnham 2010) pp. 31–49
M. Endsley: Design and evaluation for situation awareness enhancement, Proc. 32nd Annual Meet. Hum. Factors Soc. (1988) pp. 97–101
J.L. Drury, J. Scholtz, H.A. Yanco: Awareness in human-robot interactions, Proc.IEEE Int. Conf. Syst. Man Cybern. (2003) pp. 912–918
J. Casper, R. Murphy: Workflow study on human-robot interaction in usar, Proc.IEEE Int. Conf. Robotics Autom. (2002) pp. 1997–2003
J. Burke, R. Murphy, M. Coovert, D. Riddle: Moonlight in miami: An ethnographic study of human-robot interaction in usar, Hum.-Comput. Interact. 19(1/2), 85–116 (2004)
R. Murphy, J. Burke, S. Stover: Field Studies of Safety Security Rescue Technologies Through Training and Response Activities, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., Vol. 2 (2004) pp. 1089–1095
N. Sato, F. Matsuno, T. Yamasaki, T. Kamegawa, N. Shiroma, H. Igarashi: Cooperative Task Execution by a Multiple Robot Team and its Operators in Search and Rescue Operations, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., Vol. 2 (2004) pp. 1083–1088
T. Arai, E. Pagello, L. Parker: Editorial: Advances in multi-robot systems, IEEE Trans. Robotics Autom. 18(5), 655–661 (2002)
D.P. Stormont, A. Bhatt, B. Boldt, S. Skousen, M.D. Berkemeier: Building better swarms through competition: Lessons learned from the AAAI/Robocup rescue robot competition, Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (2003) pp. 2870–2875
J. Suarez, R. Murphy: A survey of animal foraging for directed, persistent search by rescue robotics, Proc. IEEE Int. Symp. Saf. Secur. Rescue Robotics (2011) pp. 314–320
A. Ferworn, A. Sadeghian, K. Barnum, H. Rahnama, H. Pham, C. Erickson, D. Ostrom, L. Dell'Agnese: Urban search and rescue with canine augmentation technology, Proc. IEEE/SMC Int. Conf. SystemSyst. Eng. (2006) pp. 334–338
L. Yihan, S.S. Panwar, S. Burugupalli: A mobile sensor network using autonomously controlled animals, Proc.1st Int. Conf. Broadband Netw. (BROADNETS) (2004) pp. 742–744
R. Murphy: Rats, robots, and rescue, IEEE Intell. Syst. 17(5), 7–9 (2002)
S. Tadokoro, H. Kitano, T. Takahashi, I. Noda, H. Matsubara, A. Hinjoh, T. Koto, I. Takeuchi, H. Takahashi, F. Matsuno, M. Hatayama, J. Nobe, S. Shimada: The robocup-rescue project: A robotic approach to the disaster mitigation problem, Proc. IEEE Int. Conf. Robotics Autom. (ICRA) (2000) pp. 4089–4094
T. Takahashi, S. Tadokoro: Working with robots in disasters, IEEE Robotics Autom. Mag. 9(3), 34–39 (2002)
I.R. Nourbakhsh, K. Sycara, M. Koes, M. Yong, M. Lewis, S. Burion: Human-robot teaming for search and rescue, IEEE Pervasive Comput. 4(1), 72–79 (2005)
H. Kitano, S. Tadokoro: Robocup-rescue: A grand challenge for multi-agent and intelligent systems, AI Magazine 22(1), 39–52 (2001)
J. Scholtz, B. Antonishek, J. Young: A field study of two techniques for situation awareness for robot navigation in urban search and rescue, Proc. IEEE Int. Work. Robot-Hum. Interact. Commun. (2005) pp. 131–136
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Video-References
Video-References
-
 :
: -
Assistive mapping during teleoperationavailable from http://handbookofrobotics.org/view-chapter/60/videodetails/140
 :
:Rights and permissions
Copyright information
© 2016 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Murphy, R.R., Tadokoro, S., Kleiner, A. (2016). Disaster Robotics. In: Siciliano, B., Khatib, O. (eds) Springer Handbook of Robotics. Springer Handbooks. Springer, Cham. https://doi.org/10.1007/978-3-319-32552-1_60
Download citation
DOI: https://doi.org/10.1007/978-3-319-32552-1_60
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-32550-7
Online ISBN: 978-3-319-32552-1
eBook Packages: EngineeringEngineering (R0)