
Abstract
The famous statue Pietà Rondanini by Michelangelo Buonarroti (sculpted in the second half of 1500) was recently moved to a new position in a museum in Castello Sforzesco, Milan. In this new location, the vibration levels, due to the close presence of underground tracks, has been considered worthy of specific attention; therefore both the Municipality of Milan and the Cultural Heritage ministry asked for the design of a new base capable of mitigating the vibration input to the statue. In addition, since Milan is a seismic area (although with moderate risk), it was also required to include in the base design an anti-seismic device. The protection from the underground action (which is in the range between 16 and 80 Hz) requires the development of a system with low natural frequency and rather limited damping, to have a steep filtering after resonance. However in case of an earthquake, the low frequency range would be strongly excited, with the eventual risk of an extreme event like rocking. A second device is thus introduced to protect the statue from earthquakes, consisting in a low friction slide of the same type as those used to protect buildings from the same kind of events. The coupling between the two types of protection imposed a careful design and testing of the complete system made up of the base and the statue. The design of the base was developed by means of an experimental-numerical approach. A measuring campaign using a large 6 degrees of freedom shaking table was used to test a full scale prototype of the base supporting a marble 1:1 copy of the statue. A multibody model of the full installation (complete base and statue) was developed, qualified by means of experimental data, and used to optimize the parameters, such as the mass distribution, positions of the elastomeric supports and the damping of the devices. The final system is now installed in the museum, protecting the Pietà.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
2.1 Introduction
Preserving historical statues from earthquakes and repeated ambient vibrations is a crucial issue for many museums and historical sites. One among the most effective methods introduced in recent years has been the use of sliding isolators to protect historical monuments from earthquake shakes. Only in a very few cases [1, 2] the requirements were for a statue protection from both earthquakes and ambient vibrations. Vestorni et al. [3] investigated the capability of a base isolation system constituted of multi-stage high damping laminated rubber bearings to reduce the seismic risk for statues. Specifically, a parametric analysis was carried out to determine the sensitivity of system response to the variation of base isolation system parameters. Petrovcic et al. [4] instead studied the applicability of base isolation systems made of elastomeric bearings for the protection of cultural heritage. The performed analysis defined the maximum height-to-width ratio of the objects to be mounted on the elastomeric isolators in order to prevent rocking and considering different soil conditions.
Several sliding isolator devices are instead compared in [5], while Jampole et al. [6] developed and tested a low-cost sliding isolation system for protecting light-frame residential structures form earthquakes.
The device described in this paper instead combines a sliding isolator to mitigate seismic vibrations due to earthquakes with passive anti-vibration rubbers for filtering ambient vibrations.
The main issue concerned with this kind of devices consists in the interaction between the two mitigating systems, which are designed to filter out different vibration kinds, acting with different frequency, amplitude and probability of occurrence. In fact ambient vibrations are certain and continuous, they have low levels and are present in a wider band, while earthquakes have lower frequencies, higher amplitudes but they occur rarely.
That’s why, after a thorough examination of the specific shape and size for each statue, the proper isolation system has to be tailored to each different artifact, to optimize the best effectiveness and safety of the adopted final isolating system.
In this research, the new vibration isolation system for Michelangelo’s Pietà Rondanini has been numerically investigated.
The statue was in fact recently moved to a new location, to give this masterpiece its proper value inside a new museum: however the proximity to a subway has required the designers of the new museum to face the not yet known problem of the marble response to a daily vibration dose. A fit to the purpose isolation system has then been set-up.
Based on a series of vibration tests carried out on a prototype of the base, also relying on the use of a 1:1 marble copy of the statue, a multibody model of the whole system has been developed.
The validation of the model allows not just to reproduce the observed base-statue behavior, but also to go on trying a further optimization, to eventually increase the system effectiveness, by working on a proper combination of stiffness and damping of the elements making up the base, or modifying the actual geometry.
The final results show a good agreement between the model and the experimental results and allow to verify the choices adopted in modeling the system. It should be noted that the main target of this research is to develop a model for the isolating system and to verify its performance. The details of the isolating system are thus not included in this work.
2.2 The Isolating System
The isolation system was designed to accomplish the following requirements: (1) to separate the statue from any kind of ground vibration, (2) to sustain the weight of the statue and its supporting structure, (3) to damp any eventual higher amplitude motion and (4) to restore the statue to its original position after an earthquake. To achieve these targets, the isolation system consists of two parts: a sliding unit for mitigation of the seismic vibrations; these low friction slides are equipped with devices to restore the statue to its initial position in case of displacement from the rest position. The second part consists of a vibration-mechanical filter, placed on top of the sliding unit, made up of anti-vibration rubbers for isolating ground-borne vibrations generated by the underground trains. A sketch of the whole system is given in Fig. 2.1.

Schematic plan of the statue and the isolating system
The sliding unit is made up of two orthogonal low-friction linear motion bearings, allowing the displacement of the system made up of the base and the statute in the horizontal plane. The restoring function is provided by a belt connecting the sliding plates. The sliding unit was designed so to have a response to displacements induced by an earthquake lower than 2 mm/s and a natural frequency in the horizontal direction of about 0.3 Hz (the global mass of the base and the statue is approximately 2850 kg). To avoid undesired movements of the base and statue in absence of an earthquake, the belts of the sliding unit are preloaded: no relative movements occur if the applied force is lower than 500 N.
The ambient vibration-isolation is achieved by means of 13 rubber elements fixed between the sliding unit (lower base, Fig. 2.1) and a plate sustaining the statue support (upper base, Fig. 2.1). The position of the rubber bearings is shown in Fig. 2.2. As it can be seen, a modular layout was adopted, made up of nine modules, some of them connected to the slides, while the others are dummy elements. This allows to easily change position and type of the rubber bearings to reach the target performance for the vibrations-isolating system and to make any eventual maintenance an easier task.

Position of rubber bearings
To guarantee the best mechanical filtering action for all kinds of vibrations, a compromise solution has been looked for by selecting rubber bearings allowing to get a natural frequency in the vertical (i.e. perpendicularly to the ground) and horizontal directions of approximately 8 and 3 Hz, respectively.
The main characteristics of the isolating system are given in Table 2.1.
2.3 Experimental Tests
In this section a summary of the measurement results relevant to this paper will be presented. The measurements were carried out by using a shaking table capable of exciting the structure in the vertical and the horizontal directions at the same time.
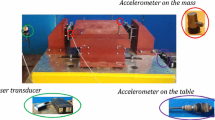
Figure 2.3 shows the experimental setup: a 1:1 marble copy of the Pietà Rondanini statue is placed on a support, which is positioned on the previously described isolation system. The lower part of the sliding unit of the isolation system is rigidly connected with a shaking table (called in the following seismic base). The shaker, from CESI Ricerche, can be actuated and controlled independently over 6 axes.

Experimental setup, position of accelerometers and reference system
Figure 2.3 also shows some of the accelerometers used to reconstruct the vibration path from the table to the statue. Two independent measurement systems were adopted with different resolution and full scale.
Several input signals were applied by means of the shaking table to the statue and the isolating system. In the following, the results concerned with sweep sine tests are reported. Imposed sweep sine test consisted in a chirp signal having a constant displacement amplitude (25 mm) in the range of 0.1–0.45 Hz and then a constant acceleration profile in the range 0.63–50 Hz with rate of 1 oct/min.
The FRFs (Frequency Response Functions) in the X-direction and Z-direction are respectively shown in Figs. 2.4 and 2.5. The acceleration of the shaking table (point 1 in Fig. 2.3) is used as reference.

Amplitude and phase of the FRFs between the X-acceleration of the seismic base (point 1) and the X-acceleration of points 2, 3 and 6 (see Fig. 2.3). Sweep test along the X-direction

Amplitude and phase of the FRFs between the Z-acceleration of the seismic base (point 1) and the Z-acceleration of points 3, 4, 5 and 6 (see Fig. 2.3). Sweep test along the Z-direction
More in detail, Fig. 2.4 shows the FRFs (amplitude and phase) between the acceleration imposed by the shaking table and the acceleration of points 2, 3 and 6 (make reference to Fig. 2.3) along the X-axis when the excitation is imposed along the same direction. Point 2 and 3 are respectively placed on the lower (lower base, Fig. 2.1) and the upper base (upper base, Fig. 2.1) of the vibrations-isolating system. Point 6 is instead placed on the support of the statue, near to its feet.
As it can be seen, the natural frequency of the horizontal motion of the whole system is about 0.3 Hz and it is governed by the restoring system. Below this frequency the whole system moves together.
Frequencies of the pitch and horizontal motions of the part of the system above the sliding unit are located in the range 0.3–6 Hz. Above 6 Hz vibrations along the X-direction of the statue support are filtered out by the vibrations-isolation system (red line and black dashed-dotted line), while the lower base of the vibrations-isolating system (which is above the sliding unit) and the seismic base (i.e. the shaking table) move together (blue solid line), i.e. there is no sliding between them.
Figure 2.5 shows the FRFs (amplitude and phase) between the acceleration imposed by the shaking table and the acceleration of points 3, 4, 5 and 6 (make reference to Fig. 2.3) along the Z-axis when the excitation is imposed along the same direction. A resonance peak at 8.7 Hz can be clearly seen concerned with the motion along the Z-axis of the whole system. Above this frequency, vibrations are filtered out by the vibrations-isolation system.
2.4 Multibody Model of the Isolating System
To investigate any possible improvements of the isolating device, a multibody (MB) model of the whole system, including the statue and its support, was developed in ADAMS/View environment.
The developed model aims at reproducing the experimental set-up used during the above described tests.
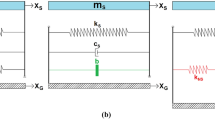
The model consists of three rigid bodies respectively representing (Figs. 2.6 and 2.7):

Multibody model of the isolating system

Multibody model of the isolating system, top view
-
the seismic base, which imposes the motion to the isolating system and the statue;
-
the lower base of the vibrations-isolating system (lower base, Fig. 2.1), which is placed above the linear motion bearings;
-
the assembly of the upper plate of the vibrations-isolating system (upper base, Fig. 2.1), the support of the statue and the Rondanini Pietà statue, which is placed above the rubber bearings. This part consists of the cylindrical parts and the pink plate according to the Fig. 2.1.
Inertial properties of the bodies constituting the model were estimated through direct measurements or 3D solid models.
The sliding unit was modeled as a nonlinear three-component force field. Into details, a linear spring-damper system reproduces the vertical damping and stiffness of the linear motion bearings.
The global force in the horizontal direction is instead given by:
where F μ represents the Coulomb sliding friction force of the linear motion bearings, while F k and F d are the elastic and the dissipative components of the restoring force respectively. While the elastic force is linear (the belt stiffness is given in Table 2.1), the dissipative force is a nonlinear function of the sliding speed, as depicted in Fig. 2.8. As it can be seen, to reproduce the preload of the restoring belt avoiding undesired movements of the statue, a force of 500 N is provided when the sliding speed is equal to zero.

Dissipative component of the restoring force as a function of the sliding speed
The vibrations-isolating device was modeled by means of 13 bushings reproducing stiffness and damping properties of the rubber bearings (see Table 2.1).
Input to the model is the motion imposed to the seismic base.
2.4.1 Numerical-Experimental Comparison
To verify the capability of the developed MB model to reproduce the response of the isolating system, numerical results were compared with experimental data collected during the tests described in Sect. 2.3. On this purpose, the same input displacement imposed to the seismic base during the experimental tests was provided to the MB model.
As an example of the obtained results, the comparison between numerical and experimental data obtained during a sweep tests along the Z and the X directions is presented in the following. Specifically Fig. 2.9 refers to the sweep test along the Z direction, while Figs. 2.10, 2.11, and 2.12 are concerned with the sweep test along the X direction. Into details, Fig. 2.9 shows the FRF between the Z-acceleration of the seismic base (point 1 in Fig. 2.3 and input to the model) and the one at the upper base of the vibrations-isolating system (point 3 in Fig. 2.3).

Numerical-experimental comparison: FRF between the acceleration along the Z direction of the seismic base (point 1) and the upper base (point 3)

Numerical-experimental comparison: FRF between the acceleration along the X direction of the seismic base (point 1) and the lower base (point 2)

Numerical-experimental comparison: FRF between the acceleration along the X direction of the seismic base (point 1) and the upper base (point 3)

Numerical-experimental comparison: FRF between the acceleration along the X direction of the seismic base (point 1) and statue support (point 6)
Figures 2.10, 2.11, and 2.12 respectively show the FRFs between the acceleration along the X-direction of the seismic base (point 1 in Fig. 2.3 and input to the model) and those of (a) the lower base of the vibrations-isolating system (point 2 in Fig. 2.3), (b) the upper base of the vibrations-isolating system (point 3 in Fig. 2.3), and (c) the statue support which is point 6 of Fig. 2.3.
In all the figures, results of the MB model are depicted in red, while dashed blue lines represent the experimental data. A good agreement between numerical and experimental data can be seen for all the reported FRFs in the frequency range 0–20 Hz, where the rigid vibration modes of the system are found.
2.4.2 Sensitivity Analysis
To investigate any possible improvement of the isolating system, a sensitivity analysis was carried out by varying some parameters of the model. On this purpose, it must be considered that the stiffness of the restoring belts and of the rubber bearings cannot be significantly varied, since they have to guarantee the functions for which they have been introduced. They must work only in case of an earthquake (belts) and filter out at best the ground-borne vibrations under normal operating conditions, therefore requiring the lowest possible stiffness (rubber elements). Moreover, the vertical damping of the rubber bearings has to be kept as low as possible to filter out at best vibration frequencies higher than 10 Hz.
So, for a first sensitivity analysis the following parameters were varied:
-
the height of the support of the statue, i.e. the height of the assembly above the upper plate of the vibrations-isolating system; in particular the height of the support was varied in a range ±20 cm;
-
distribution of stiffness between the rubber bearings constituting the vibrations-isolating system. Specifically, vertical stiffness of rubber bearings placed at the four corners of the isolation system (specified by blue color module in Fig. 2.2) were increased, while stiffness of the other rubbers was decreased in order to maintain the frequency of the vertical motion at about 8.7 Hz, but reducing the pitch motion of the statue support.
In Fig. 2.13 the result of the sensitivity analysis on the height of the statue support is shown. The FRFs between the acceleration along the X direction of the seismic base and those of point 6 (i.e. the statue support, blue lines) and of the head of the statue (black lines) are reported. A sweep sine test along the X direction is applied. Measurements are also reported (red lines).

It can be clearly seen that by decreasing the height of the support, the resonance frequencies increase, although the maximum amplitudes remain quite similar. It is worth remembering that simulations were carried out considering the statue perfectly fixed to the support, which might not be the case as the statue bottom cannot be perfectly flat.
The effect of changing the spring stiffness of the rubber bearings placed at the four corners of the vibrations-isolating system is presented in Fig. 2.14. In this figure, the FRFs between the acceleration along the X direction of the seismic base and those of point 6 (blue lines) and of the head of the statue (black lines) are reported. A sweep sine test along the X direction is applied. Measurements are also reported (red lines).

The stiffness along the Z-direction of the four rubber bearings placed at the corners of the vibrations-isolating system was increased by three times and at the same time the overall stiffness in the Z-direction was kept equal to the original value by decreasing the stiffness of the others rubber bearings. In other words the ratio between the vertical stiffness and torsional stiffness of the vibrations-isolating system was changed. It can be clearly seen in Fig. 2.14 that by increasing the stiffness of the rubber bearings placed at the corners, the resonance frequency associated with the pitch motion (at about 2.7 Hz) increases and this effect is more evident on the head of statue, where a reduction in the peak amplitude is also observed.
2.5 Conclusions
In this research the new isolating system for the famous statue Pietà Rondanini by Michelangelo was investigated. As mentioned earlier, the aim of this research was to develop a model of the isolating system and to verify the performance of the designed one. Vibration measurements were carried out to evaluate the performance of the designed system for an earthquake and in case of ground-borne vibrations due to the close presence of the underground. In other words, the target of these measurements was first of all to validate the model and to achieve further information to optimize the performance of the isolating system. According to the difficulties and costs of repeating tests under different scenarios, a multibody model was developed to predict the dynamic performance of the complete system by means of parameter sensitivity. The model was implemented in ADAMS/View according to the information received from the isolating system manufacturer. Results of the developed MB model are in good agreement with the experimental data in Z and X directions, although some improvements may be introduced for a better reproduction of the behavior of the system in the X-direction according to the complexity of the real structure (especially the nonlinear damping of the restoring system). The developed model was then used to perform a sensitivity analysis on the isolation system parameters, such as stiffness and damping of rubber bearings of the vibrations-isolation device, geometry of the statue supporting base, etc. The performed analysis showed that decreasing the height of statue support leads to an increase of pitch natural frequency, but a reduction of peak amplitudes. Moreover, varying stiffness distribution of rubber bearings by increasing stiffness at corners limits pitching of the statue.
References
Silva, Vibration and Noise Handbook, Taylor & Francis Group, LLC, 2005
Zhong-Ming, X., Xuan, C., Zi-Liang, Y.: The study displacement spectrum on sliding base isolation. In: 6th International Conference on Advance in Experimental Structural Engineering, University of Illinois, Urbana-Champaign, United States, 2015
Vestorni, F., Di Cintio, S.: Base isolation for seismic protection of statues. In: 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 2000
Petrovcic, S., Koren, D., Kilar, V.: Applicability of base isolation made of elastomeric isolators for the protection of cultural heritage. Urban Challenge, 20(1), 220–228 (2009)
Girish, M., Pranesh, M.: Sliding isolation systems: state-of-the-art review. J. Mech. Civil Eng. 2278–1684, 30–35 (2013)
Jampole, E.A., Swensen, S.D., Fell, B., Miranda, E., Deierlein, G.G.: Dynamic testing of a low-cost sliding isolation system for light-frame residential structures. In: Tenth U.S. National Conference on Earthquake Engineering, Frontiers of Earthquake Engineering, Anchorage, Alaska, 21–25 July 2014
Acknowledgements
The authors gratefully acknowledge the Municipality of Milano for the financial support and the precious control role, then CESI Ricerche, THK, Miyamoto and the Conservation Institute of the Italian Ministry of Cultural Heritage (ISCR) for the precious cooperation offered through the different activities of the project.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 The Society for Experimental Mechanics, Inc.
About this paper
Cite this paper
Cigada, A., Sabbioni, E., Siami, A., Zappa, E. (2016). Modeling and Testing of the Anti-Vibration Base for Michelangelo’s Pietà Rondanini. In: Di Miao, D., Tarazaga, P., Castellini, P. (eds) Special Topics in Structural Dynamics, Volume 6. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-319-29910-5_2
Download citation
DOI: https://doi.org/10.1007/978-3-319-29910-5_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-29909-9
Online ISBN: 978-3-319-29910-5
eBook Packages: EngineeringEngineering (R0)