
Abstract
Modern navigation systems for the automotive market do require accurate and reliable sensors for precise implementation of the dead-reckoning algorithms needed for accurate map positioning in all different driving situations and circumstances. STMicroelectronics has been developing inertial sensors for these applications since 2009, with the introduction of the first 3-axis low-g accelerometers and the first ever fully integrated 3-axis gyroscope, now accepted as market standards and adopted in a myriad of in-dash infotainment systems. As happened earlier in other segments such as consumer, sensor integration is emerging in automotive to optimize performance and costs. Complete integration of acceleration and rate sensors on the same die can be enabled only by an advanced planar silicon technology, which is capable of creating independent mechanical structures that are diverse by nature. The tiny ASM330LXH is the smallest and highest-performance 6-axis Inertial Measurement Unit qualified to AEC-Q100 for non-critical automotive applications like navigation and telematics. This paper addresses the major integration challenges and presents the new device, with focus on the benefits versus traditional discrete solutions.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
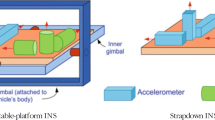
1 Inertial Sensors and Positioning Systems
Inertial sensors are at the core of today’s advanced positioning systems. A degradation of the signal coming from satellites may lead to a progressive loss of accuracy, which eventually prevents the operability of the system.
Dead Reckoning (aka DR) algorithms [1], based on sophisticated mathematical models, are fueled from the information gathered from a set of sensors, namely distance sensors (odometer, wheel speed, ABS wheel tick) and yaw rate sensors (gyroscope, differential wheel pulses, differential wheel speed).
STMicroelectronics has been at the forefront of the developments in this area for several years, both with the launch of the TeseoTM satellite position receivers and with the introduction of the first multi-axial inertial sensors [2, 3].
ST turnkey solution based on TeseoII, equipped with a proprietary DR algorithm, with a 6-axis sensing capability given by A3G4250D (3-axis gyroscope) and AIS328DQ (3-axis low-g accelerometer), is a widely recognized platform in the market, used by key players in the industry.
ST’s Multi Sensor Dead Reckoning (MSDR) generates accurate position, heading, height and speed measurements, providing a fusion of GNSS with a number of sensors, bringing strong value to customer experience (Fig. 1):

Dead reckoning approach at ST
-
Automatic Temperature Compensation (ATC): it compensates each sensor for thermal effects, guaranteeing long-term accuracy (up to 90 %) even in the absence of the GNSS signal
-
Automatic Free Mount (AFM): the tilt angle of the PCB is measured by the 3-axis accelerometer and input in, thus guaranteeing performance independent of the way the device is mounted on the vehicle
-
Sensor Over UART (SOA): this allows the customer’s host processor to collect sensor data and feed them to Teseo DR SW via UART
-
3D DR (3DR): this provides an indication of position variation in vertical direction, even in the absence of the GNSS signal
The latest satellite positioning receiver from ST, the TeseoIII, is capable of receiving signals from all existing satellite navigation systems, including GPS (USA), Galileo (Europe), GLONASS (Russia), QZSS (Japan), and BEIDOU (China) [4, 5].
2 Sensors Integration: Key Challenges
Sensors integration has been applied in the consumer and mobile market for a few years already [6, 7]. Advanced smartphones, for instance, are equipped with multi-axial sensors with 6 or even 9 Degree of Freedom (DOF).
Automotive system makers, driven by the requests coming from car makers to reduce overall cost and improve sensing performance, are now pushing silicon manufactures to pursue an increase in component integration.
This is not an easy task to achieve; while it is almost straightforward to assemble multiple dies in a single and bigger package (Fig. 2), it is more challenging to reduce the number of dies and target a package with a small footprint (Fig. 3).

Traditional SiP solution

Advanced system integration
Silicon technology is the enabler of such a high level of integration.
ST’s proprietary MEMS technology, called THELMA (Thick Epitaxial Layer for Micro-gyroscopes and Accelerometers), allows the integration, on the same piece of silicon, two diverse-by-nature mechanical structures like accelerometers and gyroscopes.
This technology guarantees an accurate control of all micro-mechanical features by using manufacturing and control techniques typical of IC processes.
Two silicon substrates are bonded together: the first one with the actual mechanical structure and the second one (the cap) to protect the movable elements during the over-molding process. The sensor micro-cavity is sealed and maintained throughout life at controlled atmosphere and pressure.
A getter layer (a patented alloy made of Zirconium and Vanadium) is included in the wafer-level hermetic package of gyroscopes to achieve a stable low bonding pressure value (<1 mbar) and therefore obtain low damping and reduced power consumptions for the MEMS resonators (Fig. 4).

Double cavity for 6-axis inertial module
After being activated with specific thermal treatments, the getter layer absorbs all active gases present in the hermetic cavity, such as O2, CO, CO2, N2, leaving only noble gases in the cavity (Fig. 5).

Working principle of a getter layer
The residual amount of noble gases in the cavity depends on two parameters of the chemical reaction:
-
% of the noble gases in the initial mixture
-
Initial pressure set point
The getter layer helps to maintain a vacuum in the cavity throughout the life of the device.
A key challenge during manufacturing is to build up, control, and guarantee, on the same die, two cavities with substantially different operating pressures: while the Coriolis resonating principle of the gyroscope does require a near-to-vacuum level for performance optimization, the accelerometer on the other side achieves the best performance when the cavity pressure is close to ambient.
After extensive R&D efforts and significant manufacturing experience gained through producing several tens of millions of units for consumer applications, ST is exporting this innovative concept into more demanding automotive applications.
3 The New 6-Axis Solution
Modern navigation systems for the automotive market require accurate and reliable sensors for precise implementation of the dead-reckoning algorithms needed for accurate map positioning in all different driving situations and circumstances.
As with the majority of inertial sensors produced by ST, the ASM330LXH is composed of two dies embedded into an over-molded plastic package.
The single-die processing chain, designed using an advanced silicon technology with 130 nm lithography (HCMOS9A), includes both gyroscope and accelerometer processing chains (Figs. 6 and 7).

Block diagram of the gyroscope signal chain

Block diagram of the accelerometer signal chain
Main features of the gyro section are the following:
-
The device operates with a closed loop in the driving and an open loop in the sensing chains; both chains are discrete-time to implement precise gains and time constants
-
The clock of the whole system is obtained from the well-controlled resonant frequency of the MEMS driving section
-
The input C2V blocks convert the capacitive variation into an electrical signal; the following stages regenerate a continuous time sinusoid from the discrete-time input
-
The total phase delay of the closed loop driving satisfies the Barkhausen criteria
-
A comparator generates the base clock for the system, which is fed to a Phase Locked Loop
-
An Automatic Gain Control stage is used to control the MEMS oscillation amplitude
-
The three axes are read out and processed in a time-multiplexed fashion
-
The amplitude-modulated input signal is coherently demodulated and then filtered by a switched capacitor filter
-
Each axis is processed by a dedicated 14 bit SAR ADC.
Main features of the accelerometer section are the following:
-
Time multiplexing approach: one measure chain for all 3 axes
-
Charge amplifiers with a Switched Capacitor circuit with CDS
-
Fully differential sensing chain from sensor to ADC (all common modes are rejected)
-
The chain features a 14-bit fully differential SAR A/D converter, with 25 µs conversion time and low current consumption.
The second die includes both mechanical elements for the 3-axis gyroscope and the 3-axis accelerometer (Fig. 8).

Dual-in-one sensor
The working principle of the gyroscope is based on the patented “Beating Heart” concept introduced by ST back in 2010 [2, 6], while the low-g accelerometer is based on the traditional comb-finger approach for in-plane sensing and the suspended cantilever approach for out-of-plane sensing.
The device embeds a list of innovative features:
-
3 main operating modes:
-
Only accelerometer active and gyro in power down
-
Both accelerometer and gyro active at the same ODR (synchronized)
-
Both device in power down
-
Switching from one mode to another is done by writing in the device control registers
-
-
High level of flexibility granted to the user:
-
Setting of the measurements ranges
-
Output Data Rate selectable
-
Selectable accelerometer anti-aliasing filter
-
-
Enhanced noise performance
-
Embedded temperature sensor, with 50 Hz refresh rate and 16LSB/°C temp sensitivity
-
Temperature compensation embedded.
The algorithm for temperature compensation, able to reduce offset drifts for both sensors, is of great help in improving the device’s performance. The characterization data taken on a sample of 30 units soldered on board show very narrow distributions of key parameters like zero-rate (ZRL, Fig. 9) and zero-g (Fig. 10) levels across the extended temperature range (−40 to +85 °C).

Gyroscope ZRL offset drift coefficient

Zero-g offset drift coefficient
Key advantages offered by ASM330LXH versus other solutions in the market can be summarized hereafter:
-
Smallest package for a 6-axis combo for in-dash navigation systems
-
High level of silicon integration guarantees a higher reliability level in the field
-
Dual-in-one approach and single ASIC interface allows perfect sensor output synchronization to achieve the most accurate DR algorithms
-
Extreme user flexibility
-
High stability in temperature and in time.
4 Trends
The trends in this domain are very exciting.
At ST, one of the first steps is to integrate the ASM330LXH in the TeseoIII positioning platform, as well as enrich the system with additional sensors that could boost overall accuracy, like pressure sensors and electronic compasses.
In general, the traditional navigation market may radically change in the near future with the entry of new companies, who will use their expertise to enable the seamless fusion between portable devices and the currently protected car environment. Internet availability, V2V (Vehicle-to-Vehicle) and V2I (Vehicle-to-Infrastructure) communications will become standard in the coming years.
Moreover, positioning systems will be integrated into a master-system providing key information to other sub-systems dedicated to safety-related tasks like vehicle dynamics and ADAS. Smart tires equipped with sensors will be also part of this Copernican revolution.
5 Conclusions
To guarantee people’s safety, autonomous vehicles, which will reach significant diffusion by the mid of the next decade, need sophisticated ADAS systems, along with reliable positioning information with an accuracy below 10 cm, about the size of an orange.
Additional sensors like pressure and electronic compass may be used to achieve this challenging goal.
Thanks to a wide experience in the automotive domain, advanced electro-mechanical technologies, a best in class manufacturing machine, and solid design and engineering experience, ST is correctly positioned to fulfill the forthcoming demand of precise sensors for future systems, which will merge navigation, vehicle dynamics, and ADAS.
References
Ferraresi M, Giuffrida G, Palella N (2013) Innovative MEMS sensors in advanced positioning systems. In: Fischer-Wolfarth J, Meyer G (eds) Advanced microsystems for automotive applications 2013. Springer, Cham
Ferraresi M, Marinoni A (2012) Tri-axial MEMS gyroscope for automotive applications, SSI conference 2012. ISBN 9783-8007-3423-8
Ferraresi M, Pozzi S (2009) MEMS sensors for non-safety applications, AMAA
Mattos PG (2011) Accuracy and availability trials of the consumer GPS/GLONASS receiver in highly obstructed environments, IoN GNSS-2011 conference, Portland, Oregon
Mattos PG, Pisoni F (2012) Multi-constellation—to receive everything, IoN GNSS-2012 conference, Portland, Oregon
Vigna B (2011) STMicroelectronics Masters the Art and the Science of MEMS, Semicon Taiwan
Vigna B (2011) Tri-axial MEMS gyroscopes and six degree-of-freedom motion sensors, IEEE, IEDM11-662
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Ferraresi, M. (2016). Inertial Sensors Integration for Advanced Positioning Systems. In: Schulze, T., Müller, B., Meyer, G. (eds) Advanced Microsystems for Automotive Applications 2015. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-319-20855-8_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-20855-8_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-20854-1
Online ISBN: 978-3-319-20855-8
eBook Packages: EngineeringEngineering (R0)