
Abstract
Active control of vibrations can outperform passive systems in certain applications, e.g. when broadband damping is requested or when several orders of a periodic disturbance have to be cancelled. To generate dynamic forces for the active control system, inertial mass actuators are frequently used. Mainly, they comprise a force generating element driving a single-degree-of-freedom oscillator which is coupled to the structure to be controlled. Thus, those actuators can also be used for retrofitting of existing structures or for prototyping purposes. In this paper, a design for an inertial mass actuator utilizing piezoceramic actuators is studied. Since those actuators integrate both stiffness and force generation into one element, this enables more compact and mechanically robust designs. With respect to the future integration into industrial applications, standard multilayer piezoelectric actuators are considered to decrease the costs of the system and allow for a high reliability. Usually, an inertial mass actuator should possess a low resonance frequency in order to enable operation over a broad frequency range. Since the stiffness of piezoelectric multilayer actuators is rather high, a lever mechanism is designed which transforms the stiffness of the piezoelectric element into the desired range. An analytical model of the inertial mass actuator is derived and parameter studies are performed to investigate the characteristics of the design. A prototype is set up and the main parameters like resonance and block force are experimentally validated. Finally, the integration of the actuator into an active vibration control system for a lightweight structure is described.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Inertial mass actuators are a common component in active vibration control (AVC) systems [1]. The force of those actuators is generated by an inertial mass, which is excited by an active element. In order to mount the inertial mass to the structure, a soft spring is commonly used. Thus, an inertial mass actuator can be considered as a single-degree-of-freedom-oscillator which is driven above its resonance frequency.
Due to the need for a stiffness to mount the inertial mass and limitations of the maximum stroke delivered by the active element, the challenge of designing an inertial mass actuator is mainly to find a compromise between contradictory requirements, e.g. low resonance frequency for broadband operation and low static deflection and low inertial mass.
In many cases, electrodynamic actuation is used. For instance, inertial mass actuators of this type were successfully used for vibration control in cars [2], trains [3], or even for building floors [4]. The integration of piezoelectric actuators has also been investigated. Since those solid state actuators possess an inherent stiffness, they can carry the inertial mass while providing high dynamic forces. However, due to the high stiffness of the piezo elements the design of an inertial mass actuator with a low resonance frequency usually includes some lever mechanism for stroke amplification and stiffness reduction. In [5] several concepts are proposed, and a piezoelectric disk actuator is used in a prototype set up. Also bending beam configurations were studied, either with integrated stack actuators [6] or foils [7].
In this work, a design for a piezoelectric driven inertial mass actuator is proposed. In contrast to other designs, the basic idea is to develop a modular design which can be easily adapted to different requirements in terms of resonance frequency or block force.
In the following sections, first the basic characteristics for inertial mass actuators are summarized. The proposed design of the inertial mass actuator is introduced, and analytical formulations are derived for the main parameters block force and resonance frequency. A functional prototype is set up, and the characteristics are validated by experiments.
2 Inertial Mass Actuators
As shown in Fig. 1, an inertial mass actuator can be considered a spring-mass system with the stiffness \( k \) and the inertial mass \( m, \) enhanced by a damping \( d \) and an actuator force \( F_{A} \) [8]. Above the resonance frequency a rather constant force proportional to the actuator force is excited (Fig. 1). Therefore the resonance frequency of the actuator should be quite below its lowest working frequency. The relation between the block force \( F \) and \( F_{A} \) is given by the transfer function:
where \( \omega_{0} = \sqrt \frac{k}{m} \) is the resonance frequency of the system and \( \theta = \frac{d}{{2m\omega_{0} }} \) denotes the damping coefficient.

Inertial mass actuator and its block force frequency response function
3 Design of the Piezoelectric Inertial Mass Actuator
The aforementioned considerations are applied to the design of an inertial mass actuator with integrated piezoelectric transducers.
Similar to the well-known bending beam with applied or integrated piezoelectric actuators [6] the elongation of the piezoelectric actuator is transformed into a bending moment, which deflects the tip of the beam. An attached mass excites a normal force and a moment in the root of the beam. The latter can be compensated for by the application of a symmetric set up with two actuators, which is not considered here, though.
3.1 Basic Equations
In this work, the integration of piezoelectric actuators and the supporting beam is simplified in order to enable a modular, reconfigurable actuator system (Fig. 2). Two piezoelectric actuators are mounted at a distance to the neutral axis of the beam. The inertial mass is intended to serve also as a lever for the actuation. By driving both actuators out of phase, a moment is generated at the tip of the beam, which causes a movement of the mass and in turn a reaction force at the mounting. For the analysis, generic piezoelectric actuators are assumed, which are described by their longitudinal stiffness \( k_{A} \) and block force\( F_{A} \). Both actuators are coupled to the tip of the beam by a lever of length \( h \) with respect to the neutral axis of the beam. The beam itself is characterized by its length\( l \), Young’s modulus \( E \) and the moment of inertia\( I_{y} \). Since the actuators are coupled mechanically by spherical end caps, only normal forces are assumed to be transmitted at the mounting points of the actuators. The effect of the preloading screw is studied in the next section.

Beam with coupled piezoelectric actuators, left design, middle: mechanical model, right simplified model
This system can be regarded as a special case of an elastic stroke amplification or stiffness transformation. A simplified model is used to estimate the characteristics, i.e. the resulting overall stiffness in the bending direction of the beam with respect to the stiffness of the beam and the actuator, and the block force \( F \) generated in this direction with respect to the actuator force.
Since the inertial mass at the tip is expected to be much heavier than this actuation unit, the mass of the latter is neglected here in order to simplify the calculations using Euler’s beam theory. The system can be represented by a bending beam with a tip force and moment M y . The respective tip displacement w and angle \( w^{{\prime }} \) can be found by superposition:
The moment \( M_{y} \) at the tip due to the actuator force \( F_{A} \) and the restoring force of the actuator stiffness \( k_{A} \) can be expressed by:
The free stroke \( w \) at the tip of the beam due to the actuator force \( F_{A} \) can be calculated by setting the force \( F \) to zero, eliminating \( w^{{\prime }} \) by solving Eqs. 2 and 3 for the moment \( M_{y} \) and putting the result into Eq. 2:
In a similar manner, the stiffness \( k = \frac{F}{w} \) can be calculated by setting \( F_{A} = 0 \):
The block force of the actuator system can be calculated by:
3.2 Higher Order Effects
If higher active force amplitudes are required, the actuators have to be preloaded electrically and mechanically. The preloading compressive force on the actuator causes a tensile normal force on the bending beam. The integration of this normal force into the equations leads to a more complex differential equation (linearized) for the axially loaded Euler beam:
For compression (positive) forces \( F_{N} \) the stiffness of the beam decreases (a critical load \( F_{N} \) that produces zero beam stiffness defines the buckling problem for the beam). Tensile (negative) forces cause additional beam stiffness.
If a significant amount of mass is considered, the tip mass cannot be regarded as a point mass any more. The model thus has to be enhanced by incorporating the distance of the center-of-gravity of the actuator to the end of the beam.
Also, as for nearly every inertial mass actuator, the assumption of a single-degree-of-freedom oscillator is not valid over an infinitely large frequency range. In the design considered here, a higher order resonance is caused by the real tip mass not being a point mass, but also having a rotational moment of inertia \( J \), resulting in a rotational degree-of-freedom for the tip mass. The natural frequency \( \omega_{0,R} \) can be derived by
with the overall rotational stiffness \( k_{R} \) that is mainly influenced by the actuator stiffness and the their distance from the neutral axis of the beam.
3.3 Mechanical Design of the Inertial Mass Actuator
According to the model (Fig. 2) a prototype was built, that is shown in Fig. 3.

Implemented prototype of the inertial mass actuator
A thin beam is clamped between two steel blocks, which form the mounting of the inertial mass actuator. The width of the beam is large compared to its length to prevent torsion. The hole pattern of the mounting is suited for a connection to a shaker or a heavy breadboard. On the other side of the beam the inertial mass is attached. It consists of an equal number of steel blocks on each side of the beam which can be changed easily for experiments. The mass can be moved on the beam via slotted holes, which is necessary for the assembling of the piezoelectric actuators. These are monolithic multilayer actuators by CeramTec with a base area of 7.1 × 7.6 mm and a length of 30 mm. On both sides of the piezoelectric actuators spherical ceramic caps are glued to reduce damaging shear forces. To ensure the force transmission of the actuators and to avoid loosening and therefore nonlinear behavior the actuators have to be preloaded. This is done by screws in the two masses next to the beam with a distance of 7.5 mm to the beam’s surface. The tips of the preloading screws are concave as counterparts of the actuator’s ceramic caps. There are corresponding holes at the mounting at the same distance from the beam. This prevents shifting of the piezoelectric actuators in operation.
3.4 Test Set up
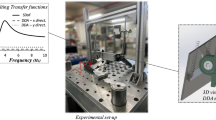
To analyze the dynamic characteristics of the inertial mass actuator, tests were performed. The whole actuator was mounted to a rigid, heavy base plate which can be treated as an infinitely small mechanical admittance in the considered frequency range (Fig. 4). The tip mass was instrumented with an accelerometer in order to estimate the block force from the acceleration of the mass by calculating \( F_{B} = m{\ddot{\it{x}}}. \)

Test set up for dynamic analysis of the inertial mass actuator
3.5 Experimental Validation
In order to avoid a pre-stressing of the beam, which would cause a stiffening effect and in turn a higher resonance frequency, the actuators were mounted just with a small preload. This reduces the usable amplitude range. However, this set up is still useful for experimental tests with small driving voltages.
To test the modularity of the concept, two different configurations were examined, each with a tip mass of approx. 1 kg, same type of piezoelectric actuators, but a different bending beam. The frequency response of the block force was calculated from Eq. 1, using the results from Eqs. 6 and 7. The design parameters can be found in Table 1.
The results from the FRF measurement and the calculation are compared in Fig. 5. The value for the damping had to be fitted to the measurement, which resulted in a damping coefficient of \( \theta = 2\,\% \). Obviously, the calculation procures quite good estimates for the resonance frequency and the dynamic behavior over a relevant frequency range. Thus the relatively simple formulae from Eqs. 6 and 7 can be used to find proper design parameters for the inertial mass actuator.

Comparison of the measured (solid line) and calculated (dashed line) FRF for configuration A (left) and configuration B (right)
Afterwards, the FRF measurements were repeated with a preload on the actuators. The magnitude of the preloading force was estimated from the turning angle, flank lead of the preloading screw (0.75 mm), and the stiffness values for the beam and the actuators to:
where \( k_{B} = Ebd/l \) is the longitudinal stiffness of the beam and \( \Delta S \) is the travel of the preloading screw. The comparison of the measured resonance frequencies and the calculated for the actuator configuration A is shown in Fig. 6. Obviously, the effect of preloading is significant and has to be taken into account. It has to be noted, that this holds also for the case of electrical preloading of the actuators, which results in a static displacement. However, this also allows for tuning of the actuator to desired frequencies, which will be used in the experiment described in the next section.

Variation of resonance frequency with respect to a preloading force on the actuators
4 Application to an Active Vibration Control System
To evaluate the performance in an active vibration control system, the actuator was mounted to a lightweight truss structure (Fig. 7). The actuator was instrumented with accelerometers at its base and at the inertial mass.

Test set up for the active control experiment (left) and detail of the actuator instrumentation (right)
In the first step, the actuator was tuned. Usually, an inertial mass actuator is tuned well below the resonances of the host structures. In the case considered here, a structural mode was in the vicinity of the resonance of the passive, mechanically preloaded inertial mass actuator, which resulted in a vibration absorption effect at 43 Hz (Fig. 8, left). This effect was enhanced by choosing an electrical preload of 50VDC, which resulted in an absorption frequency of 50 Hz. Although this frequency does not match the structural resonance at 48 Hz exactly, this configuration served well as a basis for adjusting the active control system.

Tuning of the actuator to the first elastic mode of the truss and control results
In the next step, the active control system was set up and tuned. Two control loops were implemented. First, an active velocity feedback loop was used to enhance the damping of the inertial mass actuator, which caused a better performance of the absorption at the first mode at 48 Hz and a higher robustness against interaction between different control loops. Second, an acceleration feedback loop was tuned to the second mode of the truss at 125 Hz (Fig. 8, right). Since the actuator is not symmetric, it is exciting a bending moment at its base additional to the normal force. This results in lowering of a higher resonance frequency from 180 to 160 Hz and a deterioration of the vibration amplitudes there.
5 Conclusions
A concept for a piezoelectric driven inertial mass actuator, using a bending beam as an elastic lever, was developed and implemented. The modular design allows for tuning of the resonance by changing components. Due to the use of the bending beam also as a preloading spring, the actuator resonance is shifted during preloading. However, this effect can also be used to apply the actuator as a tuned vibration absorber at its resonance and as an active element at higher frequencies. Future developments can include the self-tuning of the absorber by automatic control of the electrical preload. Furthermore, the design should be improved towards a symmetric set up with two inertial masses in order to compensate for the bending moments and enhance the generated normal forces.
References
Winberg M, Johansson S, Claesson I (2004) Inertial Mass Actuators—Understanding and Tuning. In: Proceedings of the ICSV 11, St. Petersburg
Belgacem W, Alain B, Masson P (2012) Active vibration control on a quarter-car for cancellation of road noise disturbance. J Sound Vib 331(14):3240–3254
Persson P, Lagö TL, Norberg A (1999) Active control of sleeper-induced sound in a high speed train. In: Proceedings of the sixth international congress on sound and vibration. pp 1747–1752
Díaz IM, Reynolds P (2009) Robust saturated control of human-induced floor vibrations via a proof-mass actuator. Smart Mater Struct 18(12):125024. doi:10.1088/0964-1726/18/12/125024
Lesieutre G, Rusovici R, Koopmann G, Dosch J (1995) Modeling and characterization of a piezoceramic inertial actuator. In: Proceedings of 36th Structures, Structural Dynamics and Materials Conference
Konstanzer P, Jänker P, Storm S (2007) A piezo inertial force generator optimized for high force and low frequency. Smart Mater Struct 16:1260–1264
Bös J, Janssen E, Kauba M, Mayer D (2008) Active vibration reduction applied to the compressor of an air-conditioning unit for trams. In: Proceedings of Acoustics
Preumont A (2011) Vibration control of active structures. Springer, Berlin
Acknowledgements
This work was partly conducted within the framework of the LOEWE center AdRIA. The support by the state of Hesse is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Herold, S., Mayer, D., Melz, T., Röglin, T. (2015). Design and Test of a Piezoelectric Inertial Mass Actuator for Active Vibration Control. In: Sinha, J. (eds) Vibration Engineering and Technology of Machinery. Mechanisms and Machine Science, vol 23. Springer, Cham. https://doi.org/10.1007/978-3-319-09918-7_52
Download citation
DOI: https://doi.org/10.1007/978-3-319-09918-7_52
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-09917-0
Online ISBN: 978-3-319-09918-7
eBook Packages: EngineeringEngineering (R0)