
Abstract
A generic one-step Integrated Digital Image Correlation (I-DIC) inverse parameter identification approach is introduced that enables direct identification of constitutive model parameters by intimately integrating a Finite Elements Method (FEM) with Digital Image Correlation (DIC), directly connecting the complete time sequence of experimental images to the sought model parameters. The problem is cast into a transparent single-minimization formulation with explicit expression of the unknowns, being the material properties and, optionally, experimental uncertainties such as misalignments. The tight integration between FEM and DIC creates an information dialogue that yields accurate material parameters while providing necessary regularization to the DIC problem, making the method robust and noise insensitive. Through this method the versatility of the FEM method is translated to the experimental realm, simplifying the existing experiments and creating new experimental possibilities.
A convincing demonstration of the method has been achieved by successful identification of three challenging models from three very different (virtual) experiments, all thoroughly analyzed on accuracy and noise sensitivity: identification of a mixed-mode interface model from a mixed-mode delamination test, a 10-parameter history- and rate-dependent glassy polymer model from a simple tensile test, and simultaneous identification of two material models from a single bulge test of a structured membrane.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Digital image correlation (DIC)
- Integrated DIC
- Inverse parameter identification
- Finite elements method (FEM)
- Numerical validation
29.1 Introduction
This paper discusses a method which provides the direct identification of constitutive model parameters by intimately integrating an (analytical or FEM) mechanical model with Digital Image Correlation (DIC), connecting the experimentally obtained images for all time increments directly to the unknown material parameters. The problem is formulated as a single minimization problem which incorporates all the experimental data. It allows for precise specification of the unknowns, which can be, but is not limited to, the unknown material properties. The tight integration between the mechanical model and DIC creates enables direct identification of the unknown parameters while providing necessary regularization of the DIC problem, making the method robust and noise insensitive. Through this approach, the versatility of the FEM method can be translated to the experimental realm, enhancing the analyses of existing experiments and creating new experimental possibilities.
29.2 Principle
The basis of the introduced method is the global digital image correlation (G-DIC) (cf. [1, 2]) can be explained as follow. Considering two images, (f) and (g). (f) leads to the reference state, and (g) the response of the structure under a prescribed loading. One can introduce a cost function, \( I\left(\overrightarrow{u}\right) \), a function of the displacement \( \overrightarrow{u} \). This function gives a measure over a zone of interest (ZoI) between both pictures (f) and (g), when (g) has been corrected with the displacement \( \overrightarrow{u} \):
This approach is defined as a global one since the displacement has a definition over the entire zone of interest. The objective within the image correlation is to reduce this cost function, in other words, the objective is to find the optimal displacement, \( {\overrightarrow{u}}^{opt} \), leading to the smallest value of \( I\left({\overrightarrow{u}}^{opt}\right) \). This step can only be conducted by defining ∪, a kinematically admissible space for \( \overrightarrow{u} \). One can then write:
The novelty of the presented method lies in the definition that defines this admissible kinematic space with respect to the delamination test and the delamination mechanisms that occur. One denotes this Global-DIC as an integrated one aproach, i.e. I-GDIC, because information about the material behavior has been included within the Global-DIC procedure, see Fig. 29.1.

Block diagram of the proposed IDIC framework
The method is demonstrated from three challenging models identified from three very different (virtual) experiments, all thoroughly analyzed on accuracy and noise sensitivity: (a) identification of a mixed-mode interface model from a mixed-mode delamination test, (b) a 10-parameter history- and rate-dependent glassy polymer model from a simple tensile test, and (c) simultaneous identification of two material models from a single bulge test of a structured membrane.
29.3 Identification of a Mixed-Mode Interface model from a Mixed-Mode Delamination Test
In this case, we are after the interface behavior, therefore, a parameterized description of the interface traction profile in the process zone [using 3 degrees of freedom (D.O.F.’s)] is used to define the kinematically admissible space for \( \overrightarrow{u} \). This is schematically shown in Fig. 29.2a, b. The I-GDIC algorithm optimizes the displacement field to the measured displacement field, thereby directly yielding the correct crack tip opening displacement (CTOD) profile, Fig. 29.2d, but the routine also directly yield the optimum parameter values of the D.O.F.’s for describing the interface traction profile. Together, the optimized CTOD and interface traction profile can be combined to reconstruct the interface material behavior in the form of its traction-separation curve (Fig. 29.2d).

(a) Schematic of the parameterized description of the interface traction profile in the process zone, where the length of the arrows indicate the magnitude of the traction. (b, d) the interface traction profile (b) and its corresponding crack tip opening displacement (CTOD) profile (d) depicted as function of its three parameters, i.e. tc, xc, and x0, where x0 is the position at the interface of first deviation from elastic interface behavior, while tc is the maximum traction, which occurs at interface position xc and which corresponds to the critical opening delta. The CTOD profile (d) results directly from the optimized displacement field reconstructed by the I-GDIC algorithm. (c) The reconstructed interface behavior in the form of its traction-separation curve (c) is computed by combining the interface traction profile with optimized parameters (b) with the corresponding optimized CTOD profile (d)
The optimized CTOD is extracted from the converged displacement solution, which is combined with the optimized interface traction profile (resulting from the optimized D.O.F.’s) to reconstruct the interface material behavior in the form of its traction-separation curve, which is shown in Fig. 29.3. For each of the 5 different material interface behaviors tested, ranging in fracture toughness and ductility, two traction-separation curves are plotted: the input one (dashes lines) used for the finite element analysis and the output curve (red lines), which are recovered from the images through the introduced I-GDIC procedure. The figure shows that for all these different material interface behaviors the input traction-separation curve can be recovered fairly accurate, which indicates the accuracy and robustness of the developed I-GDIC algorithm is extracting the material interface behavior from measured images of the interfacial crack propagation of a delamination test.

Comparison of the input FE traction separation laws (dashed lines) with the traction separation law recovered with the I-GDIC routine (solid lines), for five different material interface behaviors used in the FE simulations. Note that these results are preliminary and may be subject to future change
29.4 10-Parameter History- and Rate-Dependent Glassy Polymer Model from a Simple Tensile Test (Preliminary Results)
As a second proof-of-principle example the constitutive properties of PolyCarbonate (PC) are identified. PC is a glassy polymer which is rate dependent (visco-elastic) and history dependent. The polymer chains tend to diffuse to a low energy state which compacts the material, thereby increasing the yield stress. Material flow induces rejuvenation which has a reverse effect on the yield stress, causing flow-induced softening. It is this softening behavior combined with the stress- and temperature-dependent viscosity which makes this material a challenging test case for the proposed IDIC method.
As a proof-of-principle experiment the identification procedure was initiated with an initial guess for each parameter equal to 110 % of their reference value. After 30 iterations convergence is reached, and values for all 10 EGP parameters have been identified. To evaluate the quality of the identification, the residual field (stack) has been analyzed. The residual field is reduced to almost zero, the only visible features are due to the sub-pixel interpolations.
A typical identification procedure for the EGP model requires a plethora of experiments, each using separate samples to identify each parameter individually. This is not only cumbersome, but identifying the history dependent aging parameter is troublesome since it tends to vary from sample to sample, or even within one sample. The proposed IDIC method showed the ability to identify all 10 EGP parameters under the condition that a reasonable initial guess is provided. The convergence radius can be improved by differentiating between parameters with high sensitivity and other which have less sensitivity (Fig. 29.4).

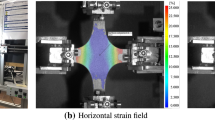
(a) The contour of the mesh at the undeformed, intermediate, and deformed state. The adopted DIC pattern is depicted in the mesh. (b) A sketch of the influence of the 10 EGP parameters on the stress–strain response. (c) The x-component of the displacement field for three time increments and for a single y-plane, for all time increments. (d) The convergence behavior of the IDIC routine, identifying all 10 EGP material parameters
29.5 Simultaneous Identification of Two Material Models from a Single Bulge Test of a Structured Membrane (Preliminairy Results)
Instead of identifying multiple constitutive parameters of a single material, it is also possible to identify the constitutive parameters of heterogeneous samples. For instance the material response of micro-scale specimens where the geometrical length scale interacts with the intrinsic microstructural length scales, tends to deviate from the bulk material response and is influenced by neighboring materials or phases. For those cases, it is interesting to identify the materials closely to the situation where they are applied in the eventual device. Examples of this are the structured metal interconnects adhered to elastomer substrates as encountered in stretchable electronic applications.
The presented test case in this example consists of a 2 μm thick elastomer membrane (1 × 6 mm2) with a line of high purity aluminum (Al) deposited on top of the elastomer membrane. The Al film has a thickness of 200 nm, and is 100 μm wide covering the full 6 mm length of the sample. The sample is loaded in a bulge test setup, where a pressure difference is applied causing the membrane to bulge outwards [3], see Fig. 29.5a. The bulge profile (including the surface roughness) is measured using optical confocal microscopy.

(a) The elastomer membrane sample dimensions with aluminum structure on top, deformed to a bulged shape by a pressure difference. (b) The experimental reference material response and the fitted models which will be used as a reference material in the virtual experiment for the TPU elastomer substrate (top), fitted with a neo-Hookean model, and the high purity aluminum (bottom), fitted with an elasto-plastic model with isotropic hardening. (c) The x-component of the displacement field for three time increments and for a single y-plane, for all time increments. (d) Convergence of the IDIC method in terms of relative error for this bulge test example
As a first proof-of-principle for this example, the proposed IDIC method is applied to identify the five constitutive parameters, see Fig. 29.5b, where the initial guess is taken equal to 130 % of to the reference values for the material parameters. Similarly, as with the previous (EGP) example, the residual field (stack) is analyzed for present patterns in the residue (not shown). The residual almost vanishes completely, which is expected since no additional acquisition noise was added. The only remaining visible features in the residual are the scars left behind by the sub-pixel interpolation.
For this virtual experiment, the reference displacement field is again known, enabling a direct comparison between the obtained and reference displacement field, see Fig. 29.5c. Compared to conventional DIC algorithms, where typically a displacement error of 1 % is considered as good, the achieved adequate accuracy of the proposed method is noteworthy, see Fig. 29.5d.
The bulge test example was chosen to prove that the proposed IDIC method can be applied to identify the constitutive parameters of multiple materials in one sub-structured monolithic sample. This is important, especially for micro-electronics applications, where different materials shaped in thin and small structures deviate in properties from their bulk counterparts. The identification of these parameters is a challenge at that scale. The presented example shows that the adopted identification procedure is robust (i.e. relatively insensitive to the initial guess and acquisition noise). Additionally, this example showed the relative ease with which the proposed IDIC method was extended to incorporate quasi-3D topographical profilometer data.
29.6 Conclusions
A generic one-step Integrated Digital Image Correlation (I-DIC) inverse parameter identification approach is introduced that enables direct identification of constitutive model parameters by intimately integrating a Finite Element Method (FEM) with Digital Image Correlation (DIC), directly connecting the complete time sequence of experimental images to the sought model parameters. A convincing demonstration of the method has been achieved by successful identification of three challenging models from three very different (virtual) experiments, all thoroughly analyzed on accuracy and noise sensitivity: identification of a mixed-mode interface model from a mixed-mode delamination test, a 10-parameter history- and rate-dependent glassy polymer model from a simple tensile test, and simultaneous identification of two material models from a single bulge test of a structured membrane.
References
van Beeck J, Neggers J, Schreurs PJG, Hoefnagels JPM, Geers MGD (2013) Quantification of roughening in metal sheet stretching using global digital image correlation. Exp Mech. doi: 10.1007/s11340-013-9799-1
Neggers J, Hoefnagels JPM, Hild F, Roux S, Geers MGD (2014) Direct stress–strain measurements from bulged membranes using topography image correlation. Exp Mech. doi: 10.1007/s11340-013-9832-4
Neggers J, Hoefnagels JPM, Geers MGD (2012) On the validity regime of the bulge equations. J Mater Res 27(09):1245–1250
Acknowledgements
The authors acknowledge Marc van Maris for his general support on the (in-situ) mechanical experiments in the Multi-Scale lab.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 The Society for Experimental Mechanics, Inc.
About this paper
Cite this paper
Hoefnagels, J.P.M., Neggers, J., Blaysat, B., Hild, F., Geers, M.G.D. (2015). A Generic, Time-Resolved, Integrated Digital Image Correlation, Identification Approach. In: Jin, H., Sciammarella, C., Yoshida, S., Lamberti, L. (eds) Advancement of Optical Methods in Experimental Mechanics, Volume 3. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-319-06986-9_29
Download citation
DOI: https://doi.org/10.1007/978-3-319-06986-9_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-06985-2
Online ISBN: 978-3-319-06986-9
eBook Packages: EngineeringEngineering (R0)