
Abstract
Rotor–stator rubbing is occasional problem faced by rotating machines especially during startups and shut downs when passing through their critical speeds. The rubbing often occurs in rotating machinery at position with small clearances and can sometimes cause catastrophic breakdown of machine. So it is important to develop reliable tools for rub diagnosis. This paper investigates partial rub occurrence during constant and slightly variable speed operation and try to define vibration diagnosis patterns for its detection with Hilbert Huang Transform (HHT). The HHT is relatively new method which includes Empirical Mode Decomposition (EMD) and the Hilbert Transform. Diagnostic tool is tested on laboratory test rig for rotor to stator contact dynamics research at two different rotor operating conditions i.e. without rotor–stator contact and with partial rotor–stator rub. Measurements were performed with non-contact eddy current displacement sensors. Results are presented in the shape of HHT spectra of Intrinsic Mode Functions (IMF) and are compared to classical FFT spectra and spectrograms based on Short Time Fourier Transform (STFT). Rotor orbits are also presented to additionally verify rubbing condition.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Contact between rotor and stator during the operation of the rotating machine is usually called rubbing and it represents a defect that could lead to serious failure as well as downtime losses. The requirement of higher machine efficiency has reduced clearances between rotor and stator and thus increased the possibility of rubbing occurrences. Depending on rotor and stator structure configuration rotor-stator contact phenomena can be classified as a rigid rotor disc-rigid stator contact [1–4], bladed disc-stator contacts [5] and rotor-stator contact in retainer bearings of the active magnetic bearings [6, 7].
From an experimental analysis point of view [8–10], rotor vibration are usually measured by accelerometers at bearing pedestals and/or with non-contacting probes relatively from bearing pedestals to shaft in two radial directions (horizontal, vertical) and if needed in axial direction too.
The vibration generated by rotor–stator contact always contains nonlinear and non-stationary signals. Recently, a number of new methods have been proposed to analyze such signals. One of the promising methods is the Hilbert–Huang Transform (HHT) [11–13]. This method basically consists of two steps: Empirical mode decomposition (EMD) and Hilbert Transform (HT) [14]. EMD start first and it is in charge for the sifting process. It decomposes the signal into a set of Intrinsic Mode Functions (IMF’s), not assuming linearity, stationarity, or any a priori bases for decomposition. HT is employed then to form instantaneous amplitude and frequency from the corresponding IMFs. HHT spectrum can be finally obtained as a composition of all instantaneous frequencies and amplitudes as a function of time. Nowadays, HHT method has become very popular in various areas including vibrations of rotating machinery [15–17].
This paper considers light rotor–stator rub occurrence and test the capability of HHT method to detect it. Lateral rotor displacements are measured near and at critical speed i.e. without rotor–stator contact and with noticed light partial rub.
It was shown that HHT spectrum can detect partial rotor–stator rub condition but EMD sifting in combination with traditional tools such as FFT and STFT gives certainly extra information to the final decision.
2 Hilbert-Huanng Transform
The HHT is an empirically based adaptive data analysis method that was first proposed by Huang et al. [11] and has been utilized for nonlinear and non-stationary data analysis in various applications. Although is EMD today considered as a first step of HHT, it was original name for the whole procedure. The essence of the method is to identify the intrinsic oscillatory modes by their characteristic time scales in the signal empirically, and then decompose the signal. The method utilizes an iterative sifting process which successively subtracts the local mean from a signal. The sifting process consists of following steps:
-
Determine the local extrema (maxima, minima) of the signal x(t).
-
Connect the maxima with appropriate interpolation function, creating an upper envelope about the signal.
-
Connect the minima with appropriate interpolation function, creating a lower envelope about the signal.
-
Calculate the local mean m 1 as half the difference between the upper and lower envelopes.
-
Subtract the local mean from the signal, h 1 = x(t)−m 1 and inspect whether the number of extrema and the number of zero crossings are equal or differ at most by one. Also, inspect whether all the local maxima are positive and all the local minima are negative.
-
If signal meets definition of IMF (after k iteration), designate it as a c 1 = h 1k
Now, first IMF can be subtracted from original signal
The reminder r 1 should be treated as a new data set/signal and repeat the sifting process to obtain c 2. Described process should be repeated until the original signal is decomposed in terms of IMFs, that is:
where c i (t) is the i-th IMF of the signal x(t) and r n is the final residue. Huang et al. proposed [11] a measure of Standard Deviation (SD) for an iteration stopping criterion:
Having obtained the intrinsic mode function components, it is straightforward task to apply the Hilbert transform to each IMF component, and to obtain the instantaneous frequency.
3 Description of the Test Rig
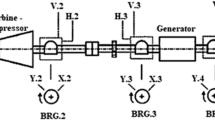
Experimental evaluation of the proposed algorithms for light rubbing detection is performed on a laboratory test rig shown in Fig. 1. The test rig, originally built for rotor—stator contact dynamics investigation, consists of a rotor supported by two self aligning roller bearings and connected via elastic coupling to induction motor with speed controller.

Laboratory test rig
Shaft has total length of 1 m and diameter of 17 mm. Three discs are mounted very closely to each other at the shaft midspan. The biggest disc has diameter of 120 mm and is designed to establish contact with the stator ring while the other two smaller discs of diameter 80 mm are intended for measurements of lateral displacements with non-contacting probes and for phase. The total rotor mass is approximately 5 kg.
The stator is made of annular plate elastically suspended on four circular beams. The radial clearance between rotor and stator is 0.4 mm. According to modal testing first two bending normal modes have frequencies at 27.8 and 145 Hz while first torsional mode have frequency 134 Hz. Stator first lateral (bending concerning the support beams) is 90 Hz.
The measurement system used for this purpose was based on National Instruments PCI card NI 4472 with 3 non-contacting displacement probes IN 085 made by Schenck (2 for rotor radial displacement, one for stator radial displacement in horizontal direction and 1 optical sensors P-84 also made by Schenck for phase measurement.
Measurements were performed at 5 kHz sampling frequency.
4 Analysis of Experimental Results
To test light rub detection capabilities of HHT spectrum, many tests are performed but due to limited space only two of them will be presented. The idea was to compare two similar measurements, first of them without rotor–stator contact (at the speed 25.8 Hz i.e. 1548 rpm) and the other one with noticed partial rotor–stator rub (at the speed 27.6 Hz which is almost at critical speed). During tests rotor had slight unbalance (5e−5 kg m) but also shaft bow equal to 0.11 mm. Measurements are compared via HHT spectra as well as in the shape of FFT spectra and spectrogram of representative IMF component.
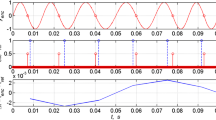
Figures 2, 3, 4 and 5a represents situation without rotor–stator contact. Figure 2 shows IMF component of a rotor lateral signal for a case without contact. First four IMF represent higher frequencies which are out of the scope of this paper. IMF No 5 represents vibration related to the rotor speed and possible contact condition. In Fig. 3 HHT spectra are shown of two lateral rotor displacements in horizontal and vertical directions. Beside expected oscillating instantaneous frequency at about value of rotating speed (25.8 Hz) there are some frequency component greatly oscillating in time from 0.1x up to 0.5x harmonic. According to Muszynska [18] and Peng et al. [19] if partial rotor–stator rub is happening there must exist stable subharmonic vibration with frequencies equal to exact fraction of the rotating speed (most often this fraction is ½) harmonic. Muszynska [18] further explains that during partial rub it should be also observed presence of the higher fraction harmonics e.g. 3/2 and 5/2. FFT of IMF No. 5 for horizontal lateral vibration signal (Fig. 4a) and STFT spectrogram of the same IMF No. 5 component (Fig. 4b) show no noticeable 0.5x harmonic whatsoever. Accordingly it can be concluded that there was no partial rubbing in the first measurement. The orbit shown in Fig. 5a confirms that claim. On contrary orbit in Fig. 5b suggest that some rubbing should happen. During this second test metal punching sound was heard. On HHT spectra shown in Fig. 6 now can be seen more stable 1/2 fraction order vibration. Truly, it is more visible in Fig. 6b for the vertical rotor vibration but still could be observed in Fig. 6a. While in the case without rubbing crucial IMF was No. 5 in the case of second measurement crucial IMF is No. 4. FFT of IMF No. 4 for horizontal lateral vibration signal of the second measurements (Fig. 7a) and STFT spectrogram of the same IMF No. 4 component (Fig. 7b) now clearly shows noticeable 1/2x harmonic as well as 3/2x harmonic. Fractional harmonic 5/2x is somewhat less visible but is also present in spectra. Figure 8 shows corresponding IMF components of the rotor lateral vibration signal for the case of partial rotor–stator rub.

Intrinsic Mode Functions for a case without rotor—stator contact

Hilbert Huang spectra for radial rotor displacements for a case without r/s contact; a horizontal direction—x r b vertical direction—y r

Spectra of a IMF No 5 for a case without r/s contact; a FFT spectrum, b STFT spectrogram

Rotor orbit a case without contact between r/s, b case of light partial rub

Hilbert Huang Spectra for radial rotor displacements for a case of light partial rub; a horizontal direction—x r b vertical direction—y r

Spectra of a IMF No 4 for a case of light partial rub; a FFT spectrum, b STFT spectrogram

IMFs for a case of light partial rub
5 Conclusion
This paper considers possibility of partial rub detection using HHT method. For this purpose two measurements are performed on the specially designed test rig. First measurement presents subcritical rotor operation without rotor–stator contact. Corresponding HHT spectra clearly have 1x harmonic of the rotor speed but on the same time didn’t have stable subharmonic 1/2x vibration. IMF No. 5 of the same measurement showed meaningful frequencies concerning the detection for the rubbing but without observed subharmonics (1/2x) or superharmonics (3/2x and 5/2x). On contrary in HHT spectra of the second measurement (critical rotor operation with established partial rotor–stator rub) it is observed more stable 1/2x fraction order vibration. Corresponding FFT spectra of IMF No. 4 for horizontal lateral vibration signal and STFT spectrogram of the same IMF No. 4 component now clearly shows noticeable 1/2x harmonic as well as 3/2x harmonic. Fractional harmonic 5/2x is somewhat less visible but is also present in spectra.
It can be concluded that HHT spectrum can detect partial rotor–stator rub condition but EMD sifting in combination with traditional tools such as FFT and STFT gives certainly extra information to the final decision.
References
Choy FK, Padovan J (1987) Non-linear transient analysis of rotor-casing rub events. J Sound Vib 113(3):529–545
Bartha AR (2000) Dry friction backward whirl of rotors. Ph.D. thesis, Swiss Federal Institute of Technology, Zurich
Von Groll G, Ewins DJ (2002) A mechanism of low subharmonic responce in rotor/stator contact—measurement and simulation. J Vib Acoust 124:350–358
Torkhany M, May L, Voinis P (2012) Light, medium and heavy partial rubs during speed transients of rotating machines: numerical simulation and experimental observation. Mech Syst Signal Process 29:45–66
Ahrens J, Jiang J, Ulbrich H, Ahaus G (2001) Experimentelle Untersuchungen zum Schaufelanstreifen. In: Schwingungen in rotierenden maschinen—SIRM V Tagung, Wienpp. 97–108 (in German)
Fumagalli M, Varadi P, Schweitzer G (1994) Impact dynamics of high speed rotors in retainer bearings and measurement concepts. In: 4th international symposium on magnetic bearings. ETH Zurich, Switzerland, pp 239–244
Orth M, Nordmann R (2002) ANEAS—a modeling tool for nonlinear analysis of active magnetic bearing systems. In: 2nd IFAC conference on mechatronic systems, Berkley, pp 357–362
Sinha JK (2007) Higher order spectra for crack and misalignment identification in shaft of a rotating machine. Struct Health Monit 6(4):325–334
Braut S (2006) Analysis of the rotor-stator contact dynamics. Ph.D. thesis. University of Rijeka, Faculty of Engineering, Rijeka (in Croatian)
Braut S, Žigulić R, Butković M (2008) Numerical and experimental analysis of a shaft bow influence on a rotor to stator contact dynamics. J Mech Eng 54(10):693–706
Huang NE, Shen Z, Long SR et al (1998) The empirical mode decomposition and the hilbert spectrum for nonlinear and nonstationary time series analysis. In: Proceedings of the royal society of London, vol 454, pp 903–995
Rilling G, Flandrin P, Gonçalves P, Lilly JM (2007) Bivariate empirical mode decomposition. IEEE Signal Process Lett 14(12):936–939
Rilling G, Flandrin P (2008) One or two frequencies? the empirical mode decomposition answers. IEEE Trans Signal Process 56(1):85–95
Feldman M (2011) Hilbert transform in vibration analysis. Mech Syst Signal Process 25(3):735–802
Qi K, He Z, Zi Y (2007) Cosine window-based boundary processing method for EMD and its application in rubbing fault diagnosis. Mech Syst Signal Process 21:2750–2760
Du Q, Yang S (2007) Application of the EMD method in the vibration analysis of ball bearings. Mech Syst Signal Process 21:2634–2644
Ricci R, Pennacchi P (2011) Diagnostics of gear faults based on EMD and automatic selection of intrinsic mode functions. Mech Syst Signal Process 25(3):821–838
Muszynska A (2005) Rotordynamics. CRC Press, Boca Raton
Peng ZK, Tse PW, Chu FL (2005) An improved Hilbert–Huang transform and its application in vibration signal analysis. J Sound Vib, 286:187–205
Acknowledgments
This study was supported by University of Rijeka (Grants No. 13.09.1.2.11 and No. 13.09.2.2.19.).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Braut, S., Žigulić, R., Štimac, G., Skoblar, A. (2015). Rotor-Stator Partial Rub Diagnosis Using Hilbert Huang Transform. In: Pennacchi, P. (eds) Proceedings of the 9th IFToMM International Conference on Rotor Dynamics. Mechanisms and Machine Science, vol 21. Springer, Cham. https://doi.org/10.1007/978-3-319-06590-8_161
Download citation
DOI: https://doi.org/10.1007/978-3-319-06590-8_161
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-06589-2
Online ISBN: 978-3-319-06590-8
eBook Packages: EngineeringEngineering (R0)