
Abstract
This paper aims to study the influence of varying number of balls on nonlinear dynamic behavior of an unbalanced rotor supported by ball bearings. Centrifugal force due to rotation of balls is included in the model. An oscillating spring-mass-damper is considered to formulate the contact between races and rolling elements. Stiffness for the spring-mass-damper system is calculated using Hertzian elastic contact deformation theory. The results show appearance of regions of periodic, sub-harmonic and chaotic behavior on response of the system. Invariably, the route to chaos is seen to be intermittency mechanism by period doubling behavior. Poincare maps and frequency responses are used to explain and to study the system behavior.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Rolling element bearing is one of the essential components in rotating equipments. In present scenario, bearing applications require understanding of nonlinear dynamic effects. Nonlinearity often arises due to Hertzian force deformation relationship, the varying compliance nature, the internal clearance, varying number of balls etc. The behavior of nonlinear system often demonstrates unexpected behavior patterns that are extremely sensitive to initial conditions. The excitation due to unbalance force in rotor bearing system cannot be eliminated completely [1, 2] even with good balancing of rotor and therefore it is the major parameter to consider for study. Due to consideration of unbalance force the system is bi-periodically excited. The amount of unbalanced force changes continuously with operating parameters and thus changing the dynamic behavior of the whole system. Moreover, when ball bearing operates at high speed the effect of centrifugal force cannot be neglected. Jang and Jeong [3] considered the effect of centrifugal force of ball with waviness on races for balanced rotor. However effect of centrifugal force of ball along with unbalanced rotor and nonlinear spring-damping model has not been considered so far.
The aim of present study is to analyze the nonlinear dynamic response of unbalanced rotor supported on ball bearings considering centrifugal force. Sources of nonlinearity such as Hertzian contact force, varying compliance frequency are considered and formulate in Mathematical model. Effect of number of balls is considered at constant rotational speed.
2 Mathematical Modeling
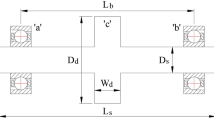
A rolling element bearing supporting horizontal rotor considering unbalance force is shown in Fig. 1. To analyze nonlinear dynamic response of ball bearing the bearing components are modeled as non-linear spring-mass-damper system, in which the outer race of the bearing is fixed rigidly and inner race, is fixed rigidly with shaft. A constant radial force is assumed to be acting on the system.

Rolling element bearing model considering Mass-spring-damper
It is assumed that the spring damper model considered here has equally spaced balls rotating on the surfaces of the inner and outer races. When the rolling element set and the cage rotates with a constant angular velocity (ωcage), a parametrically excited vibration is generated and transmitted through the outer race.
The characteristic frequency of this vibration is called the varying compliance frequency (VC) and is given by
where N b is number of balls.
For the ith ball, local Hertzian contact force and deflection are related as [4]
where, k is the nonlinear stiffness due to point contact, \( \theta_{i} \) is the angular position ith ball and \( r_{{\theta_{i} }} \) is radial displacement of the ith ball which is given by [5]
Considering the internal radial clearance, \( \gamma_{0} \), the contact deformation becomes,
Substituting \( r_{{\theta_{i} }} \) in the Eq. (3), we get
where, \( H\left\{ {\left( {x\cos \theta_{i} + y\sin \theta_{i} } \right) - \left( {\gamma_{0} } \right)} \right\}^{{{\raise0.7ex\hbox{$3$} \!\mathord{\left/ {\vphantom {3 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}}} \) is a Heaviside step function.
Total restoring force in x and y direction considering Hetzian contact force \( \left( {P_{{\theta_{i} }} } \right) \) and centrifugal force \( \left( {P_{c} } \right) \) is written as
The centrifugal force is given by [6]
where, \( D_{b} \) is ball diameter, \( \omega_{cage} \) is angular velocity of the cage and \( D_{m} \) is pitch circle diameter of the bearing.
2.1 Nonlinear Damping Force
A viscous damping model is considered in present formulation in which the dissipative forces are proportional to the time derivate. The resulting equation [7] is given by
where, \( c(r_{{\theta_{i} }} ) \) depends on contact geometry, material properties of elastic bodies, lubricant property and contact surface velocities.
2.2 Equation of Motion
The equation considering effect of inertia, restoring and damping force and constant vertical force acting on the inner race are represented as [5]
where, \( M_{R} \) is the rotor mass supported on bearings, \( P_{r} \) is the radial load on bearing and \( P_{u} \) is force due to unbalance.
The system is defined by Eqs. (11) and (12) which are two coupled non-linear second order differential equations.
3 Results and Discussion
In present study, ball bearing 6205 is considered whose parameters are shown in Table 1. Shaft is assumed to be running at 5000 rpm and an unbalance force of 10 % of radial load is considered in the current study. The Runge-Kutta methods of fourth order are used to solve coupled equations. The time step for the investigation is taken as ∆t = 10−5 s with the initial displacements as x 0 = 10−6 m, y 0 = 10−6 m and initial velocities are assumed to be zero i.e. \( \dot{x}_{0} =0\,{\text{m/s}},\dot{y}_{0} = 0\;{\text{m/s}} \). Poincaré maps and frequency responses are used to illustrate and study the effect of system diversity.
For number of balls N b = 6, peak amplitude of vibration for X direction response appears at rotational speed (X = 83 Hz) as shown in Fig. 2a. Other major peaks appears at the interaction of varying compliance frequency and rotational speed (X = 83.33 Hz) and their harmonics at VC − X(=116 Hz), 2X, VC + X(= 282 Hz).Fractal structure is observed through Poincaré map which reveals chaotic nature. For Y Direction response, peak amplitude appears at rotational speed (X = 83.33 Hz) and other peak appears at VC − X(=116 Hz), VC(= 199 Hz) shown in Fig. 2b. The Poincaré map shows fractal structure for N b = 6 as shown Fig. 2b.

FFT and poincare map at N b = 6 a X direction b Y direction
Figures 3, 4 and 5 shows quasi periodic response from Poincaré map for N b = 7, 8 and 9 respectively. Major peak is obtained corresponding to shaft rotational frequency (X = 83 Hz) and amplitude decreases as number of balls increases. This is due to increase in stiffness of the system since number of balls coming in load zone increases. System further stabilizes when number of balls is changed to 10, which is shown in Fig. 6. At this moment, systems exhibits multi orbit periodic response which is clearly indicated in Poincaré map. The results are summarized in Table 2.

FFT and poincare map at Nb = 7 a X direction b Y direction

FFT and poincare map at N b = 8 a X direction b Y direction

FFT and poincare map at N b = 9 a X direction b Y direction

FFT and poincare map at N b = 10 a X direction b Y direction
4 Concluding Remarks
This study presents an analytical model to investigate the effects of unbalance and centrifugal force acting on ball bearing model. Unbalance force corresponding to 10 % magnitude of radial load \( \left( {P_{r} } \right) \) with internal clearance of 10 µm are considered in the present study. Number of balls are varied and effect of variation has been analyzed at constant rotational speed of shaft. Following conclusions can be drawn from present study.
-
Nonlinear dynamic responses are found to be associated with rotational frequency (X) and its super harmonics due to unbalance force.
-
Results show interaction of rotational frequency (X) due to unbalance force and varying compliance frequency (VC) due to parametric excitation.
-
When number of balls are increased peak amplitude decreases implying a stiffer system and same was reported by Harsha et al. [4] and Kankar et al. [8]. It can be predicted from the results that increasing number of balls reduces the effect of frequency modulation.
-
For N b = 5–6, chaotic nature is observed from poincare map. When number of balls increases to N b = 7–9, quasi-periodic behavior is observed and further increase in the number of balls results in entering of system in stable zone. This can be attributed to increase in stiffness due to increase in number of balls.
-
From this analysis an insight is obtained to choose appropriate number of balls so that system can be operated in stable zone and severe amplitude of vibration (chaotic) can be avoided.
References
Tiwari M, Gupta K, Prakash O (2000) Dynamic response of an unbalanced rotor supported on ball bearings. J Sound Vib 238(5):757–779
Vakharia V, Kankar PK, Gupta VK (2012) Nonlinear dynamic analysis of balanced and unbalanced rotor supported by ball bearing. In: Proceedings of the international conference on innovations in design and manufacturing, 5–7 Dec 2012
Jang GH, Jeong SW (2003) Analysis of a ball bearing with waviness considering the centrifugal force and gyroscopic moment of the ball. J Tribol 125:487–498
Harsha SP, Kankar PK (2004) Stability analysis of rotor bearing system due to surface waviness and number of balls. Int J Mech Sci 46:1057–1081
Harsha SP, Sandeep K, Prakash R (2003) The effect of speed of balanced rotor on nonlinear vibrations associated with ball bearings. Int J Mech Sci 45:725–740
Harris TA (2001) Rolling bearing analysis. Wiley, New York
Upadhyay SH, Jain SC, Harsha SP (2011) Vibration analysis of high speed rolling element bearings due to race defects. In: IUTAM symposium on emerging trends in rotor dynamics, vol 1011, pp 349–359
Kankar PK (2011) Fault diagnosis of rolling element bearings using vibration signature analysis. Ph.D. thesis, IIT, Roorkee
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Vakharia, V., Gupta, V.K., Kankar, P.K. (2015). Nonlinear Dynamic Analysis of Ball Bearings Due to Varying Number of Balls and Centrifugal Force. In: Pennacchi, P. (eds) Proceedings of the 9th IFToMM International Conference on Rotor Dynamics. Mechanisms and Machine Science, vol 21. Springer, Cham. https://doi.org/10.1007/978-3-319-06590-8_151
Download citation
DOI: https://doi.org/10.1007/978-3-319-06590-8_151
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-06589-2
Online ISBN: 978-3-319-06590-8
eBook Packages: EngineeringEngineering (R0)