
Abstract
With the new Signature Engineering Building at Virginia Tech over 250 accelerometers and other sensors (temperature, wind, etc.) are being installed to capture building data in real-time. This program allows the study of myriad topics associated with building design and operation from infancy through the useful life of the structure. Topics include structural health monitoring, building occupancy patterns for improving sustainable development, and studies on floor vibrations and human motion, among many other topics. This paper presents initial information on corridor instrumentation, including pilot data taken from four accelerometers mounted in the fourth floor corridor. Accelerometer data was collected for the case from someone walking and then running down the corridor. Initial observations are presented from the pilot data to demonstrate the type and form of data that can be obtained from this setup. The results from this study demonstrate consistency with foot impact trends seen in literature, and confirm the feasibility of the system to be used in future studies.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
19.1 Introduction
19.1.1 VT SEB Instrumentation Platform
A new 160,000 ft2 engineering building, The Signature Engineering Building (SEB) shown in Fig. 19.1, is currently under construction on the Virginia Tech campus with occupancy planned for summer of 2014. The authors, as part of the VT Smart Infrastructure Lab, with support of the VT College of Engineering, are outfitting the building with over 250 accelerometers and other sensors (temperature, wind, etc.) to study the dynamics of the building in real-time. Primarily designed for structural health monitoring (SHM), dynamic model verification, and instrumentation studies, this instrumentation project has identified and instrumented key structural locations and areas of unique interest throughout the building. These unique areas include corridors on the fourth floor, and office spaces on the second floor. These areas provide a test bed for human motion identification and tracking in a variety of building environments. Occupancy and tracking research has implications for improving emergency evacuation and security as well as for general smart building development.

Artist rendering of the Virginia Tech Signature Engineering Building, and progress of construction at the time of writing
19.1.2 Human Motion Identification
Identifying and localizing human motion is of keen interest in building and perimeter security [1], emergency evacuation [2], and improving building resource management and efficiency [3]. Seismic footstep detection is one method of identifying human motion, where the characteristics have been discussed extensively in literature, as Sabatier et~al. [4], have reviewed.
The majority of footstep seismic energy is found in the frequency range up to 24 Hz [5]. This frequency band of footstep seismic energy, less than 100 Hz, has been shown to be a result of the normal force from the foot striking the ground [6]. Higher frequencies above 500 Hz are generated by the tangential force from foot motion [7]. However, while the transfer function between a seismic source and sensor is site specific, the ground naturally acts as a band-pass filter in the 20–90 Hz frequency band [8]. Therefore the majority of seismic studies of footsteps focus on the frequency range up to 100 Hz, which is often easier to detect at greater distances from the source [9].
Pakhomov reported how the frequency range containing the main part of footstep signal energy begins to shift as a result of distance from the sensor. Beyond 6 m the frequency range below 100 Hz contains the majority of seismic energy. With lower frequencies, specifically those between 10 and 16 Hz, playing a significant role at distances at 60 m and beyond [9].
Seismic sensors have successfully been used to distinguish between biped and quadruped gaits, specifically by cadence analysis of temporal gait pattern [10]. However, there are limitations to using seismic sensors, such as detection being limited by impact magnitude and background noise floor [11]. Therefore it is often the case where redundant sensor arrays that incorporate multiple types of sensors are deployed in real world applications [12].
The Signature Engineering Building instrumentation project aims to create a real-world lab that provides a foundation for future research into a diverse field of topics including structural health monitoring, building dynamics, digital signal processing, sensor network design, and a variety of other more non-conventional areas including human motion identification and smart building infrastructure studies.
In this paper a pilot study was performed using accelerometers in the fourth floor corridor of the SEB. Data was captured of both walking and running motion from a single person in the corridor, and is presented in multiple formats in order to demonstrate the possibilities for analysis and identification purposes.
19.2 Experimental Setup
Tests were performed along a corridor on the fourth floor of the Virginia Tech Signature Engineering Building (SEB), which is currently in the final stages of construction, and shown in Fig. 19.2a. This particular corridor has mounts installed along the support girders underneath the floor, as seen in schematic in Fig. 19.2b.

(a) Fourth floor corridor in VT SEB. (b) Accelerometer mount attached to underside of floor girders
These mounts were designed to accommodate accelerometers for structural health monitoring by providing a solid interface for measurements while giving clearance from the fire retardant foam covering the girders. The mounts, shown in Fig. 19.3a, were constructed out of steel and measured 1.5 in. × 1.5 in. × 3.75 in. Modal analysis was performed on a mount prototype to confirm resonant frequencies. The first resonant frequency was above 3,200 Hz and therefore would not interfere with measurements. The mount was welded directly to the steel support structure of the building. This required the fire retardant foam to be removed, as shown in Fig. 19.3b, but later was patched over to restore integrity to the fireproofing. The design of the mount allows it to be used for single axis or tri axis measurements, as shown in Fig. 19.3b, c respectively.

(a) Accelerometer mount prototype. (b) Mount welded to girder with single axis accelerometer. (c) Mount with three single axis accelerometer attached for tri-axial measurement
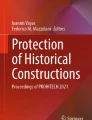
Four locations along the corridor, illustrated in Fig. 19.4, were chosen to capture human motion induced vibration. Both a walking and running pace were recorded for analysis. Movement began 10 ft before the first sensor, and concluded 10 ft after the final sensor. Sensors 1 and 4 are located in the center of the pathway, and the two sensors in the middle, numbers 2 and 3, were each spaced 2.5 ft off-center from the pathway. All four accelerometers are mounted on the underside of the floor support girders, as described previously.

Movement path and accelerometer placement
Measurements were made using a National Instruments NI-9233 24-bit input module. The NI-9233 performs pre-process anti-aliasing low-pass filtering and simultaneous sampling of four channels. All measurements were sampled at 2,000 Hz.
PCB Piezotronics 393B04 single-axis accelerometers were attached to the floor mounts using 10–32 stud connectors. The 393B04 has a resonant frequency of 2,500 Hz, a nominal sensitivity of 1 V/g, and broadband resolution of 0.000003 g rms. The accelerometer was used to capture acceleration normal to the floor surface up to 1,000 Hz.
19.3 Experimental Results and Data Processing
Since the experiments were performed on an active construction site a large amount of background noise was present in the measurements. Despite this noise the footsteps of both walking and running motion were identifiable, as shown in Table 19.1.
Further post-processing, such as bandwidth filtering, could be used to clean and smooth the signal further, as shown in previous work by Zubair [13], but none was used for this pilot work. In this section, walking and running data is presented in both the time domain and the frequency domain, and observations are presented.
19.3.1 Time Domain Analysis
Walking motion captured by the accelerometer at sensor location 3 is presented in Fig. 19.5. This sensor was located 2.5 ft from the center of the pathway, 31 ft after the starting location, and 31 ft before the ending location. This centralized location was valuable for analyzing characteristics of human footsteps passing by the sensor.

Human walking motion captured by accelerometer at location 2
The largest magnitude impact occurred at 9.55 s, and this would be closest to the accelerometer. Since the first footstep occurred at 0.13 s and motion was in a linear and steady pace then it follows that the subject took 9.42 s to travel approximately 31 ft, or an average speed of 3.3 ft/s. Also, 18 individual impacts occurred, giving an approximate 1.72 ft between footsteps.
The accelerometer data for all four sensors, shown in Fig. 19.6, captures a person walking down the corridor. As the person passes over the first accelerometer the magnitude of the impacts increase, and then fade as the distance increases. The impacts at accelerometers 2 and 3, both located 21 ft from the first accelerometer and 2.5 ft from the center of the pathway, repeats this pattern of increasing then decreasing magnitude as the subject walks by. Finally, the final footsteps are recorded as the person walks 10 ft beyond accelerometer 4 and halts movement. The averaged max magnitude from all four accelerometers was 2.8e−3 ± 5.1e−4 g, with the largest magnitude of 3.5e−3 g seen by accelerometer 4.

Accelerometer data from walking motion
To illustrate the difference between walking and running motion a comparison is presented in Fig. 19.7. This data was captured at location 3. In this figure the same scale is used for both acceleration axes in order to illustrate the difference in magnitude between walking and running foot impacts. On the time axis the same scale is used, but different time periods are shown due to the overall completion time differing between walking and running. The running motion can be identified not only by the magnitude of impacts, but also by pace between steps. For walking motion there was 0.52 ± 0.06 s average between footsteps, whereas for running motion there was only 0.38 ± 0.01 s.

Comparison between walking and running motion accelerometer data
The time domain data of running motion through the corridor captured by all four accelerometers is presented in Fig. 19.8, and it repeats the same pattern as found in the walking analysis. Other than the increase in impact magnitude and increased pace the runner also completes the course in 10.4 s, giving an overall velocity of 5.96 ft/s.

Accelerometer data from running motion
19.3.2 Frequency Domain Analysis
Spectrograms were chosen to represent the frequency domain data for their ability to visualize magnitude of frequency components as a product of time. In order to generate these spectrograms the data was processed using discrete Fourier transforms of size 500, which is equal to 0.25 s or approximately one footstep, and applying Hamming windows with 90 % overlap.
The walking motion spectrogram from the accelerometer data at location 3 is compared to the time domain data in Fig. 19.9. In this image it can be seen that while the individual foot impacts are difficult to visually discern in the time domain, with the peaks in the middle being the easiest to identify, 32 individual impacts are seen in the frequency range less than 100 Hz. The furthest footsteps are approximately 30 ft from the sensor. As footsteps fall closer to the accelerometer higher frequencies, 100–300 Hz, become identifiable in the signal. These higher frequencies are attenuated as distance between impacts and sensor increases.

Comparison between time domain and spectrogram data from location 3
The spectrogram of running motion is compared with walking motion in Fig. 19.10. With running motion there was an increase not only in the frequency range below 100 Hz, but also from 100 to 500 Hz at impact points near the sensor. Again this higher frequency signal is attenuated as the distance from the sensor increases, but the impact frequencies below 100 Hz still allow identification of the footsteps.

Comparison between spectrograms of walking and running motion
19.4 Conclusions
Four accelerometers were mounted to floor girders in a corridor of the Virginia Tech Signature Engineering Building, and then both walking and running motion was captured along this pathway. The signal was pre-processed with anti-aliasing low-pass filtering, but no additional filtering was performed post-process. Despite high levels of background noise both running and walking motion was identifiable in the time domain and frequency domains. The same trends of frequency content seen in literature [5, 9] were also seen in this study despite conditions not being part of a controlled laboratory environment. As footsteps fell closer to the accelerometers the frequency band increased to include frequencies up to 500 Hz, and at further distances the frequencies below 100 Hz contained the majority of seismic footstep energy. This data shows that accelerometers placed on the underside of floor girders can be used to identify human motion in both the time and frequency domains, and also verifies the feasibility of using the system being installed in the SEB for future studies on human motion localization and tracking.
References
Subramanian A, Iyengar SG, Mehrotra KG, Mohan CK, Varshney PK, Damarla T (2009) A data-driven personnel detection scheme for indoor surveillance using seismic sensors. In: Unattended ground, sea, and air sensor technologies and applications XI, pp 733315–733315-11
Sharma S, Gifford S (2005) Using RFID to evaluate evacuation behavior models. In: Annual meeting of the North American fuzzy information processing society, IEEE, 26–28 June 2005, pp 804–808
Agarwal Y, Balaji B, Gupta R, Lyles J, Wei M, Weng T (2010) Occupancy-driven energy management for smart building automation. In: Proceedings of the 2nd ACM workshop on embedded sensing systems for energy-efficiency in building. ACM, New York, pp 1–6
Sabatier JM, Ekimov AE (2008) A review of human signatures in urban environments using seismic and acoustic methods. In: 2008 IEEE conference on technologies for homeland security, Waltham, pp 215–220
Pakhomov A, Sicignano A, Sandy M, Goldburt T (2004) Current seismic sensor issues for defense and security applications. In: Sensors, and command, control, communications, and intelligence (C3I) technologies for homeland security and homeland defense III, pp 576–581
Galbraith FW, Bartion MV (1970) Ground loading from footsteps. J Acoust Soc Am 48:1288–1292
Ekimov A, Sabatier JM (2013) Vibration and sound signatures of human footsteps in buildings. J Acoust Soc Am 120:762–768
Cress DH (1978) Terrain considerations and data base development for the design and testing of devices to detect intruder-induced ground motion. U.S. Waterways Experimental Station, U.S. Army Engineer Waterways Experiment Station, Vicksburg
Pakhomov A, Sicignano A, Sandy M, Goldburt T, Systems GS, Mill S et al (2003) Seismic footstep signal characterization. In: Sensors, and command, control, communications, and intelligence (C3I) technologies for homeland defense and law enforcement II, pp 297–305
Park HO, Dibazar AA, Berger TW (2009) Cadence analysis of temporal gait patterns for seismic discrimination between human and quadruped footsteps. In: 2009 IEEE international conference on acoustics, speech and signal processing, Taipei, pp 1749–1752
Sabatier JM, Ekimov AE (2008) Range limitation for seismic footstep detection. In: SPIE defense and security symposium, pp~69630V–69630V-12
Dibazar AA, Yousefi A, Park HO, Lu B, George S, Berger TW (2011) Intelligent recognition of acoustic and vibration threats for security breach detection, close proximity danger identification, and perimeter protection. In: Homeland Security Affairs, Supplement 3, March 2011. www.hsaj.org
Zubair M, Hartmann K (2010) A comparative study of human motion using ultrasonic and seismic sensors. In: 2010 IEEE international ultrasonics symposium, pp 137–140
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 The Society for Experimental Mechanics, Inc.
About this paper
Cite this paper
Hamilton, J.M., Joyce, B.S., Kasarda, M.E., Tarazaga, P.A. (2014). Characterization of Human Motion Through Floor Vibration. In: Catbas, F. (eds) Dynamics of Civil Structures, Volume 4. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-319-04546-7_19
Download citation
DOI: https://doi.org/10.1007/978-3-319-04546-7_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-04545-0
Online ISBN: 978-3-319-04546-7
eBook Packages: EngineeringEngineering (R0)