
Abstract
Marine operations are becoming more and more demanding. Efficient modeling and analysis of marine operations under environmental effects, especially in high sea states, will provide a means to improve operational safety. Traditional modeling and analysis are often carried out based on establishing the combined equations of the multi-body system. However, modeling, simulation and analysis of sub-systems may be performed in different software tools or require extensive derivation. It is inconvenient to vary the system configuration regardless of manufacturing design or behavior analysis perspectives. Co-simulation as an emerging technology enables the reusing and sharing of models so that different sub-systems can be modeled independently but simulated together. In this study, a system based on a co-simulation platform - Vico is proposed, which enables the digitalization of marine operations from modeling, configuration to simulation. The system consists of multiple sub-models of the ship, the marine crane and their coupling component, which are all converted and exported as functional mock-up units (FMUs). Various scenario settings such as environmental effect, ship maneuver and crane payload can be configured for the simulation of specific marine operations. Taking the research vessel Gunnerus as the testbed, two case studies about the impacts from the environment and a shipboard crane on marine operations are conducted. The simulation results verify the effectiveness of the marine operation system. The system could also be a foundation for further research on onboard support of marine operations.
The author would like to thank China Scholarship Council for funding his research at Norwegian University of Science and Technology.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Marine cranes are indispensable for the modern maritime industry. They are configured on a wide range of vessels and platforms, which conduct a variety of operational tasks such as lifting, towing, and transferring loads between shores and decks. Generally, marine crane systems are large and work in a more unstable environment than land-based cranes. In spite of the positive effect from the dynamic positioning system (DP) on the ship's behaviors, the marine crane operation is still a challenging task involving load sway, positioning accuracy, suppression, collision avoidance, maneuvering safety and many other issues due to the tight coupling between the vessel and the crane on board, with the non-negligible impact of waves, currents and wind as external disturbances. These complex operating conditions make it harder to guarantee safety and achieve efficiency at the same time which is a core demand for maximizing the benefits. Therefore, it is becoming increasingly important and necessary for the maritime industry to work on how to increase the safety of marine crane operations.
Over recent years, there has been a growing interest in developing and employing digital twins, big data and cloud computing for maritime industry systems design, ship intelligence and operational services. Digitization has stepped up as a critical aspect into enabling the maritime industry to be more innovative, efficient and future-proof in operating [1]. Growing access to advanced technologies for designing and evaluating system performance, safety, and structural integrity is generating a range of digital models of both vessels and their sub-systems. NTNU Aalesund has been conducting digital twins of maritime systems and operations research for years [2]. For example, digital twins for vessel life cycle service were developed as an open virtual simulator of next-generation marine industrial infrastructure for overall system design, system configuration and operational performance verification, while enabling full life-cycle service support and system behavior prediction [3]. Such digitalized and intelligent systems are now also being increasingly focused on and realized by many maritime equipment suppliers, companies as well as research institutes such as Palfinger and SINTEF.
The digitalization for marine cranes has also largely advanced the support of its offshore operations, whether it involves stages of design, testing and analysis for optimization, as well as control-related areas [4]. The last few decades have seen more and more modeling and simulation approaches being studied. However, the marine crane system is an interdisciplinary integral involving such as mechanical, hydraulic and dynamic fields. It is challenging to develop models of complex multi-domain systems and to handle the simulations of dynamic models. Generally speaking, it is difficult to describe a complex system model with a single tool or in an individual environment. Co-simulation enables us to assemble and integrate different components by defining their interfaces and communication ways. As a result, different sub-systems can be modeled by different tools, especially for those that require specialized tools provided by the manufacturer to achieve. In this manner, a large complex system can be disassembled.
The development of model exchange and co-simulation provides the feasibility of developing tool-independent interface standards for complex information-physical systems. In such a co-simulation environment, the digital crane can be built as virtual prototyping by different units such as the dynamics unit and the kinematics unit, which can provide a platform for system analysis, crane operation evaluation and some other related research or testing [5].
In this paper, a co-simulation-based system is presented for simulation, testing, analysis of ship-crane operations and other advanced support. The vessel and crane Functional Mock-up Units (FMU) are exported using the standard Functional Mock-up Interface (FMI) and constructed under the co-simulation platform VICO. Some system structure and parameterization details towards realizing the construction of the vessel and the crane are implemented. The ship R/V Gunnerus is employed as the testbed to verify the effectiveness of the presented system, based on which case studies are given discussion with result analysis.
The contributions of the present study are summarized as follows:
-
The components of the crane are developed and the communications among the sub-models are built.
-
The marine operation system is constructed by integrating the ship and the crane components as well as the motion and force transfer.
-
Two case studies are implemented based on the marine operation system to simulate the environmental configuration and crane operations. The results verify the effectiveness of the marine operation system.
The rest of the paper is organized as follows. Section 2 introduces some related work from the viewpoint of modeling and co-simulation. An implementation description of the co-simulation-based system is given in Sect. 3. In Sect. 4, case studies are implemented with results discussed using the testbed Gunnerus which is operated by the Norwegian University of Science and Technology (NTNU) and serves as the test ship. Finally, conclusions and some future works are drawn in Sect. 5.
2 Related Work
2.1 Modeling
The modeling of cranes is challenging due to the excessive number of degrees of freedom in the system and the underactuated characteristic of the crane control [6]. Establishing an accurate dynamics model is the basis for studying system characteristics, designing control strategies, new components testing and even operator training purposes. There are many methods used to derive dynamic equations for mechanical systems, all of which result in equivalent sets of equations. As one of the more classic methods, Newton-Euler method is based on the interpretation of Newton's Second Law of Motion describing dynamic systems in terms of force and momentum. But the recursion of Newton-Euler method requires much formula derivation and calculation [7]. Different from Newton-Euler method, Lagrange method computes the motion equations from the viewpoint of energy, which can avoid derivative causality problems. In recent years, many researchers have employed Lagrange equations to implement dynamics modeling of cranes [8, 9], since it can provide an elegant clean form that supports better for the following system control.
The modeling of offshore operating systems is not limited to the mechanical dynamics of the crane, but also includes many other fields, such as the hydraulic system of the crane [10], the hydraulic system of the winch [11] and the hydrodynamics between the vessel and the waves [12], etc. There are also many different software tools to support the modeling of different systems. Software such as MATLAB/Simulink, SimulationX and 20-sim enable modeling and simulation to be carried out in a homogeneous environment [4, 13], which encourages the development of the toolboxes and packages. However, for modeling and simulation of complex multi-disciplinary systems like marine cranes, a homogeneous environment is no longer sufficient in some cases. At this level, one other trend comes up, that is, to distribute the modeling of subsystems after decomposing a complex system into several subsystems, which enables different systems modeling to be implemented in their corresponding specialized software tools or provided by the manufacturers. Nonetheless, there are still challenges regarding the interaction between different sub-models and the communication between different simulation tools.
2.2 Co-simulation
The development of modern engineering has led to the emergence of numerous complex systems, which are composed of physical, electronic, mechanical, software, network and other multi-disciplinary construction, which is why currently many systems must be built and optimized to be multi-threaded. In most cases, participants or suppliers develop the tools in their fields, which is a partial solution, not a holistic one, from which the idea of the co-simulation technology comes. There used to be no single simulation tool that is applicable for all purposes, and complex heterogeneous models with components from a couple of diverse fields may need to be developed in separate, domain-specific tools. A co-simulation enables model reusing, sharing and also the fusion of simulation domains compared to traditional monolithic simulations.
There are two standards for co-simulation, referred to as the High Level Architecture (HLA) [14] and the Functional Mock-up Interface (FMI) [15]. They are separately used for discrete event co-simulation and continuous time co-simulation. According to the survey from Schweiger [16], the FMI standard is considered the most promising standard for continuous time, discrete event and hybrid co-simulation. Based on the FMI standard, some open-source co-simulation frameworks have been developed with supporting the System Structure and Parameterization (SSP) [17] standard which is a tool-independent standard describing a complete system consisting of one or more components (e.g. FMUs), including their parameterization. For example, Libcosim is a cross-platform C/C++ library that supports co-simulation design and execution. It is developed based on the Open Simulation Platform (OSP) [18], which builds an ecosystem that enables the maritime industry can perform co-simulations and share simulation models with high efficiency and safety.
In recent years, FMI-based co-simulation has been applied to various research in the maritime domain. Hassani et al. [19] present four relevant cases of applications to demonstrate the use of co-simulation technology in the maritime industry in their paper. All the case studies are simulated using the Functional Mock-up Interface (FMI) standard based on the framework of Coral which is an open-source co-simulation software developed in the project. Chu et al. [20] present an object-oriented modeling (OOM) approach to model marine operation systems. A virtual prototyping (VP) framework is developed with the functional mock-up interface (FMI) standard. Based on the VP framework, an active heave compensated winch with a hybrid drive system and secondary control strategy are proposed where the simulation configuration and the customer interface are achieved by web technology through the WebSocket protocol.
The application of co-simulation makes it innovative progress in many research fields. The development makes it possible to carry out the study of coupling issues by disassembling complex systems into subsystems avoiding numerous calculations. However, almost all of the co-simulations are being carried out at the cost of losing much accuracy, especially in the cases where algorithms need to be incorporated to optimize the simulation efficiency. This is one of the currently foreseeable challenges in co-simulation. It is also important that benchmarks for model simplification and simulation performance should be established according to different simulation objectives since the simulation accuracy and stability are critical for FMI-based co-simulation.
3 Marine Operation System
3.1 System Structure

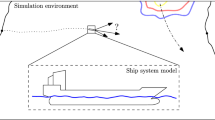
The co-simulation-based system developed for marine operations
The present system in Fig. 1 is based on the co-simulation platform Vico. Vico is an advanced co-simulation framework that is developed based on the Entity-Component-System software architecture [3]. As one of the co-simulation platforms, Vico not only supports the FMI standard but also supports the SSP standard, which makes it possible that any type of vessel and crane even other onboard machinery can be simulated based on the system as long as the components can be modeled with defining the communication interfaces.
The most notable advantage of the present system is that in such a way all the FMUs exported by the FMI standard can be configured as desired using the SSP standard. For example, in the thruster model, the type, material and size of the thrusters can be modified; similarly, in the crane model, the position of the crane on the deck, the postures of the crane arms, the parameters of the cable and the payload can also be modified. This will be particularly beneficial for manufacturers to perform crane design, as well as test the performance of the system with various configurations. Since the system model is modularized by means of the co-simulation standard, the integrated model is more like a black box for the co-simulation platform and its inside construction or programming will not be exposed, which can protect the intellectual property of its owner.
One of the important factors affecting the safety of marine cranes is the sea state conditions during offshore operations. Regarding this issue, the system is also able to configure the environment setting where wind, waves, and currents can be manipulated to simulate the real sea state according to the offshore conditions, such as the velocity and the direction of the wind, the spectrum and the time of the wave, etc. What is more, it even provides the possibility, that is, to use the collected real sea state data as one of the inputs to the system, which makes the simulation with more fidelity different from the modeling of waves. In addition, diverse virtual scenarios can be generated to simulate the onboard operation of the crane, which makes it possible to analyze the behavior and interaction between the crane and the vessel. With further support, the system can contribute to advanced applications in various aspects like risk modeling, system automation and control.
3.2 Key Components
The present system in this research is conducted for performing the co-simulation of the marine crane offshore operations. Therefore, the following part introduces the key components including ship maneuvering, crane operation as well as motion and force transfer.
Ship Maneuvering.
The engaged ship components for the maneuvering simulation are several detailed sub-models, such as the dynamic positioning controller, the thrusters, etc. As shown in Fig. 2, each block represents a single independent FMU, and the connections for the ship maneuvering are presented. There are too many interfaces inside the components, the details are not presented here.
In particular, the vessel is modeled in six degrees of freedom (6-DoF) with waves, implemented according to the unified non-linear model subjected to waves, wind and currents from Fossen [21]. The VesselModel was developed by SINTEF Ocean in the SimVal project [22]. It is mainly to solve the equations of motion containing the vessel’s restoring force, mass, resistance and some other hydrodynamics information. The Observer is to compute the movement direction and the speed to get the position difference with time, and also it can filter short frequency waves for the DP system. The DPController can make sure the ship can stop at a relatively ideal fixed location in the world frame. The Allocator will get the direction and speed information from the Observer, and then allocate the forces to the thrusters. There are three thrusters with their own actuators, separately a port-side azimuth thruster, a starboard-side azimuth thruster, and a tunnel thruster, where a 3DOF force can be produced in heave, surge and sway directions. In the PowerPlant, a marine power plant system is provided with two equally large gensets.

Relationship of sub-model components for ship maneuvering
Crane Operation.
There are two strategies for crane operation: the active manipulation of the crane to control the tip and the feedback control with the compensation controller. Inside the model of the crane, there are defined input interfaces of all the joints for all kinds of operations depending on the type of the crane. For example, the users can set three interfaces for the mechanism with 3 DOF like RRP or RPR serial chain, or more interfaces for structures with more DOFs. The other strategy is to operate the crane with the controller with algorithms as the users desired. Normally heave compensation controllers and tip compensation controllers are applied in most of the research.
Figure 3 presents the components connection of a specific example for crane operations. In the Crane, the defined input interface contains four typical degrees of freedom of a Palfinger crane, where craneSetPoint1 [1] is the interface for slewing reference speed of the crane base, and craneSetPoint1 [2]- craneSetPoint1 [4] separately are the interfaces for the hydraulic actuator reference speed. In this way, by inputting the desired value of the above parameters, the crane can perform lifting, lowering and transferring operations in a certain operating space. The other four FMUs around the crane model are to perform control strategies. The VesselModel here provides information about the ship’s motion, i.e., the speed in DOF of heave and rolling. TipSetPoint provides the desired velocity of the tip for the crane as a reference value for its control. There are two modes of compensation control. TipController is the developed controller under crane compensation mode, and AHCController is the developed controller under winch compensation mode. These two different strategies enable data analysis of the system response by comparing the cases with and without controllers; moreover, it is an indispensable basis for advanced controller development and onboard support.

Interfaces connections among sub-model components of a Palfinger crane
Motion and Force Transfer.
During crane operations, there is a coupling relationship between the ship and the crane that interacts. The center of gravity of the crane system will change due to the change in the posture of the crane joints and cylinders as well as the different positions of the payload at different times, which results in a change in the inertia matrix of the vessel. Therefore, we consider the conservative forces such as gravity generated by the crane and payload as external forces and apply them to different points of the vessel hull. The transfer relations of force and motion containing interfaces are shown in Fig. 4. In detail, the diagram specifics the relative position of the ship's center of gravity and the crane's center of gravity. The displacements and angular displacements of the ship in three different directions caused by the waves are also the movements of the crane base. The forces generated by the crane and the payload as well as their points of attack are reflected in the forces applied to the hull in different directions.

Relationship of motion and force transfer between the vessel and the crane
4 Case Study
In this section, we introduce the configuration of R/V Gunnerus where the purpose is to employ the vessel as the testbed to test the present system with two cases. As shown in Fig. 5, the Gunnerus is equipped with the latest technology supporting all kinds of research, which is also one of the most important educational platforms. Figure 6 presents the Palfinger crane mounted on NTNU R/V Gunnerus. Some main parameters are given in Table 1.

NTNU research vessel R/V Gunnerus [23]

Palfinger crane onboard R/V Gunnerus
4.1 Case 1: Crane with Payload in Different Environment Conditions
In the first case, different environmental conditions are set as input to analyze the rolling motion of the ship, where we consider the direction of the environmental loads including wave, current and wind are varied from six different angles of three different sea state levels. The crane keeps in a fixed posture without any operation but with a 700 kg payload. The DP controller is activated at the 50s from the start of the simulation.
Figure 7 shows the eight different cases of environmental loads direction angles. Table 2 shows the parameters of three sea states in the co-simulation environment setting. The ship roll angle responses of the ship are processed to box-plot in Fig. 8, where it can be seen that the roll angle domains vary from the different directions of environmental loads. The balanced roll angle is not 0 but a positive angle, which indicates the center of gravity changes due to the installation of the crane. However, the amplitudes of the roll angles increase apparently with the increase of the sea state. The ship gets the most violent roll motion when the direction of environmental loads is 45º or 315º, while the mildest roll motion appears at the time the foreside of the ship has the same or opposite direction as the environmental loads.

Eight different environmental conditions of wave and current direction

Roll angles of the ship motion in different environmental conditions
4.2 Case 2: Crane Operations in Waves
In Case 2, we aim to simulate the crane operations in waves. Two Palfinger crane operations are defined in the scenario. The first operation is the slewing action of the crane base, and the second operation is the extension of the telescope cylinder. The animations of the operations are shown in Fig. 9. The environment parameters are set as the values of the slight state in Table 2. The direction of the environmental loads is 45º. The DP controller is also activated at the 50 s from the start of the simulation.

Animations of the crane operation
As shown in Fig. 10., there are two operation commands for the crane actuators. At the 220 s from the start of the simulation, the slewing joint is given an operating signal to the positive direction lasting 60 s to the 280 s, with the result of the crane base slewing around 30º. The displacement of the crane tip relative to the hull coordinate frame in the north and east changes. Instead of remaining relatively stationary with the ship body, it is subjected to the environmental loads at sea and shows a simple harmonic motion. During this operation, the angle response of the ship roll motion decreases. After 40 s, the telescope cylinder starts to extend from its initial length of 1.2 m to around 5.5 m. The displacement of the crane tip in the north and east directions changes again. Instead of simple harmonic motion, it shows a linear change and finally stabilizes at the desired position. During the two operations, the displacement of the crane tip in the down direction keeps stable because it has the same motion frequency as the ship hull. In overall, the ship roll motion is subjected to the operations to some degree, which can be seen in the frequency of the roll angle response. The crane tip position response reflects the actions of the crane actuators from another perspective. The crane operation without controllers in waves is affected by the ship roll motion subjected to the sea state; meanwhile, it also has an impact on the ship motion in waves, which is a coupling interaction between each other.
5 Conclusion
In this paper, we presented a system based on the platform Vico, which is developed based on co-simulation technology. A marine operation system is constructed by functional mock-up units (FMUs) exported from sub-models. Two case studies are conducted from the perspective of testing the co-simulation system regarding the configuration of the components and scenarios. The results of the case studies show that the system can perform the simulation of marine operations including the environment configuration and marine crane operations, which verify the effectiveness of the system. The ship motion roll is subjected to the direction of the environmental loads with the 45º/135º as the most violent angle and the 0º/180º as the mildest angle. The system responses of the crane operations in waves indicate that the ship motion and the crane operations affect each other in some way due to the change of the center of gravity, which also supports that there are coupling interactions between the ship and the crane. This can also give a reference for the dynamic positioning system to position the ship in a certain orientation during marine operations. In future work, the system can provide a foundation for further research on advanced onboard support such as system decision and control by sensitive analysis under different offshore conditions with complex marine operations.

Operation commands and system response of the ship and crane
References
Moi, T., Cibicik, A., Rølvåg, T.: Digital twin based condition monitoring of a knuckle boom crane: an experimental study. Eng. Fail. Anal. 112, 104517 (2020)
Intelligent Systems Lab @ NTNU Aalesund: Intelligent Systems Lab webpage. http://org.ntnu.no/intelligentsystemslab/
Hatledal, L.I., Chu, Y., Styve, A., Zhang, H.: Vico: an entity-component-system based co-simulation framework. Simul. Model. Pract. Theory 108, 102243 (2021)
Chu, Y., Sanfilippo, F., Æsøy, V., Zhang, H.: An effective heave compensation and anti-sway control approach for offshore hydraulic crane operations. In: 2014 IEEE International Conference on Mechatronics and Automation, pp. 1282–1287. IEEE (2014)
Chu, Y., Hatledal, L.I., Zhang, H., Æsøy, V., Ehlers, S.: Virtual prototyping for maritime crane design and operations. J. Mar. Sci. Technol. 23(4), 754–766 (2017). https://doi.org/10.1007/s00773-017-0509-z
Abdel-Rahman, E.M., Nayfeh, A.H., Masoud, Z.N.: Dynamics and control of cranes: a review. J. Vib. Control 9(7), 863–908 (2003)
Tysse, G.O., Egeland, O.: Dynamic interaction of a heavy crane and a ship in wave motion. MIC—Model. Identif. Control 39(2), 45–60 (2018)
La Hera, P.M., Morales, D.O.: Modeling dynamics of an electro-hydraulic servo actuated manipulator: a case study of a forestry forwarder crane. In: World Automation Congress 2012, pp. 1–6. IEEE (2012)
Chu, Y., Æsøy, V.: A multi-body dynamic model based on bond graph for maritime hydraulic crane operations. In: International Conference on Offshore Mechanics and Arctic Engineering, Vol. 56475. American Society of Mechanical Engineers (2015)
Chu, Y., Æsøy, V., Zhang, H., Bunes, O.: Modelling and simulation of an offshore hydraulic crane. In: ECMS, pp. 87–93 (2014)
Skjong, S., Pedersen, E.: Model-based control designs for offshore hydraulic winch systems. Ocean Eng. 121, 224–238 (2016)
Weymouth, G.D., Yue, D.K.: Physics-based learning models for ship hydrodynamics. J. Ship Res. 57(01), 1–12 (2013)
Almutairi, N.B., Zribi, M.: Sliding mode control of a three-dimensional overhead crane. J. Vib. Control 15(11), 1679–1730 (2009)
Dahmann, J.S., Fujimoto, R.M., Weatherly, R.M.: The department of defense high level architecture. In: Proceedings of the 29th Conference on Winter Simulation, pp. 142–149 (1997)
Blockwitz, T., et al.: Functional mockup interface 2.0: the standard for tool independent exchange of simulation models. In: Proceedings (2012)
Schweiger, G., et al.: An empirical survey on co-simulation: promising standards, challenges and research needs. Simul. Model. Pract. Theory 95, 148–163 (2019)
Köhler, J., Heinkel, H.M., Mai, P., Krasser, J., Deppe, M., Nagasawa, M.: Modelica-association-project system structure and parameterization–early insights. In: The First Japanese Modelica Conferences, no. 124, pp. 35–42. Linköping University Electronic Press (2016)
Open simulation platform. Open simulation platform joint industry project for the maritime industry (2020). https://opensimulationplatform.com/
Hassani, V., et al.: Virtual prototyping of maritime systems and operations. In: International Conference on Offshore Mechanics and Arctic Engineering, vol. 49989, p. V007T06A018. American Society of Mechanical Engineers (2016)
Chu, Y., Hatledal, L.I., Æsøy, V., Ehlers, S., Zhang, H.: An object-oriented modeling approach to virtual prototyping of marine operation systems based on functional mock-up interface co-simulation. J. Offshore Mech. Arct. Eng. 140(2) (2018)
Fossen, T.I.: A nonlinear unified state-space model for ship maneuvering and control in a seaway. Int. J. Bifurcat. Chaos 15(09), 2717–2746 (2005)
Hassani, V., Ross, A., Selvik, Ø., Fathi, D., Sprenger, F., Berg, T.E.: Time domain simulation model for research vessel Gunnerus. In: International Conference on Offshore Mechanics and Arctic Engineering, vol. 56550, p. V007T06A013. American Society of Mechanical Engineers (2015)
Norges teknisk-naturvitenskapelige universitet: Research vessel: R/V Gunnerus. https://www.ntnu.edu/oceans/gunnerus
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Liu, Z., Chu, Y., Li, G., Zhang, H. (2023). A Co-simulation-Based System Using Vico for Marine Operation. In: Masci, P., Bernardeschi, C., Graziani, P., Koddenbrock, M., Palmieri, M. (eds) Software Engineering and Formal Methods. SEFM 2022 Collocated Workshops. SEFM 2022. Lecture Notes in Computer Science, vol 13765. Springer, Cham. https://doi.org/10.1007/978-3-031-26236-4_20
Download citation
DOI: https://doi.org/10.1007/978-3-031-26236-4_20
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-26235-7
Online ISBN: 978-3-031-26236-4
eBook Packages: Computer ScienceComputer Science (R0)