
Abstract
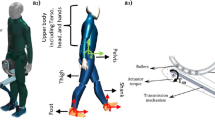
This paper presents the development of the inverse dynamic model for the RECOVER parallel robot, which is used in lower limbs stroke rehabilitation, more precisely in rehabilitation exercises for hip flexion/extension, knee flexion, plantar flexion/dorsiflexion, and inversion/eversion of the ankle. The inverse dynamic model is obtained using the concept of virtual work and the lumped masses approach. The developed model facilitates in-depth analysis of the dynamic capabilities of the RECOVER robot and the development of a precise and effective robotic-assisted procedure for lower limb rehabilitation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Pyo, S., Yoon, J., Oh, M.-K.: A novel robotic knee device with stance control and its kinematic weight optimization for rehabilitation. Robotica 32, 1245–1263 (2014). https://doi.org/10.1017/S0263574714001453
Prieto, P., Auat, F., Escobar, M., Vallejos, R., Maldonado, P., Larrain, C., Serey, M.: Robotic Care: A Low Cost Design to Assist Therapy for Brain Stroke Rehabilitation. Proceedings of the Design Society: International Conference on Engineering Design. 1, 975–984 (2019). https://doi.org/10.1017/dsi.2019.103
Nef, T., Mihelj, M., Riener, R.: ARMin: a robot for patient-cooperative arm therapy. Med Biol Eng Comput. 45, 887–900 (2007). https://doi.org/10.1007/s11517-007-0226-6
Cafolla, D., Russo, M., Carbone, G.: Design of CUBE, a cable-driven device for upper and lower limb exercising. In: Carbone, G., Ceccarelli, M., Pisla, D. (eds.) New trends in medical and service robotics, pp. 255–263. Springer International Publishing, Cham (2019)
Banica, A., Gherman, B., Tohanean, N., Antal, T., Pisla, A., Abrudan, C., Carbone, G., Pisla, D.: Inverse dynamic modeling of a parallel elbow rehabilitation robot for spasticity treatment. In: Müller, A., Brandstötter, M. (eds.) Advances in service and industrial robotics, pp. 392–400. Springer International Publishing, Cham (2022)
Vaida, C., Birlescu, I., Pisla, A., Ulinici, I., Tarnita, D., Carbone, G., Pisla, D.: Systematic design of a parallel robotic system for lower limb rehabilitation. IEEE Access. 8, 34522–34537 (2020). https://doi.org/10.1109/ACCESS.2020.2974295
Carbone, G., Gherman, B., Ulinici, I., Vaida, C., Pisla, D.: Design issues for an inherently safe robotic rehabilitation device. In: Ferraresi, C., Quaglia, G. (eds.) Advances in service and industrial robotics, pp. 1025–1032. Springer International Publishing, Cham (2018)
Bouri, M., Le Gall, B., Clavel, R.: A new concept of parallel robot for rehabilitation and fitness: The Lambda. In: 2009 IEEE International conference on robotics and biomimetics (ROBIO), pp. 2503–2508 (2009)
Akdoğan, E., Adli, M.A.: The design and control of a therapeutic exercise robot for lower limb rehabilitation: Physiotherabot. Mechatronics 21, 509–522 (2011). https://doi.org/10.1016/j.mechatronics.2011.01.005
Vaida, C., Birlescu, I., Pisla, A., Carbone, G., Plitea, N., Ulinici, I., Gherman, B., Puskas, F., Tucan, P., Pisla, D.: RAISE−An innovative parallel robotic system for lower limb rehabilitation. In: Carbone, G., Ceccarelli, M., Pisla, D. (eds.) New trends in medical and service robotics, pp. 293–302. Springer International Publishing, Cham (2019)
Abdellatif, H., Heimann, B.: Computational efficient inverse dynamics of 6-DOF fully parallel manipulators by using the Lagrangian formalism. Mech. Mach. Theory 44, 192–207 (2009). https://doi.org/10.1016/j.mechmachtheory.2008.02.003
Plitea, N., Szilaghyi, A., Cocorean, D., Vaida, C., Pisla, D.: Inverse dynamics and simulation of A 5-DOF modular parallel robot used in brachytherapy. Proceedings of the Romanian academy series A−Mathematics physics technical sciences information science. 17, 67–75 (2016)
Dasgupta, B., Mruthyunjaya, T.S.: Closed-form dynamic equations of the general stewart platform through the newton-euler approach. Mech. Mach. Theory 33, 993–1012 (1998). https://doi.org/10.1016/S0094-114X(97)00087-6
Li, Y., Xu, Q.: Dynamic analysis of a modified DELTA parallel robot for cardiopulmonary resuscitation. In: 2005 IEEE/RSJ International conference on intelligent robots and systems, pp. 233–238 (2005)
Gherman, B., Birlescu, I., Plitea, N., Carbone, G., Tarnita, D., Pisla, D.: On the singularity-free workspace of a parallel robot for lower-limb rehabilitation. Proceedings of The Romanian Academy, Series A. 20, 383–391 (2019)
Nadas, I., Gherman, B., Albert, S., Surducan, V., Pop, N., Carbone, G., Pisla, D.: Innovative development of a parallel robotic system for lower limb rehabilitation. Acta Tech Napocensis−Series: Appl Math, Mech, Eng. 64(1-S2), (2021)
Pisla, D., Nadas, I., Tucan, P., Albert, S., Carbone, G., Antal, T., Banica, A., Gherman, B.: Development of a control system and functional validation of a parallel robot for lower limb rehabilitation. Actuators. 10, 277 (2021). https://doi.org/10.3390/act10100277
Nadas, I., Tucan, P., Gherman, B., Banica, A., Rednic, V., Carbone, G., Pisla, D.: On the design and validation of a parallel robot for lower limb rehabilitation. Rom. J. Tech. Sciences. Appl. Mechanics. 67, 187–187 (2022)
Carbone, G., Plitea, N., Gherman, B.G., Vaida, C., Pisla, D., Birlescu, I., Craciun, F., Nadas, I., Tucan, P., Pop, N.: Parallel Robot for Medical Recovery of Lower Limbs. Patent Number: RO133815B1.Publication Date: 2020–02–28 Technical University of Cluj Napoca.
Plitea, N., Gherman, B., Carbone, G., Ceccarelli, M., Vaida, C., Banica, A., Pisla, D., Pisla, A.: Kinematic analysis of an exoskeleton-based robot for elbow and wrist rehabilitation. In: Carvalho, J.C.M., Martins, D., Simoni, R., Simas, H. (eds.) Multibody mechatronic systems, pp. 424–433. Springer International Publishing, Cham (2018)
Gherman, B., Pisla, D., Vaida, C., Plitea, N.: Development of inverse dynamic model for a surgical hybrid parallel robot with equivalent lumped masses. Robot. Comput.-Integr. Manuf. 28, 402–415 (2012). https://doi.org/10.1016/j.rcim.2011.11.003
NX | Siemens Software, https://www.plm.automation.siemens.com/global/en/products/nx/
Acknowledgements
This work was supported by a grant from the Romanian Ministry of Research and Innovation, CCCDI—UEFISCDI, project number PN-III-P2-2.1-PED-2021-3430/608PED/2022 (Hope2Walk) within PNCDI III.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Nadas, I. et al. (2023). Inverse Dynamic Modeling of a Parallel Robot for Lower Limb Rehabilitation. In: Doroftei, I., Nitulescu, M., Pisla, D., Lovasz, EC. (eds) Proceedings of SYROM 2022 & ROBOTICS 2022. IISSMM 2022. Mechanisms and Machine Science, vol 127. Springer, Cham. https://doi.org/10.1007/978-3-031-25655-4_19
Download citation
DOI: https://doi.org/10.1007/978-3-031-25655-4_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-25654-7
Online ISBN: 978-3-031-25655-4
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)