
Abstract
The purpose of this study is to analyze the pavement-friendly performance of an agricultural truck with two types of hydro-pneumatic suspension (HPS) struts on dynamic load coefficient (DLC). The nonlinear dynamical models of two different types of HPS struts with one gas chamber and two oil chambers (Model 1) and with one gas chamber and three oil chambers (Model 2) are set up to calculate their nonlinear vertical forces. A quarter–vehicle mathematical model of an agricultural truck is set up for the analysis of the nonlinear vertical forces of two proposed suspensions which is implemented in MATLAB/Simulink platform. The obtained results indicated that the pavement-friendly performance of Model 2 is better than performance of Model 1. Especially, the values of DLC at axle of vehicle with Model 2 reduce by 6.97% in comparison with Model 1 when vehicle moves on ISO class C road surface at vehicle speed of 40 km/h and full load.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Hydro-pneumatic suspension (HPS) system is applied widely in engineering fields because the gas absorbs excessive force while the oil is nonlinear elasticity and good vibration damping perforation. A multi body co-simulation approach was proposed to investigate the effects of HPS parameters on the ride safety [1]. A semi-active HPS based on the electro-hydraulic proportional valve control was proposed using the control strategy to adjust the damping force of the semi-active hydro-pneumatic suspension [2]. A HPS model based on fractional order was built with the advantage of fractional order in viscoelastic material modeling considering the mechanics property of multiphase medium of hydro-pneumatic suspension system [3]. The ride comfort of vehicle using a HPS applied with the semi-active control was analyzed and compared with a passive cab suspension [4]. A hydro-pneumatic inerter-based suspension system theoretical model was developed to analyze its performance which was controlled to improve vehicle ride comfort based on the mechanical network theory of inerter and semi-active control [5]. The performance of the hydro-pneumatic suspension system of heavy truck on the ride quality of road surfaces was proposed to compare to the rubber and air spring suspension systems based on a full dynamic model of a heavy vehicle [6]. The performance of the hydro-pneumatic suspension system of heavy truck on vehicle ride comfort was proposed and compared to those of rubber, leaf and air springs of the suspension systems [7, 8]. A hydro-pneumatic suspension strut concept with integrated two gas chambers was proposed to realize nearly symmetric stiffness properties in compression and rebound, and progressively hardening roll stiffness characteristics [9]. The nonlinear stiffness and damping properties of a simple and low cost design of a hydro-pneumatic suspension (HPS) strut that permits entrapment of gas into the hydraulic fluid were analyzed by both experimental and numerical methods [10]. The semi-active hydro-gas suspension was proposed for a tracked vehicle to improve ride comfort performance, without compromising the road holding and load carrying capabilities of the passive suspension [11]. The HPS optimal parameters of a multi-axle heavy motorized wheel dump truck were found out based on virtual and real prototype experiment integrated Kriging model [12]. A dual-chamber HPS was proposed and analyzed the effect of various suspension parameters on the storage stiffness and damping coefficient [13]. This proposal study is to analyze the performance of an agricultural truck with two types of HPS struts in terms of the negative impact on road surface. The nonlinear models of two types of hydro-pneumatic suspension (HPS) struts which consist of two oil chambers and one gas chamber (Model 1) and three oil chambers and one gas chamber (Model 2) are set up to determine their nonlinear vertical forces and then it is connect with a quarter–vehicle mathematical model of an agricultural truck to analyze and evaluate their effectiveness on the dynamic load coefficient (DLC).
2 Mathematical Model of HPS Strut
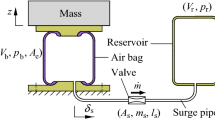
Structural schematic of two types of HPS struts with two oil chambers and one gas chamber (Model 1) and three oil chambers and one gas chamber (Model 2) is show in Figs. 1 and 2 which consist of the main oil chamber (1), oil chamber (2), ring oil chamber (3), the gas chamber (4), the oil pressures of the oil chambers (1), (2), (3) and gas chamber (4) p1, p2, p3 and pa, the effective areas of cylinder, rod and floating piston and gas chamber, A1, A2, and A3, the area of the orifices between oil chamber (1) and chamber (2) and the area of the orifices between oil chamber (1) and chamber (3) A12 and A13, the vertical displacements of vehicle axle, floating piston, and vehicle body za, zd and zb. Nonlinear dynamic model of two types of HPS struts is shown in Fig. 3 which consist of the stiffness and damping coefficients of Model 1 kh and ch13, the stiffness coefficient and two damping coefficients of Model 2 kh, c12 and c13, vehicle axle and vehicle body masses ma and mb and the vertical forces of Model 1 and Model 2 Fht and Fhn.
From Fig. 3a, the vertical dynamic force of Model 1 is determined by
where, Fk is the elastic force of the gas chamber and Fc is the damping force of the oil chambers.
The elastic force of the gas chamber of Model 1 is determined by
The pressure in the gas chamber is defined as an adiabatic process following the laws of thermodynamics
where p0 and V0 are the initial absolute pressure and volume in the gas chamber, pa and Va are the absolute pressure and volume in the gas chamber, n is the polytrophic rate (1 < n < 1.4).
Combination of Eqs. (4) and (2), the elastic force of the gas chamber of Model 1 is achieved by
The damping force of Model 1 is determined by
where A1, A2, and A3 are the area of cylinder, rod and floating piston, p1 and p3 are the pressures in the oil chamber (1) and chamber (3).
The flow rate through the orifice is determined by:
where, Cd is coefficient of discharge, A13 is the area of the orifices and ρ is the density of oil.
On the basic of volume balance, the flow rate is inferred by
Combination of Eqs. (7) and (8), the relationship p1 and p3 is achieved by

Model 1

Model 2

Nonlinear dynamic model of two types of HPS struts
The differential motion equation of floating piston can be determined by
The Eq. (10) can be rewritten by
Combination of Eqs. (11), (9) and (6), the damping force of Model 1 is achieved by
From Fig. 3b, the vertical dynamic force of Model 2 can be determined by
where, Fk is the elastic force of the gas chamber, Fcn is the damping force of the oil chambers and it is achieved by
3 Quarter–vehicle Dynamic Model of a Mining Dump Truck
The schematic diagram of 2-DOFs quarter–vehicle dynamic model of an agricultural truck with two models of HPS struts is shown in Fig. 4 which consists of the tire stiffness and damping coefficients kt and ct, the random road surface roughness q.

2-DOFs quarter–vehicle dynamic model
The equations of vehicle motion of Fig. 4 are written as follows
Road surface excitations: The random road surface roughness of random white noise is used as excitation source waveform for vehicle [18], the random road profile is produced by filtering the white noise using the following mathematical model of the road roughness.
where, Gq(n0) is the road roughness coefficient which is defined for typical road classes from A to H according to ISO 8068(2016) [17], n0 is a reference spatial frequency which is equal to 0.1 m, v(t) is the speed of vehicle; f0 is a minimal boundary frequency with a value of 0.0628 Hz, n0 is a reference spatial frequency which is equal to 0.1 m, w(t) is a white noise signal.
Dynamic load coefficient (DLC): To analyze the pavement-friendly performance of two types of hydro-pneumatic suspension systems, the DLC is chosen as objective function which is defined by a ratio of the root mean square of the vertical dynamic tire force over static load [14,15,16] as follows:
where, FT,RMS, Fs are the root mean square of the vertical dynamic and the static tire force.
4 Results and Discussion
In order to analyze the pavement-friendly performance of two HPS struts (Model 1 and Model 2), the quarter–vehicle mathematical model of an agricultural truck is solved in Matlab/Simulink software under the road surface excitations and a set of vehicle parameters in Table 1. The simulation results of the vertical dynamic tire load at axle with two types of HPS struts when vehicle moves on the ISO class C at the speed of 40 km/h and full load are shown in Fig. 5. The results of Fig. 5 reflect that the peak amplitudes of dynamic tire force with Model 2 are smaller than Model 1.

Dynamic tire forces at axle of vehicle with two types
The pavement-friendly performance of two HPS struts of two types of HPS struts will be analyzed and compared in next sections when vehicle moves under the different operating conditions.
Road surface condition: In order to evaluate the pavement-friendly performance of two HPS struts, the road surface conditions from ISO class A road surface to ISO class E road surface are considered when vehicle moves at vehicle speed of 40 km/h and full load. The DLC values in comparison with both two types of Models under variable road surface conditions are shown in Fig. 6. The results of Fig. 6 shows that the DLC values with both two types of Models increase rapidly when the road surface quality deteriorates. The DLC values with Model 2 respectively reduce 2.69%, 4.41%, 6.97%, 11.54% and 19.27% in comparison with Model 1 when vehicle moves on from ISO class A road surface to ISO class E road surface which prove that the negative impact on road surface with Model 2 has improved significantly in comparison with Model 1.
Vehicle speed conditions: The different speed conditions from vehicle speed of 20 km/h to vehicle speed of 70 km/h are chosen to compare the pavement-friendly performance of two types when vehicle moves on ISO class D road surface and full load. The DLC values in comparison with both two types of Models at different speed conditions are shown in Fig. 7. The results of Fig. 7 shows that the DLC values with Model 2 are increase with the increase of vehicle speed. The DLC values with Model 2 respectively reduce 5.74%, 5.88%, 6.97%, 7.96%, 8.68% and 8.61% in comparison with Model 1 with the change of vehicle speed from 20 km/h to 70 km/h. These results show that the pavement-friendly performance of Model 2 is improved significantly in the high vehicle speed region.
Vehicle body mass conditions: To analysis the pavement-friendly performance of two HPS struts when the value of vehicle body mass changes, the mb values from 25% mb to 200% mb are chosen when vehicle moves on ISO class C road surface at vehicle speed of 40 km/h. The DLC values in comparison with both two types of Models under different vehicle body mass mb are shown in Fig. 8. The results of Fig. 8 show that the DLC values of both two types of Models quickly decrease when the mb value increases. However, mb value increases, it will affect on the durability and safety of vehicle components. The DLC values with Model 2 respectively reduce 3.11%, 4.86%, 6.78%, 6.97%, 4.23%, 4.18%, 5.75% and 4.8% in comparison with Model 1 with the change of mb value from 25% mb to 200% mb. The negative impact on road surface with Model 2 is also significantly improved in comparison with Model 1 with the change of vehicle body mass.

DLC values of both two models under different road surface conditions

DLC values of both two models at different vehicle speed conditions

DLC values of both two models under the different vehicle body mass
5 Conclusions
In this study, a quarter–vehicle mathematical model of an agricultural truck was set up to analyze and evaluate the pavement-friendly performance of two HPS struts. The major conclusions drawn from the analysis can be summarized as follows: (1) The DLC values with both two types of Models increase rapidly when the road surface quality deteriorates. The DLC values with Model 2 respectively reduce 2.69%, 4.41%, 6.97%, 11.54% and 19.27% in comparison with Model 1; (2) The DLC values with Model 2 respectively reduce 5.74%, 5.88%, 6.97%, 7.96%, 8.68% and 8.61% in comparison with Model 1 with the change of vehicle speed from 20 km/h to 70 km/h; and (3) The DLC values with Model 2 respectively reduce 3.11%, 4.86%, 6.78%, 6.97%, 4.23%, 4.18%, 5.75% and 4.8% in comparison with Model 1 with the change of mb value from 25% mb to 200% mb.
References
Han, S., Chao, Z., et al: Research on the effects of hydropneumatic parameters on tracked vehicle ride safety based on cosimulation. In: Shock and Vibration, pp. 1–10 (2017)
Yue, W., Li, S., et al: Investigation of semi-active hydropneumatic suspension for a heavy vehicle based on electro-hydraulic proportional valve. World J. Eng. Technol. 696–706 (2017)
Zhang, J., Chen, S., et al: Research on modeling of hydropneumatic suspension based on fractional order. Math. Probl. Eng. (2015)
Sim, K., et al: Effectiveness evaluation of hydro-pneumatic and semi-active cab suspension for the improvement of ride comfort of agricultural tractors. J. Terramech. 69, 23–32 (2017)
Yin, Y., et al.: Multi-performance analyses and design optimisation of hydro-pneumatic suspension system for an articulated frame-steered vehicle. Int. J. Vehicle Mech. Mob. 57, 108–133 (2019)
Long, L.X., et al: Performance analysis of the hydro-pneumatic suspension system of heavy truck. Int. J. Mech. Eng. Technol. (IJMET) 9, 1128–1139 (2019)
Long, L.X., Van Quynh, L., et al: A comparison of ride performance of hydro-pneumatic suspension system with those of rubber and leaf suspension systems. IOP Conf. Ser.: Mater. Sci. Eng. 914, 012037 (2020)
Long, L.X., Van Quynh, L., et al: Ride performance evaluation of air and hydro-pneumatic springs of suspension system. IJARET 12(1), 439–447 (2021)
Cao, D., et al: Analysis of a twin-gas-chamber hydro -pneumatic vehicle suspension. In: Advances in Dynamics, Instrumentation and Control (2007)
Yin, Y., Rakheja, S., et al: Effects of entrapped gas within the fluid on the stiffness and damping characteristics of a hydro-pneumatic suspension strut. SAE Int. J. Commer. Veh. 10(1) (2017)
Solomon, U., et al.: Semi-active hydro-gas suspension system for a tracked vehicle. J. Terrramech. 48(4), 225–239 (2011)
Gong, B., et al.: Ride comfort optimization of a multi-axle heavy motorized wheel dump truck based on virtual and real prototype experiment integrated Kriging model. Adv. Mech. Eng. 7(6), 1–15 (2015)
Sang, Z., et al.: Numerical analysis of a dual-chamber hydro-pneumatic suspension using nonlinear vibration theory and fractional calculus. Adv. Mech. Eng. 9(5), 1–13 (2017)
Quynh, L.V., Tuan, N.V., et al: Optimal design parameters of air suspension systems for semi-trailer truck. Part 1: modeling and algorithm. Vibroengineering PROCEDIA 33, 72–77 (2020)
Buhari, R., Md Rohani, M., et al: Dynamic load coefficient of tyre forces from truck axles. Appl. Mech. Mater. 405(408), 1900–1911 (2013)
Quynh, L.V., Tuan, N.V., et al: Optimal design parameters of air suspension systems for semi-trailer truck. Part 2: results and discussion. Vibroengineering PROCEDIA 33, 147–152 (2020)
ISO 8608: Mechanical Vibration-Road Surface Profiles-Reporting of Measured Data. International Organization for Standardization (2016)
Long, L.X., Quynh, L.V., Cuong, B.V.: Study on the influence of bus suspension parameters on ride comfort. Vibroengineering PROCEDIA 21, 77–82 (2018)
Acknowledgment
The work described in this paper was supported by Thai Nguyen University of Technology.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Hung, T.T., Long, L.X., Van Tuan, N., Tan, H.A., Truyen, V.T. (2023). Pavement-Friendly Performance Analysis of an Agricultural Truck with Two Types of Hydro-Pneumatic Suspension Struts. In: Nguyen, D.C., Vu, N.P., Long, B.T., Puta, H., Sattler, KU. (eds) Advances in Engineering Research and Application. ICERA 2022. Lecture Notes in Networks and Systems, vol 602. Springer, Cham. https://doi.org/10.1007/978-3-031-22200-9_82
Download citation
DOI: https://doi.org/10.1007/978-3-031-22200-9_82
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-22199-6
Online ISBN: 978-3-031-22200-9
eBook Packages: EngineeringEngineering (R0)