
Abstract
The paper studies a robust adaptive fast terminal sliding mode controller (FTSMC) based on a radial basis function neural network (RBF NN) for a dual-arm robot manipulator system that coordinates the motion of the general object. First, kinematics, a general dynamic model of the system consisting of manipulators and the object, is inferred about the position and direction of the object as the states of the derived model. Second, an FTSMC method is designed, followed by the construction of two RBF systems: one approximates uncertainties and external disturbances, and the other estimates the force applied to the object according to the object’s uncertainty model. Next, the Lyapunov theory is employed to demonstrate the stability of the closed-loop system and derive the adaptation laws for RBF NN. Finally, simulation results of the dual-arm robot system with three degrees of freedom (3-DOF) manipulators are presented to illustrate the effectiveness of the proposed method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Dual-arm robotic
- Fast terminal sliding mode controller (FTSMC)
- Radial basis function (RBF) neural network
1 Introduction
Nowadays, dual-arm robot manipulator robots are increasingly being applied in many different fields. Challenges in cooperative control include synchronizing position and controlling the force applied to an object. If too much force is applied to the object may deform its shape, or if the robot does not follow the predetermined path well, it can endanger the operator due to sudden movements. Therefore, it is necessary to design an efficient controller for this system to control position, orientation, and force with an uncertain dynamic model.
The problem of control under the kinematic uncertainty of the system has been solved by proposing the application of advanced control theories such as the sliding mode control in [1, 2] designed a controller for the robot to improve trajectory tracking quality. An adaptive controller for a dual-robot to hold an object with an unknown center of mass and moment of inertia has been proposed in [3]. A hybrid adaptive controller has been proposed in [4] to improve the efficiency of motion tracking and force adjustment when a cooperative dual-arm robot grasps an unknown object. In [5], a non-chattering robust sliding controller enhanced by a fuzzy logic unit to track the desired trajectory with high accuracy and safely transport the object. In addition, terminal sliding mode control (TSMC) is proposed by [6, 7] to improve the design of the sliding surface and lead to the tracking errors converging to zero in a finite time. In [8, 9] the authors present fast terminal sliding mode control (FTSMC) for nonlinear systems and demonstrate the convergent feature of the controller superior to the conventional sliding mode control.
An adaptive hybrid position/force controller using fuzzy backstepping has been proposed in [10], the fuzzy logic approximation properties are used to estimate the unknown dynamics of the system. The controller ensures that and the tracking errors of both position and force converge to the desired small value by selecting the appropriate design parameters. In [11] proposed an adaptive neuron force/position controller, the controller achieves the desired trajectories of the object and internal force tracking. A feedforward neural network is used to learn the unknown dynamics of the system with updated law based on Lyapunov stability analysis. Some research for the combined dual-arm robot system has solved two problems simultaneously: uncertain dynamic and uncertain environment. The neuron impedance controller has been proposed in [12] with two control loops, a position control loop and a force control loop to guarantee the desired trajectory and cooperation force. Several other powerful approximation techniques are based on differential equations or polynomials to estimate the uncertainty dynamic and disturbances of a multi-manipulators system moving an object [13, 14]. The robust adaptive controller proposed in [15] to deal with the problem of uncertain base coordinates, uncertainty model, and external disturbance, using the RBF neural network to estimate all kinds of these uncertainties.
Inspired by the analysis of previous studies mentioned above, in this paper, we focus on developing a generalized model for the dual-arm robot manipulator. Besides, an adaptive fast terminal sliding mode control is based on two neural networks to deal with nonlinear elements, uncertainties, and external disturbances. Finally, simulation results and conclusions are made to verify and show the achievements of this paper.
2 Dynamics of the Dual-Arm Robot–Object System
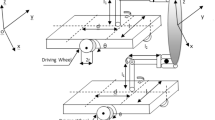
A dual-robot system under this study is illustrated in Fig. 1. The system consists of two manipulators arranged sort by duality, each arm is a robot with n degrees of freedom.
The coordinate frames are defined as follows:
-
{OXY}: The reference coordinate frame, located at the origin of the first robot arm;
-
{ovxvyv}: An object frame, located at the mass center of the object.
Ei \((i = 1 - 2)\) is the contact of the end-effector of the arm-robot ith with surface of the object; \(z = {[}r_{{o_{v} O}}^{T} ,\,\,\,\,\phi_{{o_{v} O}}^{T} {]}^{T}\) denotes the position \(r_{{o_{v} O}} = {[}x,\,y,\,z{]}^{T}\) vector and orientation \(\,\phi_{{o_{v} O}} = {[}\psi ,\,\,\varphi ,\,\theta {]}^{T}\) vector of the object frame concerning the reference coordinate frame; \(z_{{E_{i} o_{v} }} = {[}r_{{E_{i} o_{v} }}^{T} ,\,\,\,\phi_{{E_{i} o_{v} }}^{T} {]}^{T}\) denotes the position and orientation vector of the object frame concerning Ei frame.

Model of a dual-arm robot holding an object
The position and orientation of the object is determined through the homogenous transformation matrices of the corresponding coordinate frames and represented as follows:
From Eq. (1), the kinematic relationship between the object and the joint angles of the manipulators are built. From there, the relationship between the object’s motion velocity and the joint’s velocity is obtained [11]
That means
where \(A = {[(}A_{1}^{ - 1} )^{T} ,\,(A_{2}^{ - 1} {)}^{T} {]}^{T}\); \(\,B = {[( - }A_{1}^{ - 1} \dot{A}_{1} A_{1}^{ - 1} )^{T} ,\,\,( - A_{2}^{ - 1} \dot{A}_{2} A_{2}^{ - 1} {)}^{T} {]}^{T} .\)
The dynamic of the dual-arm can be formulated as in [10]
where \({\varvec{q}} = [{\varvec{q}}{\mkern 1mu}_{1}^{T} ,\,{\mkern 1mu} {\varvec{q}}_{2}^{T} ]^{T}\) is the joint angle \((2n \times 1)\) vector; \({\varvec{\tau}} = {[}{\varvec{\tau}}_{1}^{T} ,\,\,{\varvec{\tau}}_{2}^{T} {]}^{T}\) denotes the torque \((2n \times 1)\) vector applied to the joints; \({\varvec{\tau}}_{d} = {[}{\varvec{\tau}}_{d1}^{T} ,\,\,{\varvec{\tau}}_{d2}^{T} {]}^{T}\) denotes bounded unknown disturbances; \(F = {[}F_{1}^{T} ,\,\,F_{2}^{T} {]}^{T}\) is the vector of forces/moments on the object exerted by the manipulators at the end-effector; \(J_{B} ({\varvec{q}}) = {\text{blockdiag}}[J_{1} ({\varvec{q}}_{1} ),J_{2} ({\varvec{q}}_{2} ){]}\) represents the Jacobian analytical matrix of the manipulators; \(H({\varvec{q}}) = {\text{blockdiag[}}H_{1} ({\varvec{q}}_{1} ),\,\,H_{2} ({\varvec{q}}_{2} ){]}\), \(H_{i} (q_{i} )\) is the inertia matrix of the ith manipulator \(C({\varvec{q}},\dot{\user2{q}}) = {\text{blockdiag}}[C_{1} ({\varvec{q}}_{1} ,\dot{\user2{q}}_{1} ),\,\,C_{2} ({\varvec{q}}_{2} ,\dot{\user2{q}}_{2} ){]}\) denotes the matrix of Coriolis and centrifugal; \(G({\varvec{q}}) = {[}G_{1}^{T} ({\varvec{q}}_{1} ),\,\,G_{2}^{T} ({\varvec{q}}_{2} ){]}^{T}\) denotes the gravity vector.
The dynamic of the object also can be written in the following form [11]:
where \(H_{z} ,\,\,C_{z} ,\,\,g_{z}\) have the same meaning for the object as Eq. (3); \(F_{z}\) denotes the force/moment vector applied at the center of the object by the two manipulators.
Sum of force/moment applied at the object is expressed through the force and moment at the contact point generated by the manipulators at the end-effector: \(F_{z} = E\,F\), where E is the grasp matrix at the contact point, so:
where \(E^{ + } = E^{T} (E\,E^{T} )^{ - 1}\) is the pseudo-inverse of grasp-matrix E.
3 Fast Terminal Sliding Mode Controller Design
First of all, we define a reference velocity of the object by
where \({{\varvec{\upgamma}}} = diag\left( {\gamma_{1} ,\gamma_{2} ,\gamma_{3} ,\gamma_{4} ,\gamma_{5} ,\gamma_{6} } \right),\)\({{\varvec{\upbeta}}} = diag\left( {\beta_{1} ,\beta_{2} ,\beta_{3} ,\beta_{4} ,\beta_{5} ,\beta_{6} } \right),\)\(m,\,n\,\left( {m > n} \right)\) are positive odd numbers, and \(1 < \frac{m}{n} < 2\). The desired force is generated by an estimated reference model of the object as follows
The reference model of the object is estimated by using RBFNN
where \(\varepsilon_{0}\) is the approximate error, so
The tracking errors are defined \({\varvec{e}}_{p} = \left[ {\begin{array}{*{20}c} {e_{p1} } & {e_{p2} } & {e_{p3} } & {e_{p4} } & {e_{p5} } & {e_{p6} } \\ \end{array} } \right]^{T} = {\varvec{z}}_{d} - {\varvec{z}}\).
The error between actual and reference velocities is given by.
Consider that \({\varvec{s}}_{0} = 0,\) we have:
in which \(k = 1 \div 6.\) Let \(u_{k} \user2{ = }e_{pk}^{\frac{1}{n}}\) then \(e_{pk}^{{}} \user2{ = }u_{k}^{n}\) substitute this into (10) leads to
Divide both sides by \(u_{k}^{m}\) into (11) leads to
Integral of both sides into (12) leads to
Thus,
The desired force applied to the object is updated based on the estimates of the dynamic parameters of the object. The desired force at contact points should satisfy the relation given in (5)
3.1 Design Control Law
Define the reference velocity of the ith robot: \(\dot{q}_{r}\).
The error between actual and reference velocities is given:
The dynamic of the dual-arm robot in Eq. (3), the matrices \(H(q),\,C(q)\), and vector \(G(q)\) contain all the parameters of the manipulators such as length, mass, and moment of inertia v.v. It is difficult to determine exact parameters due to errors in measurement, and environment v.v. Therefore, it is assumed that the components in Eq. (3) are written: \(H(q) = H_{0} (q) + \Delta H(q),\,C(q,\dot{q}) = C_{0} (q,\dot{q}) + \Delta C(q,\dot{q}),\,G(q) = G_{0} (q) + \Delta G(q)\), where \(H_{0} (q),\,C_{0} (q,\dot{q})\) and \(G_{0} (q)\) are nominal values and \(\Delta H(q),\,\Delta C(q,\dot{q})\) and \(\Delta G(q)\) are the component uncertainty of the dynamics model. So The dynamic of the dual-arm robot in Eq. (3) can be rewritten:
where \(f_{0} (q,\dot{q}_{r} ,\ddot{q}_{r} ) = H_{0} \ddot{q}_{r} + C_{0} \dot{q}_{r} + G_{0}\), \(\Delta f(q,\dot{q},\ddot{q}) = \Delta H\,\ddot{q} + \Delta C\,\dot{q} + \Delta G\)
The dynamic uncertainty and disturbances components are estimated using RBFNN.
where \(\varepsilon\) is the error approximation, so \(\hat{D}\) is the estimation of the function \(D\),
So Eq. (17) as:
Now, position control and force control without the measurement of force at contact points is proposed:
3.2 Update Law for NN Weighs
Let an estimated error the dynamics of the object following is then obtained:
substitute Eqs. (8), (9) into (22) as:
The system is considered stable according to the Lyapunov stability principle, the candidate for the Lyapunov function can be selected as
The following lemmas as [11].
Lemma 1
\(A^{T} J_{B}^{T} = E\) and \(A^{T} J_{B}^{T} E^{ + } = I\), where I is the identity matrix.
The time derivative (24) of the Lyapunov function becomes:
Using Eqs. (20) and (23) and the matric \(\dot{H} - 2C\) and \(\dot{H}_{z} - 2C_{z}\) are skew-symmetric, so \({\varvec{s}}^{T} (\dot{H} - 2C){\varvec{s}} = 0\) and \({\varvec{s}}_{0}^{T} (\dot{H}_{z} - 2C_{z} ){\varvec{s}}_{0} = 0\). Using Eqs. (15), (16) and due to properties of matrices \({\varvec{s}}_{0}^{T} A^{T} = (A\,\,{\varvec{s}}_{0} )^{T}\), and using Lemma 1, the derivative of the Lyapunov is determined as follows:
According to the Lyapunov stability principle, the condition for stability of closed dynamics is \(\dot{V} \le 0\) then
and
So, the updated law for the weights of the neural network may have the form:
Now, the derivative of the Lyapunov function is as follows:
If \(K_{2}\) and \(K_{3}\) are selected, \(K_{2} > \left\| \varepsilon \right\|;\,\,K_{3} > \left\| {\varepsilon_{0} } \right\|\) then \(\dot{V} \le 0\).
It is possible to prove that the dynamic system is stable under the control input (21) combined with the updated law (26). According to the Lyapunov stability principle, the system is stable.
4 Simulation Results
In this section, numerical simulation tests are carried out to illustrate the effectiveness of the proposed method. The dual-arm robot is specified, with each arm being a 3-DOF manipulator that works in 2D space to preserve the computational time. The desired position and rotation angle of the object are set out with initial and terminal values as follows:
To ensure smooth motion, the quintic polynomial curve is employed to construct reference trajectories from the initial pose to the terminal pose. Choosing the execution time \(T_{f} = 2.0592\,\left( s \right)\), the desired path is given by:
The parameters for proposed controller are chosen as.
\(K_{s} = diag\left( {\left[ {100,100,100,100,100,100} \right]} \right);{{\varvec{\upgamma}}} = diag\left( {\left[ {300,600,600} \right]} \right);{{\varvec{\upbeta}}} = diag\left( {\left[ {100,100,150} \right]} \right)\) For the RBF system, the number of neurons in hidden layer is 1000, the center and width of Gaussian function are \(linspace\left( { - 2,2,1000} \right)\) and 30 respectively, the adaptive gains are \(\varGamma = 200;\,\,\varGamma_{0} = 200\). Since it is difficult to obtain accurate system parameters, we assume the uncertainty accounts for 30% of total dynamic model. Furthermore, the external noises acting on each arm are presented in Fig. 2. To clearly show the advantages of the proposed method, the comparisons in terms of tracking performance between the FTSMC controller and FTSMC integrated with the RBF neural network are implemented. From a qualitative perspective, Figs. 3 and 4 show the object’s trajectory on the x-axis and y-axis, respectively. The rotation angle of the object is presented in Fig. 5. The blue line, green line, and red dash line indicate the tracking error of the NN-FTSMC, original FTSMC, and the reference path respectively. Although the FTSMC method expresses robustness against disturbances, its performance is still adversely impacted, leading to large errors in tracking trajectories, especially on the x and y axis. On the other hand, with the support of the RBF approximation, the effects of disturbances are compensated and adapted in the control signal. Therefore, the system can ensure both robust and adaptive properties. The tracking errors of the NN-FTSMC are much lesser than the original FTSMC. It can be seen more specific in quantitative results using the root mean square error (RMSE) metrics on tracking errors in x, y-axis, and rotation angle as in Table 1. As compared to the original FTSMC controller, the tracking errors of NN-FTSMC are improved significantly, with 75.7% on the x-axis, 59.01% on the y-axis, and 68.62% in the rotation angle.

External disturbances

The trajectory of the object in x-axis

The trajectory of the object in y-axis

The rotation angle of the object

Total forces and moments acting on the center of the object
The total forces and moments acting on the center of the object are also illustrated in Fig. 6. It can be seen that the sum of the forces and moments applied to the object at the balance position is zero, which means the object is held stable at the balance position. The sign function is substituted by the saturation function to alleviate the chattering phenomenon; hence, the control inputs are applicable in real systems.
5 Conclusion
This paper proposed a robust adaptive controller based on a neural network to control a dual-arm robot manipulator manipulating a rigid object with uncertainties and external disturbances. Since in practice, it is difficult to accurately determine the parameters of the dynamic model of the system, so using two NN algorithms to estimate the model uncertainty of the dual-arm robot, the external disturbance, and the applied force. The stability of the closed-loop control system is proven stable according to the Lyapunov stability theory. The online adaptive learning law is suggested to ensure a stable system by using the Lyapunov principle. The simulation results on Matlab/Simulink have confirmed the stability, robust, fast response, the trajectory of the object convergence with the error to zero, and the guaranteeing object holding stable at the balanced position of the proposed controller.
References
Galicki, M.: Finite-time trajectory tracking control in a task space of robotic manipulators. Automatica 67, 165–170 (2016)
Corradini, M.L., Fossi, V., Giantomassi, A., Ippoliti, G., Longhi, S., Orlando, G.: Minimal resource allocating networks for discrete time sliding mode control of robotic manipulators. IEEE Trans. Industr. Inf. 8(4), 733–745 (2012)
Ren, Y., Chen, Z., Liu, Y., Gu, Y., Jin, M., Liu, H.: Adaptive hybrid position/force control of dual-arm cooperative manipulators with uncertain dynamics and closed-chain kinematics. J. Franklin Inst. 354(17), 7767–7793 (2017)
Jiao, C., Yu, L., Su, X., Wen, Y., Dai, X.: Adaptive hybrid impedance control for dual-arm cooperative manipulation with object uncertainties. Automatica 140, 110232 (2022)
Hacioglu, Y., Arslan, Y.Z., Yagiz, N.: MIMO fuzzy sliding mode controlled dual arm robot in load transportation. J. Franklin Inst. 348(8), 1886–1902 (2011)
Liang, X., Wang, H., Zhang, Y.: Adaptive nonsingular terminal sliding mode control for rehabilitation robots. Comput. Electr. Eng. 99, 107718 (2022)
Wu, X., Huang, Y.: Adaptive fractional-order non-singular terminal sliding mode control based on fuzzy wavelet neural networks for omnidirectional mobile robot manipulator. ISA Trans. 121, 258–267 (2022)
Jouila, A., Nouri, K.: An adaptive robust nonsingular fast terminal sliding mode controller based on wavelet neural network for a 2-DOF robotic arm. J. Franklin Inst. 357(18), 13259–13282 (2020)
Wang, Y., Zhang, X., Zhang, X.: Nonsingular fast terminal sliding mode-based robust adaptive structural reliable position-mooring control with uncertainty estimation. Ocean Eng. 253, 111329 (2022)
Baigzadehnoe, B., Rahmani, Z., Khosravi, A., Rezaie, B.: On position/force tracking control problem of cooperative robot manipulators using adaptive fuzzy backstepping approach. SA Trans. 70, 432–446 (2017)
Panwar, V., Kumar, N., Sukavanam, N., Borm, J.-H.: Adaptive neural controller for cooperative multiple robot manipulator system manipulating a single rigid object. Appl. Soft Comput. 12(1), 216–227 (2012)
Zhai, A., Zhang, H., Wang, J., Lu, G., Li, J., Chen, S.: Adaptive neural synchronized impedance control for cooperative manipulators processing under uncertain environments. Robot. Comput.-Integr. Manuf. 75, 102291 (2022)
Izadbakhsh, A., Nikdel, N., Deylami, A.: Cooperative and robust object handling by multiple manipulators based on the differential equation approximator. ISA Trans. (2021)
Izadbakhsh, A., Nikdel, N.: Robust adaptive control of cooperative multiple manipulators based on the Stancu-Chlodowsky universal approximator. Commun. Nonlinear Sci. Numer. Simul. 111, 106471 (2022)
Zhai, A., Wang, J., Zhang, H., Lu, G., Li, H.: Adaptive robust synchronized control for cooperative robotic manipulators with uncertain base coordinate system. ISA Trans. (2021)
Acknowledgement
Van Trong Dang was funded by Vingroup JSC and supported by the Master, PhD Scholarship Programme of Vingroup Innovation Foundation (VINIF), Institute of Big Data, code VINIF.2021.ThS.26.
This research is funded by the Hanoi University of Science and Technology (HUST) under project number T2022-PC- 003.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Thi, H.L., Dang, V.T., Nguyen, N.T., Le, D.T., Nguyen, T.L. (2023). A Neural Network-Based Fast Terminal Sliding Mode Controller for Dual-Arm Robots. In: Nguyen, D.C., Vu, N.P., Long, B.T., Puta, H., Sattler, KU. (eds) Advances in Engineering Research and Application. ICERA 2022. Lecture Notes in Networks and Systems, vol 602. Springer, Cham. https://doi.org/10.1007/978-3-031-22200-9_5
Download citation
DOI: https://doi.org/10.1007/978-3-031-22200-9_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-22199-6
Online ISBN: 978-3-031-22200-9
eBook Packages: EngineeringEngineering (R0)