
Abstract
Over the last years, researchers are struggling to develop solutions and services for smart and sustainable urban mobility creating dynamic shared spaces for both vehicles and pedestrians. Also, the deployment of autonomous vehicles has boosted the interest in precise, accurate, and robust position, navigation, and timing (PNT). Most of these services will be based primarily on the location of the vehicle relative to other vehicles, objects, and pedestrians in its vicinity. Therefore, the importance of a robust, ubiquitous, and reliable PNT can’t be overlooked. In the mass-market scenario, the challenge will be developing low-cost navigation equipment capable of providing navigation solutions that meet the accuracy, integrity, continuity, and availability requirements. This paper reports some preliminary tests aiming to investigate the phase-ambiguity fixing performance of a commercial precise point positioning real-time kinematic (PPP-RTK) correction service, employing a low-cost receiver. To assess the ambiguity resolution performance, we forced the receiver to restart the ambiguity search generating enough samples for statistic analysis. In this test, PPP-RTK has revealed a promising technique for decimetre-level accuracy positioning with low-cost receivers. Integer ambiguity fixed solutions reveal a DRMS of 0.09 m whereas float solutions reveal a DRMS of 0.45 m. When PPP-RTK corrections are not available, SPP/DGNSS solutions reveal a DRMS of 1.36 m. The test showed that the employment of cost-effective equipment along with the exploitation of correction services allows reaching decimetre/sub-metre accuracy in about 20 s and sub-decimetre accuracy in about 2 min once the integer ambiguity is fixed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
During the last years, climate changes and pandemics have pushed decision-makers to undertake actions to change city paradigms, aiming to create healthy, livable, and sustainable cities. The research community is struggling to develop solutions that tackle last-mile pollution and congestion as well as improve autonomous delivery, active mobility, sustainable logistics, and creating dynamic shared spaces for both vehicles and pedestrians. Smart mobility encourages the integration of innovative solutions and services to accelerate change towards sustainable urban mobility. Also, the deployment of autonomous vehicles has boosted the interest in precise, accurate, and robust position, navigation, and timing (PNT). Autonomous vehicles that are available for a large portion of the population will soon become a reality on road networks. Most of these services will be based primarily on the location of the vehicle relative to other vehicles, objects, and pedestrians in its vicinity. Therefore, the importance of a robust, ubiquitous, and reliable PNT can’t be overlooked. In the mass-market scenario, the challenge will be developing low-cost navigation equipment for land vehicles capable of providing a navigation solution that meets the accuracy, integrity, continuity, and availability requirements [2]. The adoption of high-accuracy positioning within the mass market is also supported by other factors such as the availability of multi-constellation and multi-frequency receivers, the access to raw measurements in Android 7+, the fall in hardware prices, and the deployment of several commercial correction services [1]. Until some years ago, accuracy was a prerogative of high-grade geodetic receivers. Today high accuracy can be achieved also with low-cost receivers thanks to several factors, among all: the increased availability of GNSS interoperable constellations as well as the accessibility to several augmentation techniques both satellite- and ground-based. Given the potential advantage of bringing high accuracy and precision positioning to consumer-grade devices, a new impetus has been given to the study and implementation of these augmentation techniques. GNSS has been the most widely used system for navigation. However, despite its capability to provide absolute navigation information, this system suffers from problems related to signal propagation, especially in urban environments, where buildings, trees, and other structures hinder the reception of GNSS signals [11]. In addition, low-cost receivers can’t assure the required performance if compared to high-grade ones. For these reasons, to employ low-cost receivers for navigation purposes, their performance must be augmented. Then, the increasing demand for high-accuracy and high-integrity navigation solutions can be fulfilled by low-cost GNSS receivers with implemented augmentation techniques. This research aimed to investigate the phase-ambiguity fixing performance of a commercial precise point positioning real-time kinematic (PPP-RTK) correction service, employing a low-cost receiver. Hence, to simulate urban-canyon conditions where GNSS signals can be lost, tests comprehending consecutive shutdowns of the receiver have been carried out. Ambiguity resolution (AR) fixing time and positioning performances have been investigated.
The remainder of this paper is organized as follows: Sect. 2 briefly presents the methodology of PPP-RTK. Section 3 presents the experiment, and Sect. 4 provides results and discussion. Lastly, Sect. 5 draws conclusions and sets future goals.
2 Methodology
The methodology’s development contemplates the experimentation of a low-cost receiver augmented by a PPP-RTK correction service. Aiming to provide robust subdecimetre-level accuracy positioning with a stand-alone low-cost receiver, different GNSS techniques are available, among all: real-time kinematic (RTK), precise point positioning (PPP), and the hybridisation of these (PPP-RTK). The most advanced adaptation of RTK is network RTK (NRTK). It has been the most popular GNSS signal augmentation technology for many industries such as surveying and agriculture and it is particularly prevalent in regions with well-developed Continuously Operating Reference Station (CORS) networks like Europe. NRTK provides near-instant, high-accuracy positioning up to 1 cm +1 ppm [1]. In this technique, each CORS transfers its observations to a control center; the latter calculates systematic effects modeling corrections over the entire serviced area. In this manner, rovers inside the network area connect to a server receiving corrections via a direct bi-directional communication channel. This allows the rover to resolve the ambiguities of the differenced carrier phase data and to estimate the coordinates of its position. The unfeasibility of this technique for the mass-market implementation resides in the non-trivial communication requirements since a bi-directional communication channel is required; thus a large-scale implementation would not be compatible with the actual infrastructure’s capacity. On the other hand, PPP is a global precise positioning service, requiring the availability of precise reference satellite orbit and clock products. It exploits a network of CORS. Combining the precise satellite positions and clocks with a dual-frequency GNSS receiver, PPP minimizes GNSS errors to achieve better accuracy positioning. The corrections are delivered to the user via satellite L-band or through internet protocol (IP), resulting in decimetre-level accuracy with light ground infrastructure requirements. To resolve any local biases, such as the ionosphere and troposphere effects, multipath, and satellite geometry, PPP solutions typically take a period of 5–30 min, mostly for atmospheric error modeling, thus resulting in long AR times [3].
To overcome limitations related to these positioning techniques, the research community is hybridising PPP and RTK obtaining benefits from both technologies [12, 18]. The principles of this hybridization have been described by Teunissen et al. in [13] where the analytical expressions for the variance matrices of the ambiguity-fixed and ambiguity-float PPP-RTK corrections have been illustrated. Subsequently, Khodabandeh et al. in [7] provided an analytical study of the quality of the PPP-RTK corrections as well as their impact on the user AR performance. Khodabandeh in [6] conducted an analytical study showing that the number of satellites and number of frequencies work in tandem to increase the correction latency, yet ensuring successful single-receiver AR. Indeed, PPP-RTK appears to be a promising technique for present and future urban mobility. The concept behind PPP-RTK is to improve PPP estimations by adding the atmospheric delay corrections which are derived from a local reference network; in this manner, the near-instantaneous AR is attainable for rovers inside the network, reducing considerably fixing times [17]. As reported by Wübbena et al. in [16], PPP-RTK exploits a 2D distribution of atmospheric errors created based on the raw measurements of the network of CORS; the quality of this “map” defines the AR capability of the service. Odijk et al. in [8] present and discuss the underlying principles of PPP-RTK demonstrating its GPS-based performance; Wang et al. in [15] tried to achieve rapid centimeter-level positioning for vehicle navigation in urban environments by developing a multi-frequency and multi-GNSS PPP-RTK model. The location-based corrections are most accurate in correspondence to each reference station and degrade as the distance between the rover and the nearest station increases, resulting in longer convergence times [5]. When the rover exceeds the limits of the network, AR is not possible anymore and there is a smooth transition to standard PPP [1]. Therefore, the key factors that make PPP-RTK a highly promising technique for accurate PNT reside in the short convergence times, the smooth degradation to the PPP solution, and the unidirectional data stream broadcast. The performance of a PPP-RTK system is highly dependent on how much data can be provided to the receiver and how fast it can be made available [1]. The quantity and frequency of data that can be delivered to users are limited by the available bandwidth and the data size. These two factors must be well balanced since less quantity of data means a reduction of accuracy and longer convergence times, whilst the reduction of the corrections update rate may introduce latencies that, especially within a high-dynamics application, are not eligible. For this reason, the implementation of 5G infrastructures within European cities is one of the main triggers for the feasibility of the PPP-RTK technique; at this point is well-known that 5G technology ensures transmission speeds previously unreleased as well as the capacity to provide access to a larger number of devices. For such reasons, PPP-RTK can reveal as an appropriate technique for mass-market urban navigation; thus, this paper aims to study how quickly the PPP-RTK technique reaches the positioning performance required by urban mobility applications. The test reported hereinafter has to model appropriately the conditions in an urban environment where satellite signals outage can occur and phase-ambiguity fixing can be lost. Therefore, several shutdowns of the receiver are imposed to investigate time-to-fix and positioning performance both in terms of accuracy and precision.

The location where the experimental data were collected, and the equipment used in the experiment: (a) Topcon PG-A1 antenna, (b) u-blox zed-f9p.
3 Experimental Setup
The present paper shows a preliminary test of the PPP-RTK technique, employing a low-cost receiver. The hardware employed consisted of a low-cost multi-constellation multi-frequency GNSS receiver, namely the u-blox zed-f9p, connected via SubMiniature (SMA) cable to a geodetic antenna (Topcon PG-A1). A geodetic receiver sharing the same antenna was employed for comparison purposes. The test refers to a 2 h GNSS acquisition in the L1/E1, L2, and E5b frequencies. The test site is located in Naples, Italy; this scenario is expected to be a quasi-open-sky and low-multipath environment, as shown in Fig. 1. The correction service exploits the IP network and delivers two types of messages in SPARTN 2.0 format [4]: satellite clock corrections every 5 s and satellite orbits, bias, and atmosphere every 30 s. Given that the reference coordinates are expressed in the ETRF2000 (2008.0), a transformation was performed to consider the relationship of the ETRS89 with the International Terrestrial Reference System (ITRS), allowing the comparison with the PPP-RTK correction service solutions. The results were analysed by exploiting MATLAB® software, developed specifically for this work. The latter extracts some information from the binary u-blox proprietary file, e.g. high-precision positions and solution status, among all. The paper consists of a preliminary study, aiming to investigate the time it takes for AR; 15 consecutive hot starts were imposed and almost every 10 min a new ambiguity set was searched. According to the u-blox integration manual [14], in hot start mode, the receiver simulates a short-time shutdown (4 h or less), so that its ephemerides are still valid. Figure 2 depicts the sky-plot of the survey; a cut-off angle of 15\(^{\circ }\) has been defined and the satellite under the cut-off angle are represented in grey whereas the satellites with an elevation angle bigger than 15\(^{\circ }\) are represented with blue lines. The Figure shows that also satellite E18 from the Galileo constellation has been tracked; according to [10] and [9], this satellite presents a highly eccentric orbit.

Skyplot of the survey. The satellites with an elevation angle equal to or less than 15\(^{\circ }\) are represented with grey lines whereas the satellites with an elevation angle bigger than 15\(^{\circ }\) are represented with blue lines. (Color figure online)
4 Preliminary Results and Discussion
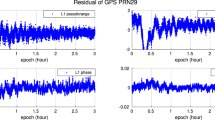
Figures 3, 4 and 5 depict the mean carrier-to-noise density ratio (\(C/N_0\)) comparison between the low-cost and the geodetic receivers for the different GNSS constellations. Since the receivers share the same geodetic antenna, \(C/N_0\) output indicates the accuracy of the tracked satellite observations and the noise density as seen by receivers. It also indicates the level of noise present in the measurements. The lower the signal-to-noise ratio the worse the quality of the measurements. Figure 3 refers to the GPS constellation; the top row shows that on L1 frequency PRN 2, 29, and 32 were tracked only by the geodetic receiver while PRN 10 and 14 were tracked only by the low-cost one; the bottom row, referred to L2 frequency, demonstrates that PRN 6, 29, and 32 were tracked only by the geodetic receiver while PRN 10, 14, and 23 only by the low-cost one. Similarly, Fig. 4 refers to the GLONASS constellation; the top row shows that on L1 frequency only the geodetic receiver tracks PRN 6, 17, and 18 while only the low-cost receiver tracks PRN 22; the same situation is depicted by the bottom row, except for GLONASS satellites that do not provide the second frequency. Moreover, Fig. 5 refers to the Galileo constellation; the top row shows that, on E1 frequency, PRN 2, 8, 11, 12, and 18 were tracked only by the geodetic receiver while PRN 31 and 33 only by the low-cost one; bottom row, referred to E5b frequency, depicts the same behaviour, in terms of satellites tracked by receivers. It can be noted that the second frequencies (bottom panels of previous Figures) acquisitions are characterized by lower \(C/N_0\). According to [14], PPP-RTK correction service supports GPS (L1 C/A, L2P, L2C, L5), GLONASS (L1 C/A, L2 C/A), and Galileo (E1, E5A/B). Therefore, the BeiDou constellation, even if it is tracked by u-blox receivers, is not supported for PPP-RTK corrections, so far.

Mean of \(C/N_0\) values for GPS constellation; comparison between low-cost and geodetic receivers. Blue bars represent the low-cost receiver while red bars represent the geodetic receiver: the top row refers to the GPS L1 band; the bottom row to the GPS L2 band. (Color figure online)

Mean of \(C/N_0\) values for GLONASS constellation; comparison between the low-cost and the geodetic receivers. Blue bars represent the low-cost receiver while red bars refer to the geodetic receiver: the top row refers to the GLONASS L1 band; the bottom row refers to the GLONASS L2 band. (Color figure online)

Mean of \(C/N_0\) values for Galileo constellation; comparison between low-cost and geodetic receivers. Blue bars represent the low-cost receiver, red bars represent the geodetic receiver: the top row refers to the Galileo E1 band; the bottom row refers to the Galileo E5 band. (Color figure online)

Positioning error components of the low-cost receiver over time depending on the solution quality status. The top, the middle, and the bottom panels refer to the North, the East, and the Vertical error components, respectively.
Figure 6 shows the North, the East, and the Vertical error components obtained by the low-cost receiver over time depending on the solution quality status. The top, the middle, and the bottom panels refer to the North, the East, and the Vertical error components, respectively.
In the Figure are shown 15 samples generated for 2 h; each color represents a different solution status (SPP, DGNSS, float, and the fixed RTK): in particular, orange markers represent SPP solutions while yellow markers refer to DGNSS solution; moreover, green color represents float solutions, once fixed solutions were reached the receiver was left running for an extra 5 min interval represented by violet markers. Table 1 reports the time taken by the low-cost receiver either for float and fixed ambiguity estimates after each hot start imposed. Regarding the time to obtain the first ambiguity-float solution, the average is equal to 19 s whereas the shorter is equal to 10 s and the longer to 60 s. Regarding the time to obtain the first ambiguity-fixed solution, the average is equal to 129 s whereas the shorter time is equal to 44 s and the longer one to 457 s. During event 7, the receiver was unable to resolve the integer-ambiguity; therefore, a hot start was imposed after 1413 s. Moreover, during event 8, the fixed status was lost after 38 s without forcing the restart. It is worth noting that these performances were obtained by employing a geodetic antenna, as described in the previous section.
Figure 7 shows the scatter plot of the positioning errors obtained with the low-cost receiver; each color represents a different solution status (SPP/DGNSS, float and fixed RTK). As can be seen from the Figure, the scatter shows exactly what is expected: switching from SPP/DGNSS to RTK float and then RTK fixed, the solutions are gradually less dispersed and more accurate, as confirmed in Table 2.
Indeed, Table 2 depicts the statistics related to the different solution types. Regarding the horizontal components, fixed solutions show a mean position error of 0.08 m with a standard deviation of 0.04 m and a DRMS of 0.09 m; degrading to float solutions the mean position error is equal to 0.39 m with a standard deviation of 0.24 m and a DRMS equal to 0.45 m. Moreover, when PPP-RTK corrections are not applied at all and only SPP/DGNSS solutions are achievable, statistics degrade to a mean position error of 1.11 m with a standard deviation of 0.79 m and a DRMS equal to 1.36 m. Regarding the vertical error statistics, the integer-ambiguity fixed solutions reveal a mean position error of 0.05 m with a standard deviation of 0.13 m and an RMS of 0.14 m. The float solutions vertical error statistics attest to 0.82 m, 0.57 m, and 1.00 m for the mean position error, the standard deviation, and the RMS, respectively. Lastly, when PPP-RTK corrections are not available and SPP/DGNSS solutions are attainable the mean position error is equal to −0.53 m with a standard deviation of 2.04 m and a RMS equal to 2.11 m. As one can notice, integer ambiguity-fixed solutions reveal both high-accuracy and high-precision levels. Considering the statistics reported in Table 2, we can state that the tested system achieves decimetre accuracy in a few seconds; giving some seconds more, the statistics improve, reaching a subdecimetre-level of accuracy once the integer ambiguity is fixed.

Scatter plot of the positioning errors. Each color represents a different solution status: orange refers to SPP/DGNSS solutions, green represents RTK float solutions, and violet refers to RTK fixed solutions. (Color figure online)
5 Conclusions and Future Work
In this paper, PPP-RTK has proved to be a promising technique for decimetre-level positioning performance with low-cost receivers. During the experiment, the time-to-fix has been investigated after consecutive receiver shutdowns. The test showed that the employment of cost-effective equipment along with the exploitation of correction services allows reaching decimetre/sub-metre accuracy in about 20 s and sub-decimetre accuracy in about 2 min once the integer ambiguity is fixed. Results achieved have revealed promising for low-cost urban mobility applications. In detail, as reported in the previous section, integer ambiguity-fixed solutions have revealed a DRMS of 0.09 m whereas the float solution’s DRMS was equal to 0.45 m. When PPP-RTK corrections are not available at all, SPP/DGNSS solutions have revealed a DRMS of 1.36 m. Regarding the vertical error component, integer ambiguity-fixed solutions have revealed an RMS of 0.14 m whereas the float solutions RMS was equal to 1.00 m. Lastly, when PPP-RTK corrections are not available at all, SPP/DGNSS solutions have revealed an RMS of 2.11 m. In the past, this level of near-instantaneous accuracy was a prerogative of high-grade receivers; nowadays, thanks to the deployment of ground- and satellite-based correction services, phase measurements can be exploited for precise positioning with low-cost equipment.
References
PPP-RTK market and technology report. European Global Navigation Satellite Systems Agency (1) (2019)
Ben Afia, A., Escher, A.C., Macabiau, C.: A low-cost GNSS/IMU/Visual monoSLAM/WSS integration based on Federated Kalman Filtering for navigation in urban environments. In: ION GNSS+ 2015, 28th International Technical Meeting of the Satellite Division of The Institute of Navigation, pp. 618–628. ION GNSS 2015, ION, ION, Tampa, FL, United States, September 2015. https://hal-enac.archives-ouvertes.fr/hal-01284973
Cai, C., Gao, Y.: Precise point positioning using combined GPS and GLONASS observations. J. Global Position. Syst. 6, 13–22 (2007). https://doi.org/10.5081/jgps.6.1.13
Ferguson, K., Urquhart, L., Leandro, R.: SPARTN: the first open GNSS data standard that enables safe and accurate GNSS localization for automotive applications. In: Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), pp. 2092–2106 (2020)
Gokdaş, O., Ozlüdemir, M.T.: A variance model in NRTK-based geodetic positioning as a function of baseline length. Geosciences 10(7), 262 (2020). https://doi.org/10.3390/geosciences10070262, https://www.mdpi.com/2076-3263/10/7/262
Khodabandeh, A.: Single-station PPP-RTK: correction latency and ambiguity resolution performance. J. Geodesy 95(4), 1–24 (2021)
Khodabandeh, A., Teunissen, P.: An analytical study of PPP-RTK corrections: precision, correlation and user-impact. J. Geodesy 89(11), 1109–1132 (2015)
Odijk, D., et al.: PPP-RTK by means of s-system theory: Australian network and user demonstration. J. Spatial Sci. 62(1), 3–27 (2017). https://doi.org/10.1080/14498596.2016.1261373
Robustelli, U., Benassai, G., Pugliano, G.: Signal in space error and ephemeris validity time evaluation of Milena and Doresa Galileo satellites. Sensors 19(8), 1786 (2019). https://doi.org/10.3390/s19081786, http://www.mdpi.com/1424-8220/19/8/1786
Robustelli, U., Pugliano, G.: Galileo single point positioning assessment including FOC satellites in eccentric orbits. Remote Sens. 11(13), 1555 (2019). https://doi.org/10.3390/rs11131555
Robustelli, U., Cutugno, M., Pugliano, G.: Positioning domain assessment of multi constellation dual frequency lowcost receivers in an highly degraded scenario. In: Parente, C., Troisi, S., Vettore, A. (eds.) R3GEO 2019. CCIS, vol. 1246, pp. 3–15. Springer, Cham (2020). https://doi.org/10.1007/978-3-030-62800-0_1
Teunissen, P., Odijk, D., Zhang, B.: PPP-RTK: results of CORS network-based PPP with integer ambiguity resolution. J. Aeronaut. Astronaut. Aviat. Ser. A 42, 223–230 (2010)
Teunissen, P., Khodabandeh, A.: Review and principles of PPP-RTK methods. J. Geodesy 89(3), 217–240 (2015)
U-blox: U-blox website. https://www.u-blox.com/en. Accessed 8 Mar 2022
Wang, B., et al.: Multi-frequency and Multi-GNSS PPP-RTK for vehicle navigation in urban environments. In: EGU General Assembly Conference Abstracts, pp. EGU21-9039 (2021)
Wübbena, G., Bagge, A., Schmitz, M.: Network based techniques for RTK applications. In: Proceedings of GPS Symposium, GPS JIN 2001, pp. 14–16, November 2001
Wübbena, G., Schmitz, M., Bagge, A.: PPP-RTK: precise point positioning using state-space representation in RTK networks. In: Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), pp. 2584–2594, September 2005
Zhang, B., Teunissen, P., Odijk, D.: A novel un-differenced PPP-RTK concept. J. Navig. 64, S180–S191 (2011). https://doi.org/10.1017/S0373463311000361
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Cutugno, M., Robustelli, U., Pugliano, G. (2022). Low-Cost Hardware PPP-RTK AR Time-to-Fix and Positioning Performance Assessment: A Preliminary Static Test. In: Borgogno-Mondino, E., Zamperlin, P. (eds) Geomatics for Green and Digital Transition. ASITA 2022. Communications in Computer and Information Science, vol 1651. Springer, Cham. https://doi.org/10.1007/978-3-031-17439-1_3
Download citation
DOI: https://doi.org/10.1007/978-3-031-17439-1_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-17438-4
Online ISBN: 978-3-031-17439-1
eBook Packages: Computer ScienceComputer Science (R0)