
Abstract
This paper is concerned with the problem of ensuring both the first eigenfrequency of the a two-support beam and its first critical force by determining the required stiffness of supports. This is a quite complex mathematical problem and well-known scientific literature usually offers a solution only in graphic or tabular form. One of the main problems is the highly nonlinear dependence of results on supports stiffness at free vibrations and stability loss. In the paper, these difficulties are overcome by approximation of nonlinear dependencies using the least-squares method and getting analytical quadratic approximating functions instead. As a result, we get a closed-form solution for the problem in the form of a fourth-degree resolving equation that has an analytical solution. This solution allows determining support stiffness which provides the first eigenfrequency of a two-support beam and its first critical force. Replacing the strongly nonlinear dependencies with simpler quadratic functions, however, adversely affected the calculation error which can reach 10%. To reduce this error, it is recommended that the stiffness of both supports be equal or of the same order.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Euler-Bernoulli beam
- Elastic supports
- Free vibrations
- Buckling
- First eigenfrequency
- Axial force
- Analytical solution
1 Introduction
There are many beam structures subject to forced vibration along with compressive axial force. In this case, these structures have to provide the values of the first eigenfrequency and the first critical force. These conditions can be written as:
where [f] and [P] are the allowable frequency and force values, respectively.
The dynamic behavior of the Euler-Bernoulli beam is governed by two 4th-order differential equations with specified boundary conditions, which reflect beam support features. Simple support conditions, like a hinge, fixed-ended, and their combinations, lead to trivial solutions of the governing equations that can be found in the numerous scientific literature and dynamics guides [1,2,3,4]. In fact, the real supports have some finite stiffness, which affects both the value of the first vibration frequency and the first critical force.
Taking into account the finite stiffness of the supports complicates the solution since it has a form of the transcendent equation without an explicit analytical solution. In dynamic, different types of support are taken into account in the form of so-called support coefficients, which are obtained from the numerical solution of governing equations. In simple cases of fixation, when the support stiffness is zero or infinity, the values of these coefficients are given in the scientific literature. Finite support stiffness with corresponding values of support coefficients usually are presented in the literature in the form of graphs or tables on the base of their separate values. This method of representation is less convenient in calculations than analytical expressions, since the required stiffness value usually does not coincide with the presented data.
This paper proposes a method of solution for the governing equations through approximation of these nonlinear dependencies using the least-squares method and getting analytical quadratic functions. As a result of which we can solve reverse problems for the determination of the required supports stiffness, which provides both values of the first eigenfrequency and critical force for a two-support beam.
2 Methods
Let’s consider the mathematical description of the free vibration and stability problem for an Euler-Bernoulli beam on elastic supports and get the fundamental equations.
2.1 Governing Equations
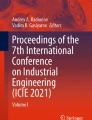
Let us consider a straight beam fixed in hinged supports with some stiffness k1, k2 and exposed to external action in the form of axial force P and uniform temperature ΔT (Fig. 1). The dynamic behavior of the beam is evaluated by the first eigenfrequency of bending vibrations and the first critical force.

Beam with elastic supports.
The equation of free vibration of the beam taking into account the action of the compressive axial force P has the form [1,2,3,4]:
where y = y(x, t) is the deflection function; E is the elastic modulus; Jmin is the minimum moment of inertia of cross section; m is the unit weight, m = ρS, ρ is the density; S is the cross-sectional area; P is the axial force.
If axial force P reaches a certain critical value, it can lead to a beam buckling. The stability equation has the form [5,6,7,8,9,10,11,12,13,14,15,16]:
The solution of the Eq. (2) for the first eigenfrequency at P = 0 has the form:
where α is the support coefficient at vibrations, which reflects support stiffness.
The first critical force can be found from Eq. (3) in the form:
where μ is the support coefficient at beam buckling or the so-called column effective length factor, which also determined by the beam supports.
With the simultaneous action of axial force and free vibration, the obtained solutions (4, 5) are connected to each other by Galef’s formula [16]:

where
 is the first eigenfrequency under action of axial force P; f1(P = 0) is the first eigenfrequency in absence of axial force P; Pcr1 is the first critical force.
is the first eigenfrequency under action of axial force P; f1(P = 0) is the first eigenfrequency in absence of axial force P; Pcr1 is the first critical force.
Let’s decompose the axial force P into two components according to the principle of superposition:
where PΔT is the axial force from temperature change; PF is the external force action; αt is the coefficient of thermal expansion.
Substituting (4, 5, 7) in Eq. (6) gives the equation for the first eigenfrequency, taking into account temperature and force effects, as well as the method of fixation in the form of:

Values of support coefficients α and μ for common cases of supports can be found in dynamics guides [17,18,19] or calculated from governing equations solution (2, 3). However, existing reference books offer a small number of these coefficients for simple types of beam supports, which have zero or infinity stiffness.
2.2 Functions of Support Coefficients
Consider the case of the stiffness of the supports k1, k2 between zero and infinity, then we get that the coefficients of the supports will be some functions of their stiffness (Fig. 1):
Express the support coefficients through the relative stiffness Ci:
Then we get new functions:
Functions (11) are strongly non-linear and cannot be expressed by simple analytical dependences; this is a reason that in the reference literature they are presented in tabular or graphical form only. In our previous papers [20, 21] analytical functions (11) were obtained for three ranges of stiffness C1, C2.
3 Determination of Required Support Stiffness
3.1 Governing Equation
Let’s express Eq. (9) in a condition form:
Next, we rewrite an Eq. (12) in abbreviated form:
where
The solution of Eq. (13) regarding the stiffnesses of Ci requires not the functions (11) themselves, but their 2nd and 4th degrees, which we denote as µ2 and α4, respectively. We get these new functions in a few steps. Firstly, we calculated two sets of initial data from the obtained functions (11) for the stiffness range C = 0…1000. Then we increase the values in the data sets till the required power. Finally, we approximate the new dataset using the least squares method and check the quadratic functions as
The calculated coefficient values in the functions (15, 16) are given in Table 1.
Equation (13) takes the form:
The solution of Eq. (17) has the uncertainty in the form of an infinite number of C1 and C2 combinations, which satisfy a problem. To eliminate this uncertainty, we take C2 = n⋅C1⋅ then instead of (15, 16) we get:
For the short, we enter new coefficients:
Then Eq. (17) takes the form:
Let’s rewrite:
Finally, we get the 4th degree governing equation in the form:
or
This algebraic equation of the 4th degree (31) determines the required value of the support stiffness, which is one of its 4 roots. Graphically, this solution can be shown as one of the intersection points of two 4th degree curves.
3.2 Analytical Solution of the Governing Equation
The 4th degree is the highest order of algebraic equation for which analytical solution exists [22]. The 4th degree equation has several analytical methods of solution. In this paper, we use method developed by Nesmeev that presented in his papers [22, 23]. To do so, let’s transform Eq. (31) so that the coefficient at the highest degree becomes equal to one:
where
Next, we find the coefficients of the auxiliary cubic equation:
Solution of the auxiliary cubic equation in canonical form requires finding its coefficients:
Check of the coefficient number signs (29) shows that for the considered range of support stiffness we get p < 0, q > 0, k < 0. In this case, characteristic angle φ can be defined as:
From the three roots of the auxiliary cubic equation, the maximum root is correct only. This root can be found from the equation:
Next solution involves two square equations. Let’s find the auxiliary coefficients for the square equations:
The first square equation has a form:
where
Its real root is:
Similarly, we solve the second square equation:
where
Its real root is:
The required support stiffness is the smallest of the previously found real roots:
Finally, the beam support stiffness can be defined as:
Calculated support stiffness (41) provides the required value of the beam first eigenfrequency at the specified temperature or axial force.
4 Discussion
Here, the solution of this problem is reduced to an algebraic equation of the fourth-order (24) or (25). The solution of this governing equation can be graphically represented as the intersection of two approximating quadratic functions (Fig. 2). Intersection point determines required stiffness of supports C1 (40).

Graphical interpretation of the solution.
The error of the stiffness calculation depends mainly on the accuracy of the approximate functions (18, 19). It is quite difficult to provide high accuracy by using quadratic functions (18, 19), since the original curves (11) are highly non-linear. In this paper, the reasonable accuracy is achieved by dividing the full stiffness range into sub-bands, in the same way as it was done in [20, 21]. Comparative calculations showed that acceptable accuracy of calculation, up to 10%, is achieved with the support stiffness of one order; otherwise, error can greatly increase.
5 Conclusion
In this paper, we proposed the solution for the problem of determining the required stiffness of the beam supports, which provide specified values of the first eigenfrequency and first critical force. The least-squares method allowed to approximate the non-linear dependencies by quadratic functions and made it possible to deduce the problem to the fourth-order algebraic equation. We used analytical method to solve the fourth-order equation and got calculation error less 10%, which is quite acceptable for engineering calculations as the first approximation.
References
Benaroya, H., Nagurka, M., Han, S.: Mechanical Vibration. CRC Press, Taylor & Francis Group, Boca Raton (2017)
Kelly, S.G.: Mechanical Vibrations. Theory and applications. Cengage Learning, Boston (2012)
Rao, S.: Mechanical Vibrations. Pearson Education Limited, London (2018)
Shabana, A.S.: Theory of Vibration. Springer, New York (2019). https://doi.org/10.1007/978-3-319-94271-1
Kudryavtsev, I.V., Brungardt, M.V., Troshin, S.I., et al.: Temperature influence on dynamic behavior of spacecraft waveguides. In: IOP Conference Series: Materials Science and Engineering, vol. 862, p. 022041 (2020). https://doi.org/10.1088/1757-899X/862/2/022041
Bokaian, A.: Natural frequencies of beams under compressive axial loads. J. Sound Vib. 126(1), 49–65 (1988). https://doi.org/10.1016/0022-460X(88)90397-5
Bokaian, A.: Natural frequencies of beams under tensile axial loads. J. Sound Vib. 142(3), 481–498 (1990). https://doi.org/10.1016/0022-460X(90)90663-K
Pilkington, D.F., Carr, J.B.: Vibration of beams subjected to end and axially distributed loading. J. Mech. Eng. Sci. 12(1), 70–72 (1970)
Son, J.H., Kwak, B.M.: Optimization of boundary conditions for maximum fundamental frequency of vibrating structures. AIAA J. 31(12), 2351–2357 (1993). https://doi.org/10.2514/3.11935
Wang, C.Y.: Minimum stiffness of an internal elastic support to maximize the fundamental frequency of a vibrating beam. J. Sound Vib. 259(1), 229–232 (2003). https://doi.org/10.1006/jsvi.2002.5100
Bojczuk, D., Rebosz-Kurdek, A.: Optimal design of bar structures with their supports in problems of stability and free vibrations. J. Theor. Appl. Mech. 52(2), 533–546 (2014)
Seshu, P., Dhuri, K.D.: Corrected formulas for natural frequencies of cantilever beams under uniform axial tension. AIAA J. 45(6), 1435–1438 (2007). https://doi.org/10.2514/1.28937
Han, S.M., Benaroya, H., Wei, T.: Dynamics of transversely vibrating beams using four engineering theories. J. Sound Vib. 225(5), 935–988 (1999). https://doi.org/10.1006/jsvi.1999.2257
Stephen, N.G.: Beam vibration under compressive axial load-upper and lower bound approximation. J. Sound Vib. 131(2), 345–350 (1989). https://doi.org/10.1016/0022-460X(89)90498-7
Valle, J., Fernández, D., Madrenas, J.: Closed-form equation for natural frequencies of beams under full range of axial loads modeled with a spring-mass system. Int. J. Mech. Sci. 153, 380–390 (2019). https://doi.org/10.1016/j.ijmecsci.2019.02.014
Galef, A.E.: Bending frequencies of compressed beams. J. Acoust. Soc. Am. 44(2), 643 (1968). https://doi.org/10.1121/1.1911144
Biedermann, V.L.: Applied Theory of Mechanical Vibrations. M.VSH, Moscow (1980)
Umanskiy, A.A.: Spravochnik Proektirovshika, vol. 2. Stroiizdat, Moscow (1973)
Blevins, R.D.: Formulas for Dynamics, Acoustics and Vibration. Wiley, Hoboken (2016)
Mityaev, A., Kudryavtsev, I., Khomutov, M., et al.: Mutual influence of the supports stiffness and the first natural frequency at bending vibrations of a spring-hinged beam. In: IOP Conference Series: Materials Science and Engineering, vol. 1155, p. 012099 (2021). https://doi.org/10.1088/1757-899X/1155/1/012099
Kudryavtsev, I., Khomutov, M., Troshin, S., et al.: Influence of support stiffness on first critical force of spring-hinged beam. In: Kovalev, I. (ed.) Proceedings of IV International Conference on Advanced Technologies in Aerospace, Mechanical and Automation Engineering (MIST: Aerospace–IV), Krasnoyarsk, 10–11 December 2021 (2021)
Nesmeev, Yu.A.: An approach to solution of algebraic equations of the third and fourth degrees. Tomsk State Univ. J. Math. Mech. 1(13), 26–30 (2011)
Nesmeev, Yu.A.: The development of an approach for the solution of the fourth degree algebraic equation. Tomsk State Univ. J. Math. Mech. 4(24), 29–38 (2013)
Acknowledgements
Research was funded by RFBR, Krasnoyarsk Territory and Krasnoyarsk Regional Fund of Science, project number 20-48-242922.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Kudryavtsev, I.V., Brungardt, M.V., Khomutov, M.P., Rabetskaya, O.I., Mityaev, A.E. (2023). Analytical Calculation of Beam Supports Stiffness to Provide the First Eigenfrequency and Critical Load. In: Radionov, A.A., Gasiyarov, V.R. (eds) Proceedings of the 8th International Conference on Industrial Engineering. ICIE 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-14125-6_44
Download citation
DOI: https://doi.org/10.1007/978-3-031-14125-6_44
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-14124-9
Online ISBN: 978-3-031-14125-6
eBook Packages: EngineeringEngineering (R0)