
Abstract
Surface Electromyography (sEMG) or EMG contains a large amount of information about human kinematics and kinetics, and has been applied in different working environments. Devices like exoskeletons, smart bracelet performs better with information from EMG introduced into the system. For example, some rehabilitation exoskeletons designed for subjects suffered from nerve injuries are controlled under the strategy called “assist-as-needed”. In these studies, various methods, especially machine learning, have been used to establish a large number of nonlinear relationships between EMG and kinematics, as well as kinetics. However, some conditions that have not been studied before but occur in the system will lead to errors in the overall response of the control system. In this paper, human muscle tissue is regarded as a device with input and output responses, the relationship between the least squares slope of AEMG (Averaged EMG) and the current change in muscle contraction torque \(\Delta T\) is studied when the torque generated by muscle contraction is \(T\), the joint angle is \(\theta \), and the joint movement angular velocity is \(\omega \). The established relationship provides a potential closed-loop EMG control pathway from human to machine for human-machine interaction devices.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Surface electromyography (sEMG) or EMG is a technique concerned with the recording and analysis of myoelectric signals and is an essential element in human-robot collaboration systems, as well as human-machine interfaces. It’s influenced by physiological variations in the state of muscle fiber membranes [1]. At present, a variety of EMG control equipment has been developed, such as: exoskeleton based on EMG control, EMG control bracelet (the company has been acquired by Google) and so on [2]. Especially exoskeleton, since the appearance of the concept, relative control methods have always been an extremely important part. From the initial control method by increasing the closed loop system sensitivity [3] to EMG based control [2], EEG based control [4] and even EMG-EEG based control, in this process, the human-machine cooperation performance or human-machine coupling of the exoskeleton has been greatly improved. But there is still considerable room for the improvement of human-machine collaboration.
In 2003, Kazuo Kiguchi et al. proposed a neuro-fuzzy controller [5]. Then in 2008, they [6] applied the proposed neuro-fuzzy controllers to a 3-DOF upper limb assist device, among which each neuro-fuzzy controller was established based on experiment results in advance. The relationship between EMG and torque generated by human arm changes a lot at different joint positions, so it’s established according to joint position. In 2012, the neuro-fuzz controller in the original scheme [7] was improved considering the different joint positions and was applied into a 7-DOF upper limb power-assist exoskeleton. In this scheme, the EMG control part first takes the exoskeleton joint angle and predetermined 16-channel EMG signals as input. Among it, the joint angle determines the selection of the neuro-fuzzy matrix, so that the formula for estimating the joint torque through the EMG signals corresponds to the changes in the joint angle, which leads to the difference in anatomical muscle output properties. This is because that under different motion postures, the joint angle positions are different, and the same muscle has different effects even though with the same activation degree. Finally, use the dynamic formula to calculate the torque required by each joint motor. In the way mentioned above, the human-machine cooperation is implemented.
In 2018, Tatsuya Teramae, etc. proposed an EMG-based optimal control framework for a new type of rehabilitation exoskeleton by AAN (Assist-As-Needed) control strategy based on model prediction control (MPC) method. This framework is established under a linear torque estimation model proposed by Kazuo Kiguchi, etc. in 2012 [8]. In 2019, Zhang Lei, etc. [9] mapped the EMG signals with respect to the joint angles by a non-linear relationship so as to estimate the movement of upper limb. The control methods mentioned above established the relationship between EMG signal and human muscle torque output or joint angel velocity by means of machine learning, but the influence of power-assist disturbances on EMG signal has not yet been considered for the time being. Related research has attracted a group of researchers. Similar researches are [10, 11].
Jacob A. George et al. [12] tried to solve this problem by means of data-driven. They first set 5 assist levels, 8-channel EMG signals from each leg and the hip joint torque generated by the exoskeleton system were acquired under various assist levels in the experiment. Then relationship between the EMG signals and the torque generated by the human body under different assist levels is established through the KF and CNN convolutional neural networks. Through the analysis of the collected data, researchers came to several qualitative conclusions, including the degree of influence of exoskeleton assist changes on EMG signals and kinetics, as well as several methods of training nonlinear mapping models by machine learning methods.
This paper contains two parts, firstly it solves the problem mentioned above in a brand new approach. In the experiment, the simple movement of elbow flexion and extension is selected, and different torque deficits \(\Delta T\) (torque that is needed to implement determined movement of human-machine system but not satisfied), angular velocity of the joint rotation \(\omega \), joint angle \(\theta \) when the torque \(T\) provided by the human body changes and \(T\) are realized through a specially designed experimental device. Then relationship between the least squares slope of the EMG signal smoothed by a time window of 100 ms was explored, the result was called the muscle biomechatronics response equation.
2 Experiment
2.1 Objects
One subject (one male, age: 27) without any known neural or muscular disorders were recruited in this study. No strenuous activity in the past week, no muscle soreness, discomfort and other symptoms.
2.2 Experimental Equipment
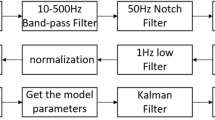
In the experiment, the Cometa PicoEMG surface EMG acquisition system (the sampling frequency is 2000 Hz) was used to acquire the original EMG signals of the targeted muscle (raw EMG signals were first filtered using 20–250 Hz butterworth bandpass filter, then remove baseline offsets of the output, as well as the acceleration signal, acting as an action trigger.
In order to simulate the change of external resistance torque, a simulation device is specially designed, as shown in Fig. 1(a). A weight that simulates the change of external resistance torque is connected to a small steel frame by a rope as a load with an acceleration trigger pasted on it as shown in Fig. 1(b).

(a) External resistance change simulation device. With the help of it, sudden change of external resistance change could be simulated precisely. (b) The weight of external resistance change simulation device and the acceleration sensor attached to it. (c) The spring used to trigger the weight when external resistance change is 0 N.m.
2.3 Preparation
Firstly, explain the experiment action to the subjects. In particular, the subjects should pay attention to following the beats to move the hand-held weight to a predetermined position during the experiment, rather than paying attention to the force generated by the muscles. This is to make the action in the experiment closer to the typical actions in daily life, such as grasping objects. These routines focus more on the end position rather than muscle contraction as in body building. In this way, the experiments performed are more consistent with that in daily life.
Then place the electrodes. Use a blade to remove the surface body hair, and then use a non-woven fabric dipped in 75% medical alcohol to wipe the skin where the EMG electrodes would be placed to ensure that the dirt affects signal acquisition is removed. Electrodes are supposed to be placed at the peak position of the short head of the biceps in flexion and the triceps.

Electrodes and sticking positions. There are 3 electrodes pasted on the arm.
Since this experiment used a single experimenter as the experimental object, MVC (Maximum Voluntary Contraction) was not performed. A metronome was used in the experiment to make it easy for the experimenter to control the angular velocity of his arm movement. The metronome was set to 200 bpm, see below for a more specific introduction.
2.4 Target Muscle Selection
Throughout the experiment, the elbow flexion-extension freedom was concerned only. Muscles related to elbow flexion-extension include biceps brachii, triceps brachii. Although the triceps brachii is not the main part, it plays an auxiliary role to guarantee stability. See Fig. 2 for electrodes and sticking positions. In fact, only EMG of biceps brachii is analyzed.
2.5 Variable Settings
During the rotation of elbow at a constant angular velocity (the angular velocity is constant, see the introduction in the following section for specific implementation), the parameters that can be controlled are:
-
1.
The size of the torque deficit \(\Delta T\)
It is a positive value when the joint torque provided by the muscles related to the elbow joint is increased (simulating a decrease in the external assist torque), and a negative value otherwise.
-
2.
Elbow rotation angular velocity \(\omega \)
-
3.
Position of power assist change \(\theta \)
That is, the angle of the joint when the power assist changes.
-
4.
Human muscle contraction torque \(T\) at the moment before the torque changes
Under different contraction torques \(T\), the muscle biomechatronics response equation may be different.
In this experiment, ω = 1.745 rad/s, and the subjects were required to complete 120° of elbow joint movement in 4 time intervals under the rhythm at 200 bpm. In this way, the angular velocity was controlled to be constant: \(\theta \) = 90°, at which position the upper arm is vertically downward, the forearm is horizontal; \(T\) = 19.6 N × moment arm A (holding a 2 kg weight), the assist change is set to 4.9 N × A, 9.8 N × A, 14.7 N × A, 19.6 N × A (add 0.5 kg weight each time). The value of A is set according to the length of forearm of the experimenter.
2.6 Experiment Procedure
According to 4 different levels of torque deficit, the experiment is divided into 5 similar parts, in which the initial load is 19.6N (2 kg), and the torque deficits are 0 N × A, 4.9 N × A, 9.8 N × A, 14.7 N × A and 19.6 N × A. In each group, the same movement is repeated 8 times. In order to reduce the effect of fatigue, there is a 10-min time interval between two groups. In the power-assist-unchanged group, a light spring, as shown in Fig. 1(c), was held by the subject’s hand to trigger the weight and the pasted acceleration sensor when θ = 90°. The use of a spring not only ensures the effective triggering of the weights, but also makes sure not to affect the subsequent joint movement when θ is 90°–120° in the same assist group, because the spring can be deformed.
In each group, the subject first faces the external resistance change simulation device, flex the elbow to 90° and the forearm should be level with the ground, then adjust the standing position and the height of weight until the weight just contact the palm. Thirdly, instructed by the metronome, start the movement after the initial beat, and then make sure the elbow has rotated to 30°, 60°, 90° and 120° when the next 4 beats are played. At the moment when contact with the weight, the subject should maintain the original angular velocity as much as possible. Finally, fully relax the arm, reset the position of weights and repeat the whole process 7 times.
3 Data Analysis
3.1 Pre-processing
During the experiment, a total of 40 (5 × 8) sets of motion data were collected. When analyzing, first select an appropriate threshold to judge the trigger point. Subsequently, the data were smoothed using full-wave rectification and averaged over a period of 100 ms [1] (moving average on a sample by sample basis of the past 100 ms).
N denotes the number of points selected to calculate AEMG of the EMG discrete time series.
8 discrete time series were extracted from the collected data in each group. The trigger point is manually set at 3 s, and each one extracted last 4 s. Finally, we get 40 of them.
3.2 The Differential
The motion of the human body is not as consistent as the motion of mechanism. Identical as the two motion processes are, there will be large or small differences in the preprocessed EMG signals. In the process of the experiment, in order to explore the impact of power-assist change (or torque deficit) on EMG, the experimental data of the power-assist-unchanged group and the power-assist-changed group are both needed. But “how to judge if one of the 8 data is useful for data analysis and which two data are supposed to be put together” turns out to be a problem that needs to be solved in the study of the muscle biomechatronics response equation.
For example, there are 8 data in the power-assist-unchanged group, and the same number as in the power-assist-changed group when T = 4.9 N × A. EMG signals in the first 3 s in these two data sets corresponds to the same action, that is, the subject does a curl at ω = 1.745 rad/s holding a 19.6 N weight. After 3 s, the power-assist changed in power-assist-changed group, but the subjects still maintained the same movement speed. Due to the randomness of EMG signals generated by human movement, we choose to analyze the difference between the EMG signals in the two data groups within 0–3 s, treat the two data with the smallest difference as exactly collected from the same action and analysis them. That’s to avoid the influence by arbitrariness of EMG signals. To this end, a degree of difference calculation method is proposed.
Firstly, trend analysis of the EMG signals filtered by 100 ms average filtering is carried out, then a proper threshold is set manually to detect the first obvious higher value of the EMG signals, shown as the green and red solid dot in Fig. 3. Secondly one of the two data sets is used as benchmark to scale the other data set so that the size of contracted discrete time series values between the threshold point and the trigger point is the same. The solid green line representing the scaled part is the same size as the red one, while the dashed green line representing the part before scaling is larger. Finally, calculate the difference (referenced from the definition of error energy in signal correlation).
N is the total number of discrete time series values from the threshold point to the trigger point after scaling, \({a}_{i}\) and \({b}_{i}\) are all discrete time series values from the threshold point to the trigger point in the power-assist-unchanged group and the power-assist-changed group respectively.

A data set pair with a lower degree of difference. Among them, the yellow part and the magenta part are power-assist-unchanged group and power-assist-changed group (\(\Delta T\) = 9.8 N \(\times \) A) respectively, the red part and the green part represent the data after being scaled respectively. The green part is scaled with the red part as the scaling reference, and the green dot is the threshold point of the scaling, so it is with the red dot. (Color figure online)
3.3 Linear Fitting
Currently, no one has been engaged in research in this direction as far as know. After trying several features, it is found that selecting 40 ms AEMG after the trigger point and using the least squares method to perform linear fitting produces a better law. It is worth noting that, in order to simulate a real-time system, all AEMG time windows are within the time range from a period of time ago to the current moment. The specific process is as follows.
Firstly, values of difference of each two data groups collected are calculated in pairs, and the slope K after the least squares fitting of the data pairs with the lowest 3 values is selected, then the average value of them is taken as shown in Table 1.
As depicted in Fig. 4, under four power-assist-change levels, the average values of the slopes are K = −74.3, −26.3, 24.0,147.1 (mv/s), and K is roughly linear with power-assist change. When the power-assist change position of the elbow is 90°, the Human muscle contraction torque is 6.468 N·m (19.6 N × A, A = 0.33 m) and the angular velocity is 1.745 rad/s, the EMG signal smoothed by 100ms time window, the functional relationship between the least squares slope and the power-assist change within 40 ms after the assist level changes is roughly as follows:

The muscle biomechatronics response equation get at ω = 1.745 rad/s, θ = 90°, T = 6.46 N.m.
4 Conclusion
This paper preliminarily studies the relationship between the EMG signal feature and the change of muscle torque output under specific joint motion speed, specific muscle torque output and specific joint angle, and the muscle biomechatronics response equation under specific conditions is obtained. The established relationship would be subsequently used to improve the existing control methods of human-machine interaction equipment, to realize “Man-in-loop” better and to achieve a better human-machine interaction/human-machine collaboration performance. Due to the randomness of human motion, final correction torque calculated by this equation may not be completely accurate in value, but it can better improve the compliance in the process of human-computer interaction. Our team will conduct more in-depth research on the application of this equation and more experiments to improve the generalization performance of the equation, which would reveal the muscle biomechatronics response equation of different individuals under different joint motion speeds, different muscle torque outputs as well as different joint angles. In addition, the application of this equation relies on the detection of power-assist changes, so methods to detect sudden changes in muscle output is also worthy of further study. In conclusion, it is foreseeable that this equation would play a role in a wider range of human-machine interaction.
References
Konrad, P.: The ABC of EMG A Practical Introduction to Kinesiological Electromyography. Version 1.4 (2006). Noraxon INC [Элeктpoнный pecypc]. http://www.noraxon.com/docs/education/abc-of-emg.pdf
Bi, L., Guan, C.: A review on EMG-based motor intention prediction of continuous human upper limb motion for human-robot collaboration. Biomed. Signal Process. Control 51, 113–127 (2019)
Kazerooni, H., et al.: On the control of the Berkeley lower extremity exoskeleton (BLEEX). In: Leal, J., Scheding, S., Dissanayake, G. (eds.) Proceedings of the 2005 IEEE International Conference on Robotics and Automation, vols. 1–4, pp. 4353–4360. IEEE (2005)
Meng, J., et al.: Noninvasive electroencephalogram based control of a robotic arm for reach and grasp tasks. Sci. Rep. 6(1), 1–15 (2016)
Kiguchi, K., Tanaka, T., Fukuda, T.: Neuro-fuzzy control of a robotic exoskeleton with EMG signals. IEEE Trans. Fuzzy Syst. 12(4), 481–490 (2004)
Kiguchi, K., et al.: Development of a 3DOF mobile exoskeleton robot for human upper-limb motion assist. Rob. Auton. Syst. 56(8), 678–691 (2008)
Kiguchi, K., Hayashi, Y.: An EMG-based control for an upper-limb power-assist exoskeleton robot. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 42(4), 1064–1071 (2012)
Teramae, T., Noda, T., Morimoto, J.: EMG-based model predictive control for physical human–robot interaction: application for assist-as-needed control. IEEE Robot. Autom. Lett. 3(1), 210–217 (2017)
Lei, Z.: An upper limb movement estimation from electromyography by using BP neural network. Biomed. Signal Process. Control 49, 434–439 (2019)
Wang, J., Liu, J., Zhang, G., Guo, S.: Periodic event-triggered sliding mode control for lower limb exoskeleton based on human–robot cooperation. ISA Trans. 123, 87–97 (2022)
Qingcong, W., Chen, Y.: Development of an intention-based adaptive neural cooperative control strategy for upper-limb robotic rehabilitation. IEEE Robot. Autom. Lett. 6(2), 335–342 (2021)
George, J.A., et al.: Robust torque predictions from electromyography across multiple levels of active exoskeleton assistance despite non-linear reorganization of locomotor output. Front. Neurorobot. 15 (2021)
Acknowledgements
This work was supported in part by the China national defense basic scientific research No. JCKY2019209B003.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Zheng, B., Guan, X., Li, Z., Zhao, S., Wang, Z., Li, H. (2022). The Variation Characteristic of EMG Signal Under Varying Active Torque: A Preliminary Study. In: Liu, H., et al. Intelligent Robotics and Applications. ICIRA 2022. Lecture Notes in Computer Science(), vol 13457. Springer, Cham. https://doi.org/10.1007/978-3-031-13835-5_65
Download citation
DOI: https://doi.org/10.1007/978-3-031-13835-5_65
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-13834-8
Online ISBN: 978-3-031-13835-5
eBook Packages: Computer ScienceComputer Science (R0)