
Abstract
Many problems can be solved by performing operations between Multi-valued Decision Diagrams (MDDs), for example in music or text generation. Often these operations involve an MDD that represents the result of past operations and a new constraint. This approach is efficient, but it is very difficult to implement with some constraints such as alldifferent or cardinality constraints because it is often impossible to represent them by an MDD because of their size (e.g. a permutation constraint involving n variables requires \(2^n\) nodes).
In this paper, we propose to build on-the-fly MDDs of structured constraints as the operator needs them. For example, we show how to realise the intersection between an MDD and an alldifferent constraint by never constructing more than the parts of the alldifferent constraint that will be used to perform the intersection. In addition we show that we can anticipate some reductions (i.e. merge of MDD nodes) that normally occur after the end of the operation.
We prove that our method can be exponentially better than building the whole MDD beforehand and we present a direct application of our method to construct constraint MDDs without having to construct some intermediate states that will be removed by the reduction process.
At last, we give some experimental results confirming the gains of our approach in practice.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


1 Introduction
Multi-valued and binary decision diagrams (MDDs/BDDs) took an important place in modern optimisation techniques. From the theory to the applications, MDDs have shown a large interest in operational research and optimisation [1, 2, 7, 10, 15, 18]. They offer a broad range of modeling and solving possibilities, from being a basic block of constraint solvers [6, 13], to the development of MDD-based solvers [3, 9, 19].
MDDs are a very efficient graph-based data structure to represent a set of solutions in a compressed way. The fundamental reasons of their use is their exponential compression power. A polynomial size MDD have the capacity to represent an exponential size set of tuples. For example in a music scheduling problem [16], an MDD having 14, 000 nodes and 600, 000 arcs stored \(10^{90}\) meaningful tuples of size one hundred. Unlike trees, where each leaf represent a solution, an MDD can have much fewer nodes and arcs than solutions.
MDDs are also often reduced, that is a reduction operation is applied to them. The reduction operation of an MDD merges equivalent nodes until a fix point is reached. It may reduce the size of an MDD by an exponential factor.
Several other operators are available to combine MDDs without decompressing them. The most important are the intersection, which corresponds to a conjunction of two constraints, and the union, which corresponds to a disjunction of two constraints and the negation.
Some problems can be solved by a succession of operations applied on MDDs [8, 14, 16]. In other words, there is no search procedure that is used. To do so, the different constraints are represented by MDDs, and they are combined by applying operators between these different MDDs. In this way, all solutions can be computed at once. However, even if the final solution can fit into memory, it is possible that the memory explodes during the intermediate computation steps - worse, it is even quite frequent that the MDD of the constraints are themselves too big to fit in memory because they are exponential, as for most cardinality constraints (e.g. alldifferent and global cardinality constraints). One solution to be able to represent such constraints is to relax them [4, 10]: we gain memory in exchange for the loss of information. Usually, a relaxed MDD is an MDD representing a super set of the solutions of an exact MDD. Preferably, these relaxed MDDs are smaller than their exact versions. In general in such techniques, the total size is a fixed given parameter, which has a strong impact on the quality of the relaxation. Even if this approach is efficient, it can still be unsatisfactory to a certain extent. The ideal would be to be able to perform the computations while remaining exact. This is what interests us in this article: to be exact. In particular, we are interested in being able to perform operations without having to represent the whole constraint’s MDD in order to avoid the problem of the intermediate representation.
More precisely the question we consider in this paper is: how can we compute an operation between a given MDD and the MDD of a constraint without consuming too much memory? We need to answer this question even if the MDD of the constraint cannot fit into memory. A simple example is the intersection between an MDD involving fifty variables and the MDD representing an alldifferent constraints on these variables. This latter MDD will have \(2^{50}\) nodes (i.e. 1, 000, 000 Giga nodes) and so is too big to fit in memory.
The main ideas of this paper are to avoid building the MDD of the constraint before applying the operation and to anticipate the reduction of the obtained MDD.
The first idea can be implemented by using operators that proceed by layer [14] because we can avoid building in advance the MDD of the constraint. During the operation, if a node can hold all the information necessary to build its children in a way that satisfies the constraint, then we do not need to retain all previous nodes. Thus, we can perform the construction having only at most two layers in memory (the current layer and the next one being built). Furthermore, if an arc does not exist in the first MDD, then it does not need to exist in the constraint’s MDD: building the MDD during the operation allows us to have more gain by only representing what is necessary to be represented.
The second idea is based on the remark that a constraint is useless when we can make sure that it will always be satisfied. For instance if 3 variables remains and if we know that they have disjoint domains then an alldifferent constraints between these variables is useless. Thus, we can avoid defining the constraint’s MDD and we can immediately merge some nodes that would have been merged by the reduction process and so gaining some space in memory.
The advantage of this approach is that it can provably gain an exponential factor in space. It has also a direct application to construct constraint MDDs without having to construct all intermediate states. This allows either to build constraint MDDs that cannot be built otherwise, or to build them much faster.
We also show that processing several constraints simultaneously is not advantageous compared to doing the operations successively for each constraint. This is due to the lack of reduction which is normally performed after each operation and which can strongly reduce the resulting.
The paper is organised as follows. First, we enrich the classical internal data of an MDD with several notions: we introduce the notion of node states allowing to represent the information associated with the node with respect to a certain constraint, the notion of transition function \(\delta _C(s,v)\) and the notion verification function \(V_C(s)\) allowing respectively to make the state of a node evolve by performing a transition of value v and to verify if a state is satisfying the constraint (absence of violation). Then, we elaborate on the importance of performing merges to have some control over the growing behavior of some constraints, by giving for each constraint described in the article the conditions to perform a merge. In addition, we try to convey some intuition of the potential gain behind these merges, which might greatly depend on the constraint’s parameters. Next, we give for each of these constraints a possible implementation of the state and functions \(\delta _C(s, v)\) and \(V_C(s)\), as well as a generic algorithm allowing to perform an on-the-fly intersection operation based on the notions described. We also give the size of the MDD representing each constraint. Afterwards, we prove that building the constraint’s MDD on the fly can be exponentially better than building the whole MDD beforehand. Finally, we present a direct application to compute constraint MDDs and we give some experimental results, notably for the car sequencing problem and we study the generalisation of our method for a set of constraints. At last, we conclude.
2 Preliminaries
2.1 Constraint Programming
A finite constraint network \(\mathcal{N}\) is defined as a set of n variables \(X=\{x_1,\ldots ,x_n\}\), a set of current domains \(\mathcal{D} = \{D(x_1),\ldots , D(x_n)\}\) where \(D(x_i)\) is the finite set of possible values for variable \(x_i\), and a set \(\mathcal{C}\) of constraints between variables. We introduce the particular notation \(\mathcal{D}_0 = \{D_0(x_1),\ldots , D_0(x_n)\}\) to represent the set of initial domains of \(\mathcal{N}\) on which constraint definitions were stated. A constraint C on the ordered set of variables \(X(C)=(x_{i_1},\ldots ,x_{i_r})\) is a subset T(C) of the Cartesian product \(D_0(x_{i_1}) \times \cdots \times D_0(x_{i_r})\) that specifies the allowed combinations of values for the variables \(x_{i_1}, \ldots , x_{i_r}\). An element of \(D_0(x_{i_1}) \times \cdots \times D_0(x_{i_r})\) is called a tuple on X(C). A value a for a variable x is often denoted by (x, a). Let C be a constraint. A tuple \(\tau \) on X(C) is valid if \(\forall (x, a) \in \tau , a \in D(x)\). C is consistent iff there exists a tuple \(\tau \) of T(C) which is valid. A value \(a \in D(x)\) is consistent with C iff \(x \not \in X(C)\) or there exists a valid tuple \(\tau \) of T(C) with \((x,a) \in \tau \). We denote by \(\#(a,\tau )\) the number of occurrences of the value a in a tuple \(\tau \).
We present some constraints that we will use in the rest of this paper.
Definition 1
Given X a set of variables and [l, u] a range, the sum constraint ensures that the sum of all variables \(x \in X\) is at least l and at most u.
sum\((l, u) = \{\tau \) | \(\ \tau \) is a tuple on X(C) and \(\ l \le \sum _{i=0}\tau _i \le u\}\).
A global cardinality constraint (gcc) constrains the number of times every value can be taken by a set of variables. This is certainly one of the most useful constraints in practice. Note that the alldifferent constraint corresponds to a gcc in which every value can be taken at most once.
Definition 2
A global cardinality constraint is a constraint C in which each value \(a_i \in D(X(C))\) is associated with two positive integers \(l_i\) and \(u_i\) with \(l_i \le u_i\) defined by
gcc\((X,l,u)=\{\tau |\tau \) is a tuple on X(C) and \(\forall a_{i} \in D(X(C)): l_{i} \le \#(a_{i},\tau ) \le u_{i}\}\).
2.2 Multi-valued Decision Diagram
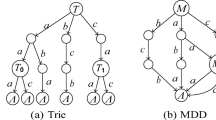
The decision diagrams considered in this paper are reduced, ordered multi-valued decision diagrams (MDD) [2, 12, 17], which are a generalisation of binary decision diagrams [5]. They use a fixed variable ordering for canonical representation and shared sub-graphs for compression obtained by means of a reduction operation. an MDD is a rooted directed acyclic graph (DAG) used to represent some multi-valued functions \(f: \{0...d-1\}^n \rightarrow {true,false}\). Given the n input variables, the DAG contains \(n+1\) layers of nodes, such that each variable is represented at a specific layer of the graph. Each node on a given layer has at most d outgoing arcs to nodes in the next layer of the graph. Each arc is labeled by its corresponding integer. The arc (u, a, v) is from node u to node v and labeled by a. Sometimes it is convenient to say that v is a child of u. All outgoing arcs of the layer n reach tt, the true terminal node (the false terminal node is typically omitted). There is an equivalence between \(f(a_1,...,a_n)=true\) and the existence of a path from the root node to the tt whose arcs are labeled \(a_1,...,a_n\).
The reduction of an MDD is an important operation that may reduce the MDD size by an exponential factor. It consists in removing nodes that have no successor and merging equivalent nodes, i.e. nodes having the same set of children associated with the same labels. This means that only nodes of the same layer can be merged.
3 Generalisation of the Construction Process
Perez and Régin [14] have explained how an MDD can be built directly from functions defining an automaton or a pattern. The general principle is to define states and to link them by a transition function, which can be defined globally or for each level. In order to be more general and less dependent on automata theory, we propose to generalize the previous concepts and to introduce a verification function. This is similar to what is done in [9, 11].
By doing so, the notion of state, the function of transition \(\delta _C(s, v)\) as well as the verification function \(V_C(s)\), form a lightweight and general scheme allowing an efficient on the fly construction of a constraint’s MDD.
3.1 State, Transition and Verification
The notion of state holds some information in an MDD node about the constraint representation, giving it an actual meaning: for the sum constraint, a state will hold the value of the sum for the current node. Given that piece of information, we will be able to build all the valid successors of a node.
In order to build the MDD layer by layer, i.e. to build the children of a node, we define a transition function on the nodes: this transition function takes into account the current state s of a node and the constraint C. Given a certain state, we need to build all successors of a node such that the state of each successor satisfies the constraint C.
Let \(\delta _C(s,v)\) be the transition function that builds a new state from a state s and a label v and \(V_C(s)\) the verification function that checks whether a state s satisfies the constraint or not.
Thanks to these notions we can define the following property:
Property 1
Nodes of the same layer with the exact same state can be merged.
Proof
The transition function \(\delta _C\) takes into account the constraint C and the current state s to build the successors of a node. The constraint C being invariant during the construction process, it means that for a given layer if \(s_1 = s_2\), then \(\delta _C(s_1) = \delta _C(s_2)\). In an MDD, two nodes can be merged if they have the same successors: therefore, we can merge two nodes having the same state. \(\square \)
Immediate Merges. If during the construction of the MDD, we can clearly see that some nodes will be merged during the reduce operation, then we can immediately merge some states. However, merging states will result in the loss of precision concerning the information represented. For instance, if two nodes representing a sum \(s_1\) and \(s_2\) are merged, the result of this merge is the set \(\{s_1, s_2\}\). The node holding this state could be considered to be in both state \(s_1\) and \(s_2\) at the same time. Now, let’s imagine that we must have a sum satisfying the range [10, 15], and that we have a merged state of [14, 15] for a given node: can we add 1? The answer is yes when considering 14, and no when considering 15. This shows that, in order not to lose information about the constraint (i.e. solutions), we have to be careful about what we merge - we cannot do it blindfolded. In a general way, a node holding a merged state would mean that the state of this node represents less information than the initial constraint (which is the case for the gcc constraint), or in extreme cases that the state of the node does not matter anymore (which is the case for the sum constraint).
For each constraint described in this article, we will detail: the total number of states for the constraint, the conditions to perform a merge and its consequences for the size of the MDD. Please note that the impact of the merges on the size highly depends on the constraint and its parameters.
We will now present a possible implementation for the sum, gcc, and alldifferent constraints. Henceforth, we will refer to the transition function \(\delta \) as createState and the verification function \(V_C\) as isValid.

Merged states in the sum, with \(min = 4\) and \(max = 9\). The merged path (red) necessarily lead to tt, whatever the value taken.
3.2 Sum
Representation. The sum constraint is simply represented by the minimum min and maximum max value of the sum. For convenience purposes, we also add the minimum \(v_{min}\) and maximum \(v_{max}\) value of D, the union of the domains of the variables involved in the constraint.
The state is represented by a single integer sum (Fig. 1).
Transition and Validity. Creating a state means to add the label’s value to the current sum, and a transition is valid if the obtained sum belongs in the constraint’s bounds (See Algorithm 1).
Number of States. The number of states at layer i is at most \(i \times (v_{max} - v_{min} + 1)\). The total number of states in the MDD is therefore at most:
This upper bound is achieved when the set of values D is an integer range. This number can also be bounded by the upper and lower bounds of the sum.
Merging Condition. Let s be the state representing a sum. If \(min \le s + (n-layer) \times v_{min}\) and \(s + (n-layer) \times v_{max} \le max\), then we are certain to satisfy the constraint no matter what values we assign next. Therefore, we can drop the state of the node. Table 1 gives some experimental results of immediate merges.

3.3 GCC
Representation. To represent the gcc constraint, we need: the set V of constrained values, and the minimum \(lb_v\) and maximum \(ub_v\) occurrences of each specific value \(v \in V\). To represent the state, we only need a array count that contains the number of occurrences of each value \(v \in V\). We also define another variable named minimum that counts the minimum number of layers required to reach all the lower bounds of values.
Transition and Validity. Creating a new state means adding 1 to the counter of the value of the label we take if this value is constrained. A transition is valid if we can reach the lower bounds with the remaining layers, and if the added value of the label is not greater than its upper bound (always true if the value is not constrained, of course). Algorithm 2 is a possible implementation.
Notation 1
-
n is number of variables and layer the index of the current layer.
-
\(\forall v \in V\): \(c_v\) is the number of times v is assigned, \(lb_v\) the lower bound of v and \(ub_v\) the upper bound of v.
Number of States. The number of states in a gcc is at most:
because this is the number of count tuples that can be represented by the numeral system defined by the gcc.
Merging Condition
Property 2
We can remove the count \(c_v\) of value v from the state iff:
If the number of variables left to assign is less than the number of times we can assign the value v, and if the lower bound \(lb_v\) is reached, then it means that, no matter how many times we assign the value v to the future variables, we are certain to be in the range \([lb_v, ub_v]\).
Example: Let the bound \([lb_v, ub_v] = [10, 20]\), \(c_v = 10\) and \(n - layer = 10\). Then, we can have a merged state \([c_v, c_v+i] = [10, 10+i]\) up to \(i = n-layer = 10\). In that case, the value v can be ignored (i.e. deleted) by the state because, no matter what choices we make, we are assured to satisfy the constraint: there is therefore no need to take into account v.
Table 2 gives some experimental results of immediate merges.

3.4 AllDifferent
Representation. The alldifferent constraint is simply a gcc constraint for which the set of values V contains all values and each value can only be assigned once. We represent the state by the set of previously assigned values.
Transition and Validity. A transition is valid if the label is not already assigned. To create a new state, we simply copy the current state (i.e. the set of assigned values) and add to it the new label (See Algorithm 3).
Number of States. The number of states in the \(i^{th}\) layer for a given set of constrained values V is \({|V| \atopwithdelims ()i}\). Therefore, the total number of nodes in the MDD is:
Merging Condition. The alldifferent constraint can be seen as a gcc constraint where all values \(v \in V\) are associated with the range [0, 1]. Thus, the merging conditions for the alldifferent constraint is the same as the gcc under the described parameters: it means that we can only merge during the last layer, which is negligible.

3.5 Generic Constraint Intersection Function
This function is a possible implementation of the generic constraint intersection function. It is based on Functions defined in [14]. It shows that we do not need to store the full MDD\(_c\) and that we build the next layer only knowing the current layer.

4 Exponential Gain
Theorem 1
Building the MDD of a constraint on the fly can be exponentially better in terms of space and time than building the whole MDD beforehand.
Proof. We show how to perform an intersection between MDD\(_x\), an MDD, and MDD\(_{AD}\) the MDD of an alldifferent constraint. Let x be a number of sets, MDD\(_x\) is built as follows (See Fig. 2 for \(x=3\) and \(|X|=3\)):
-
Step 1 - Generate MDD\(_U(X)\) a universal MDD with domain X. This means that the variables can take any value in X.
-
Step 2 - Copy the MDD from step 1 for x sets having a cardinality equal to |X| and make the union of them. We denote by MDD\(_V\) the obtained MDD.
-
Step 3 - Copy x times \(MDD_V\), and concatenate them.

Final step. For convenience purposes, we represent only one arc for a whole set of values.
The size of MDD\(_{AD}\) is exponential (i.e. at least \(2^{n}\)). So, when n is large, it is not possible to build it. However, the size of MDD\(_x\) \(\cap \) MDD\(_{AD}\) is exponentially smaller than the size of MDD\(_{AD}\), and our method is able to compute this intersection as shown by the following process:
-
1.
The number of nodes in the MDD\(_{AD}\) involving all the variables is \(2^{|X| \times x}\), being \((2^{|X|})^x\).
-
2.
MDD\(_V\) is the union of x universal MDDs. The intersection between a universal MDD and MDD\(_C\) (i.e. the MDD of a constraint C) is MDD\(_C\). So, for any set X, the intersection between MDD\(_U(X)\) and MDD\(_{AD}\) is equal to MDD\(_{AD}\) which has \(2^{|X|}\) nodes.
-
3.
We can simplify by stating that each MDD\(_U(X)\) is an arc. The shape of our MDD is therefore the one of a universal MDD. Thus, the same observation that in 2. applies: the simplified MDD intersecting with the alldifferent constraint is the MDD of the alldifferent constraint. It is denoted by metaMDD\(_{AD}\).
-
4.
If we know the number of arcs in our metaMDD\(_{AD}\), we can deduce the number of nodes created during the intersection.
-
5.
The layer i of metaMDD\(_{AD}\) contains \({x \atopwithdelims ()i}\) nodes.
-
6.
Each node in the layer i has (x – i) out-going arcs (because we already chose i values of the x possible).
-
7.
By combining (5) and (6), the total number of arcs in our metaMDD\(_{AD}\) is \(\sum ^{x}_{i=0} {x \atopwithdelims ()i} \times (x-i) = x \times 2^{x-1}\)
-
8.
By combining (2) and (7), the total number of nodes in our metaMDD\(_{AD}\) is \(x \times 2^{x-1} \times 2^{|X|} = x \times 2^{|X| + x - 1}\), because each arc of metaMDD\(_{AD}\) is an MDD\(_{AD}(X)\) involving |X| variables.
-
9.
The difference between (8) \(x \times 2^{|X| + x - 1}\) and (1) \((2^{|X|})^x\) is exponential. \(\square \)
We perform some benchmarks to experimentally confirm this gain.
4.1 Building the AllDifferent’s MDD
Table 3 shows that the alldifferent constraint quickly becomes impossible to construct: after barely 24 values it is impossible to represent the constraint.
4.2 Performing the Construction on the Fly
The results of Table 4 show that by constructing the alldifferent’s MDD on the fly, it is possible to compute intersections with a lot of values (here between \(|V| = 25\) and \(|V| = 100\)) very efficiently. We notice that, when we increase the number of sets, the intersection becomes more and more difficult to compute: this testifies to the exponential behaviour of the constraint.
The second test (Table 5) is a variant of the first one (Table 4). Arcs are added randomly between several sets, which as a consequence drastically increases the number of states in the MDD. The result is that intersection becomes impossible very quickly: for 6 sets and 6 values by set, we have a factor of 5 200 in time.
5 Application: Construction of the MDD of Constraints
In this section, we show that our method can be useful to build the MDD of some constraints and not only to perform some intersections.
Consider C a constraint. Suppose that the construction of MDD\(_C\), the MDD of C, is problematic because a very large number of intermediate states are generated but do not appear in the reduced MDD\(_C\). As the reduction can gain an exponential factor this case is quite conceivable. It occurs, for example, with a bounded sum of variables that can take very different values. The number of states created is therefore huge, but it is quite possible that the reduction induced by the bounds on the sum removes a large part of them.
This kind of constraint can either prevent us from building the MDD due to lack of memory to store all the intermediate states, or require a lot of time to compute. To remedy these problems we propose to use successively our method on relaxations of MDD\(_C\) allowing to deal with smaller MDDs.
This approach assumes that it is possible to define different relaxations of MDD\(_C\) more or less strong. We recall that an MDD is a relaxation of an MDD if it represents a super set of the solutions of the exact MDD. In addition, we assume that the relaxation has fewer nodes. This is achievable by merging nodes for relaxing the MDD, which is quite usual. Thus, we suppose that we have MDDs noted Relax(MDD\(_C\),p) which are relaxations of MDD\(_C\) according to a parameter p such that \(p < q\) implies Relax(MDD\(_C\),p) is smaller than or equal to Relax(MDD\(_C\),q). The value of p can be ad hoc. For example, for a sum constraint, a relaxation is simply to consider the numbers up to a given p precision. Thus we can merge many more states and the greater the precision the less the MDD is relaxed.
For convenience we will consider that Relax(MDD\(_C\),n) is MDD\(_C\). Then, we can compute MDD\(_C\) by applying the following process named OTF Inc:
-
1.
Let \(M \leftarrow \) Relax(MDD\(_C\),p)
-
2.
Compute \(M'\) by performing the intersection on the fly between M and Relax(MDD\(_C\),\(p+1\))
-
3.
Set \(p \leftarrow p+1\), and \(M \leftarrow M'\)
-
4.
If \(p <n\) then goto 2 else return M
6 Experiments
6.1 Constraint Building
We consider the following stochastic problem: there are n variables with domains having the same size. The values represent the chance for an event to appear. A solution is a combination of events such that their chance to happen simultaneously is above a certain threshold, for instance 75%. This problem is equivalent to a bounded product of variables. The goal is to build the MDD containing all the solutions. It is equivalent to building the MDD of \(C_{\varPi }\) the constraint defining a bounded product of variables. The difficulty is that values are quite different (because computed from other elements) leading to the lack of collision.
We propose to compute the MDD of this problem by using the process OTF Inc defined in Sect. 5. We define Relax(MDD\(_{C_{\varPi }}\),p) by the MDD of \(C_{\varPi }\) for which the variables have been rounded to a precision p (i.e. the number of decimal places after the decimal point).
We test the method on different sets of data (available upon request). Each set involves values between 0.95 and 1 with at least 4 digits. The combined probability must be greater than 0.9. We compare the time and memory needed to compute the MDD using OTF Inc and the MDD directly computed (Base), both for a final precision \(p = 8\), starting from \(p = 0\). Table 6 shows that we obtain a factor of at least 9 both in time and in memory. We achieve up to a factor of 77.55 in time (181.5 s vs 2.6 s) and 19 in memory (405 MB vs 7 617 MB) for the hardest dataset (set 5).
6.2 The Car Sequencing Problem
A number of cars are to be produced. There are different options available to customise a car, and it is possible that a car has to be built with several options (paint job, sunroof, ABS, etc.). Each option is installed in a station that has a maximum handling capacity: if, for example, a station installing an option A can only handle one car in any two, then the assembly line must be designed in such a way that there are never two cars in a row requiring the option A. This constraint must be satisfied for each station. This problem is NP-complete.
All instances used in this article are available on csplib: https://www.csplib.org/Problems/prob001/data/data.txt.html
We will use the following methods:
-
OTF: On The Fly, the method presented in this article.
-
OTF\(_\times \): OTF performing operations with multiple constraints at once.
-
Classic: The method that builds the MDD then performs the operation.
For the car sequencing problem it means that the final MDD is built as follows: for the classic method, we build the MDD containing all sequence constraints, then we build the MDD of the gcc, and we perform the intersection between these two MDDs. For the OTF method, we do the same as the classic method, but the intersection with the gcc is done on the fly (we do not build the gcc MDD). Finally, for the OTF\(_\times \), we directly compute the intersection between the sequence and gcc, without building them explicitly.
Table 7 shows that it is possible to build an MDD that is not possible to build otherwise (because the gcc explodes in memory). Thus, we can conclude that an instance has no solution (Problem 19/71), which we could not do before. In the case of larger problems, we still manage to observe a strong progression, even if it remains insufficient: where we could only build 38 layers of the gcc, we manage to carry out the intersection with it up to layer 41 (Problem 60-02). These results clearly show the advantage of this intersection method.
We notice that OTF\(_\times \) is systematically worse than the method doing them one by one (Problem 4/72, Problem 60-02), and even worse in some cases than Classic (Problem 60-02). This can be explained by the fact that the complexity is proportional to the number of states constructed for each constraint. However, by making successive intersections, we observe a reduction in the number of solutions, which can imply (and does imply in a general case) a reduction of states. Performing several operations at the same time is therefore not interesting, especially if the MDDs are easy to construct, i.e. they are not exponential in memory like would be alldifferent or gcc.
7 Conclusion
This article shows that building constraints’ MDD during an operation is more advantageous in every way than building the complete constraint’s MDD first, even if it does not prevent an explosion of memory. Moreover, this method shows a major impact in performance for solving some well known problems or building MDDs of constraints. However, doing multiple constraints at once is not necessarily better, and is shown to be worse most of times.
References
Andersen, H.R.: An Introduction to Binary Decision Diagrams (1999)
Bergman, D., Ciré, A.A., van Hoeve, W., Hooker, J.N.: Decision Diagrams for Optimization. Artificial Intelligence: Foundations, Theory, and Algorithms. Springer, Heidelberg (2016). https://doi.org/10.1007/978-3-319-42849-9
Bergman, D., Cire, A.A., Van Hoeve, W.J., Hooker, J.N.: Discrete optimization with decision diagrams. INFORMS J. Comput. 28(1), 47–66 (2016)
Bergman, D., van Hoeve, W.-J., Hooker, J.N.: Manipulating MDD relaxations for combinatorial optimization. In: Achterberg, T., Beck, J.C. (eds.) CPAIOR 2011. LNCS, vol. 6697, pp. 20–35. Springer, Heidelberg (2011). https://doi.org/10.1007/978-3-642-21311-3_5
Bryant, R.E.: Graph-based algorithms for Boolean function manipulation. IEEE Trans. Comput. 35(8), 677–691 (1986). https://doi.org/10.1109/TC.1986.1676819
Cheng, K.C.K., Yap, R.H.C.: An MDD-based generalized arc consistency algorithm for positive and negative table constraints and some global constraints. Constraints 15(2), 265–304 (2010). https://doi.org/10.1007/s10601-009-9087-y
Davarnia, D., van Hoeve, W.: Outer approximation for integer nonlinear programs via decision diagrams. Math. Program. 187(1), 111–150 (2021). https://doi.org/10.1007/s10107-020-01475-4
Demassey, S.: Compositions and hybridizations for applied combinatorial optimization. Habilitation à Diriger des Recherches (2017)
Gentzel, R., Michel, L., van Hoeve, W.-J.: HADDOCK: a language and architecture for decision diagram compilation. In: Simonis, H. (ed.) CP 2020. LNCS, vol. 12333, pp. 531–547. Springer, Cham (2020). https://doi.org/10.1007/978-3-030-58475-7_31
Hadzic, T., Hooker, J.N., O’Sullivan, B., Tiedemann, P.: Approximate compilation of constraints into multivalued decision diagrams. In: Stuckey, P.J. (ed.) CP 2008. LNCS, vol. 5202, pp. 448–462. Springer, Heidelberg (2008). https://doi.org/10.1007/978-3-540-85958-1_30
Hoda, S., van Hoeve, W.-J., Hooker, J.N.: A systematic approach to MDD-based constraint programming. In: Cohen, D. (ed.) CP 2010. LNCS, vol. 6308, pp. 266–280. Springer, Heidelberg (2010). https://doi.org/10.1007/978-3-642-15396-9_23
Kam, T., Brayton, R.K.: Multi-valued decision diagrams. Technical report. UCB/ERL M90/125, EECS Department, University of California, Berkeley. http://www2.eecs.berkeley.edu/Pubs/TechRpts/1990/1671.html
Perez, G., Régin, J.-C.: Improving GAC-4 for table and MDD constraints. In: O’Sullivan, B. (ed.) CP 2014. LNCS, vol. 8656, pp. 606–621. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10428-7_44
Perez, G., Régin, J.C.: Efficient operations on MDDs for building constraint programming models. In: International Joint Conference on Artificial Intelligence, IJCAI 2015, Argentina, pp. 374–380 (2015)
Perez, G., Régin, J.C.: Soft and cost MDD propagators. In: The Thirty-First AAAI Conference on Artificial Intelligence (AAAI 2017) (2017)
Roy, P., Perez, G., Régin, J.-C., Papadopoulos, A., Pachet, F., Marchini, M.: Enforcing structure on temporal sequences: the Allen constraint. In: Rueher, M. (ed.) CP 2016. LNCS, vol. 9892, pp. 786–801. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-44953-1_49
Srinivasan, A., Ham, T., Malik, S., Brayton, R.K.: Algorithms for discrete function manipulation. In: 1990 IEEE International Conference on Computer-Aided Design. Digest of Technical Papers, pp. 92–95 (1990). https://doi.org/10.1109/ICCAD.1990.129849
Tjandraatmadja, C., van Hoeve, W.-J.: Incorporating bounds from decision diagrams into integer programming. Math. Program. Comput. 13(2), 225–256 (2020). https://doi.org/10.1007/s12532-020-00191-6
Verhaeghe, H., Lecoutre, C., Schaus, P.: Compact-MDD: efficiently filtering (s) MDD constraints with reversible sparse bit-sets. In: IJCAI, pp. 1383–1389 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 Springer Nature Switzerland AG
About this paper

Cite this paper
Jung, V., Régin, JC. (2022). Efficient Operations Between MDDs and Constraints. In: Schaus, P. (eds) Integration of Constraint Programming, Artificial Intelligence, and Operations Research. CPAIOR 2022. Lecture Notes in Computer Science, vol 13292. Springer, Cham. https://doi.org/10.1007/978-3-031-08011-1_13
Download citation
DOI: https://doi.org/10.1007/978-3-031-08011-1_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-08010-4
Online ISBN: 978-3-031-08011-1
eBook Packages: Computer ScienceComputer Science (R0)