
Abstract
We interact with different types of soft materials on a daily basis such as salt, hand cream, etc. Recently we have shown that soft materials can be described using four perceptual dimensions which are deformability, granularity, viscosity, and surface softness [1]. Here, we investigated whether humans can actually perceive systematic differences in materials that selectively vary along one of these four dimensions as well as how judgments on the different dimensions are correlated to softness judgments. We selected at least two material classes per dimension (e.g., hair gel and hand cream for viscosity) and varied the corresponding feature (e.g., the viscosity of hair gel). Participants ordered four to ten materials from each material class according to their corresponding main feature, and in addition, according to their softness. Rank orders of materials according to the main feature were consistent across participants and repetitions. Rank orders according to softness were correlated either positively or negatively with the judgments along the associated four perceptual dimensions. These findings support our notion of multiple softness dimensions and demonstrate that people can reliably discriminate materials which are artificially varied along each of these softness dimensions.
Research was supported by the EU Marie Curie Initial Training Network “DyVito” (H2020-ITN, Grant Agreement: 765121), Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – project number 222641018 – SFB/TRR 135, A5, and EU FET-OPEN Project “ChronoPilot” (H2020 – Grant Agreement: 964464.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Studies focusing on haptic softness traditionally equated softness with the compliance of materials [2,3,4]. However, we have recently shown that everyday materials that appear more or less soft do not only differ in their perceived compliance (i.e., deformability in response to normal pressure) but also in their surface softness, granularity, and viscosity [1]. Thus, material features in quite different perceptual dimensions seem to underlie the perception of softness. While there are a number of studies that focused on deformability (i.e., compliance), often using custom-made rubber silicone stimuli [3, 4], the other dimensions have been rarely studied, if at all. One exception is a study [5] on the haptic discrimination of viscous materials by stirring every day-like liquids with spatula vs. with index finger. This study showed a much better viscosity perception when exploring directly with the finger as compared to the indirect exploration with a tool (see [6] for another viscosity example).
Here, we investigate whether people can actually perceive systematic and consistent differences in materials that vary along each one of the four different perceptual dimensions that we previously found to be associated with soft, everyday materials. More importantly we tested whether participants judgments along these single dimensions would correlate with their softness judgements as we suppose that these dimensions underly perceived softness. As in [5] we aim to use classes of everyday materials that can be selectively varied along a single perceptual dimension such as grain sizes for granularity. This allowed us to measure discrimination within a single dimension. We selected at least two material classes per dimension and varied the levels of the corresponding dimension with each material class (e.g., therapy dough varied in deformability). Participants were blindfolded and asked to order each material once according to the main dimension feature (the most distinctive softness feature of a dimension, e.g., order based on decreasing viscosity) and once according to softness. Using Spearman’s rho correlations, we tested the consistency between ordering as well as the relationship between softness judgements and the four perceptual dimensions.
2 Methods
2.1 Participants
Twenty students (10 males) with mean age of 22.5 years (age range: 19–28, SE: .63) from Giessen University participated in the study. They were naïve to the aim of the experiment and none of them reported any sensory or motor impairments. All participants had two-point touch discrimination better than 4 mm at the index finger. They gave written informed consent prior to the experiment in accordance with the Declaration of Helsinki except preregistration (2013).
2.2 Setup and Materials
Materials were presented on plastic plates (diameter: 21.5 cm). Participants sat at a table on which the materials were presented (see Fig. 1). They were blindfolded with sleep masks. Earplugs and active noise cancelling headphones (Sennheiser HD 4.50 BTNC) were used to block any noises which could be generated from exploring the materials. The experimenter stood next to the participants, exchanged the stimuli, and collected the participant’s responses. A standard computer with MATLAB 2019b (MathWorks Inc. 2007) was used to guide the experimenter and collect the responses. All materials (except silicone which has sufficient lifetime) were replaced after each participant warranting that the materials felt similar for each participant.
Material classes were selected based on findings on the four softness-associated dimensions in [1]. We chose basis materials that had high values in one of the four dimensions (i.e., high dimension scores in the PCA that had revealed the 4 dimensions) and built a material class by varying the main feature of the dimension for each material. High-scoring materials for each dimension were as follows; granularity: salt and sand; viscosity: hand cream and hair gel; surface softness: velvet, fur, and cotton; deformability: therapy dough and custom-made silicone rubber stimuli, (see [2, 3] for some examples). For each material we selected several exemplars with different levels of main dimension feature (e.g., varying granularity of salt, by varying grain size). We intended to collect as many feature levels as possible within each material class which resulted in unequal number of levels across materials. We either created or purchased (if commercially available, see Appendix A Table 1.) the materials in different levels. Our aim was to create materials which lie along the four different dimensions and are discriminable from each other. To this end, we formed an initial material set based on our own perception, and piloted the materials to check whether the intermediate levels could also be distinguished by others. If some steps were indistinguishable we increased the differences between stimuli (e.g., adding more water to diluted hand cream). The proper experiment here, then served to corroborate the piloting results for a representative sample and to test the correlation with softness judgments.

Illustration of the setup and an example material set (i.e., granular material: salt) in the experiment. A blindfolded participant explores salt in different levels of granularity. Samples of fur, cotton, and velvet used in the experiment (right).
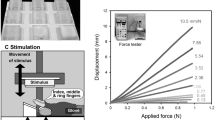
In order to vary the granularity levels of sand (six levels) and salt (seven levels), we mixed materials of different grain sizes (e.g., material with grain size of 0.1–0.3 mm was mixed with material of grain size 0.4–0.8 mm). None of the participants noticed that the granular materials are mixture. We diluted hand cream and hair gel with water as well as mixing different types hair gel (five levels) or hand cream (five levels) with each other to manipulate the viscosity. Silicone rubber stimuli were created in ten different compliance levels by mixing two components of silicone rubber solution (AlpaSil EH 10:1) in addition to different amounts of silicone oil (polydimethylsiloxane). All details on these mixtures can be found in the appendix. The therapy doughs (Theraputty, ABH Webshop) were purchased in eight strength levels from very soft to very hard. For material classes belonging to surface softness, namely for cotton, fur, velvet, we arbitrarily selected the levels based on the hair length.
2.3 Design and Procedure
We divided participants and the materials into two different groups in order to keep the duration of the experiment within reasonable limits (~3 h per participant including 2 breaks up to 10 min each). Participants in the first group only explored hair gel, sand, velvet, and silicone while the others explored hand cream, salt, fur, cotton, and therapy dough. Upon arrival, they signed the informed consent which was followed by initial instructions. During the experiment each material set was presented eight times, four times for softness judgements and four times for judgments on its corresponding main dimension. In each trial participants were presented with the full set of materials from a single material class. The participant’s task was to order the set according to the main dimension that was named and further explained by 1–2 adjectives (see Fig. 2, depiction for details) or according to softness. Softness was not further defined, because we were interested to find out how people use the term “soft” for our stimuli. There were no restrictions within trials, participants were able to go back to a previous material and re-explore it as often as they wanted. With this, we aimed to rule out the role of memory in the rating task. While the participants in the first group performed 32 trials (4 material sets × 4 repetition × 2 judgment types) participants in the second group performed 40 trials (5 material sets × 4 repetition × 2 judgment types). The presentation order of material sets and the position of each material within a set were randomized.
2.4 Data Analysis
First, the average rankings of each participant for the material sets were calculated across four trials separately for judgments according to softness and according to the dimension corresponding to the material class. Then we calculated the average ranking values of each material within the material set across participants. We correlated these average values with each participant’s responses. In 28 (10 surface softness, 5 deformability, 8 viscosity, and 5 granularity) of 90 cases, participant’s orders were negatively correlated with the average order, meaning that these participants had ordered materials in the opposite direction as compared to other participants (e.g., coarser to finer instead of finer to coarser for granular materials). We hence inverted the individual data that were negatively correlated with the average order. We looked at the switches in overall data of a person. We assumed that participants were consistent in their orders, and did not consider inverting data trial-wise. In single-trial data reversed orders can hardly be distinguished from confusions anyway. After inverting, we again calculated average responses across participants in order to determine the perceptual levels within each material set. Next, we correlated each individual’s data with the grand average in order to check the consistency across participants. Finally, using Spearman’s rho analyses we correlated judgments according to softness and according to the dimension corresponding to each material class.
3 Results
Figure 2 shows the confusion matrices of rank orders for the softness-associated dimensions. By averaging rank orders across participants and repetitions, we determined average rank orders of the different material levels (x-axis), i.e., each column corresponds to one material. Along the y axes we depicted the actual (relative) frequency that a material level was assigned a certain rank in each individual trial (e.g., sum of all responses). As can be seen, participants highly agreed in how they order the levels of salt, sand, velvet, and silicone material, while there was some confusion for the other material sets. For instance, people frequently confused the current level of cotton or hair gel (i.e., level two) with the previous (i.e., level one) or the next level (i.e., level three), which indicates that here successive levels were perceptually close to each other. Individual rankings mostly differ in hand cream and hair gel. In order to statistically test the consistency between participants, we calculated the Cohen’s weighted kappa using a leave-one-out approach in which each person's responses are compared to the average excluding that person for each material class. Overall, the average of the weighted kappa (10 per class) indicated at least substantial interindividual consistency; fur = .67, cotton = .71, velvet = .79, hair gel = .64, hand cream = .57, therapy dough = .80, silicone = .89, sand = .92, and salt = .87.

The disagreement matrices show the percentages of individual trial-wise rankings. Hues correspond to dimensions (blue: surface softness [most velvety/furry to least], purple: deformability [most elastic/flexible to least], pink: viscosity [most viscous/sticky to least], red: granularity [finest to coarsest]). The shades get darker with higher agreement between individual and average ranks while they get lighter with less agreement (due to rounding rows do not necessarily add up to exactly 100%) (Color figure online).
In order to look at the relationship between the average softness rankings and associated dimensions (i.e., granularity, viscosity, surface softness, and deformability) we correlated the average rankings across feature levels and material classes for each dimension (Fig. 3). Softness and granularity were correlated positively rs = .99, p < .01. Similarly, the correlation between softness and surface softness was significantly positive rs = .94, p < .01 as well as the relationship between deformability and softness, rs = .99, p < .01. Finally, viscosity and softness rankings were correlated negatively, rs = −.91, p < .01.

Correlations between average rankings from softness (y axes) and softness-associated dimensions (x axes). Blue lines represent the linear regression trendlines. (Color figure online)
4 Discussion
Haptic softness has been defined as the subjective deformability and compressibility degree of objects and materials [7]. How different materials deform varies widely: while elastic rubber stimuli quickly returning its original form, therapy dough keeps its shape for a while even after the force is removed. Other materials such as velvet or salt deform yet in their own ways – all these materials can be characterized as soft from this definition. For many everyday materials, perceived softness seems to be associated with four perceptual dimensions which are surface softness, granularity, viscosity, and deformability [1]. Here, we tested whether humans perceive consistent and systematic differences in materials that we created to vary within each given dimension, and how judgments about the dominant dimension feature correlate with softness judgments. In general, participants were able to order different levels of stimuli within each dimension in substantially coherent manners, and their judgments were correlated with the softness. The former finding can be considered a general proof that the claimed dimensions indeed represent perceptual continua along that humans can discriminate materials. The latter finding fits with the idea that softness has multiple dimensions. Previous practice equate haptic softness mainly to compliance of materials [2,3,4]. In line with those studies we found a positive correlation between softness and (perceived) deformability in response to normal forces. However, we also found correlations with other dimensions:
-
1.
Results show a significant positive correlation between granularity and softness judgments in granular materials (i.e., salt and sand). Specifically, granular materials felt more granular and softer when the grain sizes were smaller. When the grain size of the stimuli decreases, our receptors might not be able to sense the edges of the salt or sand grains. This, in turn, might lead us to associate the finer particles with a softer feeling and coarser particles with a harder feeling.
-
2.
Decreased levels of viscosity was correlated with increased softness for viscous materials: the more diluted a viscous material is the softer it felt. The dilution of the viscous materials resulted in overall reduction in both density and viscosity. It seems like both are negatively related to softness. However, the current results cannot discern whether the relationship depends on density or viscosity. By carefully manipulating one of the two variables, future studies can investigate both possibilities in detail. A general limitation of the current study was the lack of physical measurements of the materials. In future, we will focus on the physical characteristics of the stimuli.
-
3.
We also found a positive relationship between surface softness and softness. This relationship might be affected by the length of the hairs or the thread size of the fabric. While a fabric might feel softer with the increased hair length, it might feel harder with the increased thread size.
Here, we used a ranking task which is proven to save time, yet tends to be complex and might yield confusion as observed in inversed sorting directions. Future studies might consider using a less complex task such as magnitude estimation. Also, demand characteristics might play a role in ranking tasks and future studies should investigate this point as well. Further, a multidimensional nature of softness, implies an important caveat for softness experiments. When asking participants to judge softness of different materials, the meaning of the softness should carefully be defined. If an experimenter only asks participants to rate softness, what participants think of as softness might inter-individually differ.
In conclusion, we showed that different material sets that vary along each single softness dimension and along that people perceive differences can be created, and that these dimensions covary with softness judgments.
References
Cavdan, M., Doerschner, K., Drewing, K.: Task and material properties interactively affect softness explorations along different dimensions. IEEE Trans. Haptics 14, 603–614 (2021). https://doi.org/10.1109/TOH.2021.3069626
Kaim, L., Drewing, K.: Exploratory strategies in haptic softness discrimination are tuned to achieve high levels of task performance. IEEE Trans. Haptics 4, 242–252 (2011)
Srinivasan, M., LaMotte, R.: Tactual discrimination of softness. J. Neurophysiol. 73, 88–101 (1995). https://doi.org/10.1152/jn.1995.73.1.88
Xu, C., Wang, Y., Gerling, G.: An elasticity-curvature illusion decouples cutaneous and proprioceptive cues in active exploration of soft objects. PLoS Comput. Biol. 17, e1008848 (2021). https://doi.org/10.1371/JOURNAL.PCBI.1008848
Bergmann Tiest, W., Vrijling, A., Kappers, A.: Haptic discrimination and matching of viscosity. IEEE Trans. Haptics 6, 24–34 (2013)
Caldiran, O., Tan, H., Basdogan, C.: Visuo-Haptic discrimination of viscoelastic materials. IEEE Trans. Haptics 12, 438–450 (2019)
Di Luca, M.: Multisensory Softness. Springer London (2014). https://doi.org/10.1007/978-1-4471-6533-0
Acknowledgement
The authors thank Jonas Wellmann for data collection. The authors express their gratitude to Hatice Dokumaci and Öznur Bastürk for carefully preparing the stimuli and collecting data and Oleksandra Nychyporchuk for the illustration of the setup.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix A
Appendix A
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
Cavdan, M., Doerschner, K., Drewing, K. (2022). Haptic Discrimination of Different Types of Soft Materials. In: Seifi, H., et al. Haptics: Science, Technology, Applications. EuroHaptics 2022. Lecture Notes in Computer Science, vol 13235. Springer, Cham. https://doi.org/10.1007/978-3-031-06249-0_1
Download citation
DOI: https://doi.org/10.1007/978-3-031-06249-0_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-06248-3
Online ISBN: 978-3-031-06249-0
eBook Packages: Computer ScienceComputer Science (R0)