
Abstract
This paper reports on a numerical study carried out to evaluate the quasi-static cyclic response of three endplate joints using hollo-bolts and non-concrete-filled tubular columns. The present research follows an experimental program involving monotonic tests of 22 specimens, covering different sets of connections and configurations. This study introduces a numerical prevision of the behaviour of the joints’ components when subjected to both tension and shear originated by a cyclic loading, indicating that without proper reinforcement, these joints cannot be used in zones with high seismicity, given their weakness. Numerical simulations using ANSYS software are compared against the experimental monotonic tests to ensure results concordance and reliability. The purpose of this paper is to present and discuss the numerical descriptions of the main response characteristics including hysteretic loops, stiffness and strength degradation, pinching effects, energy dissipation, among other structural properties. The models indicated that the HBM20 have sufficient mechanical strength, but the column’s plasticity is too large to ensure a proper dynamic response when large moments are applied. However, due to their fast assembly and aesthetical design, new solutions are being implemented to increase the strength and resistance of these joints in order to meet the earthquake design requirements. The most relevant components of these joints that increase their structural properties are also mentioned. These findings allow having a deeper understanding of the behaviour of these connections in seismic scenarios and the results serve as a basis for a future experimental campaign dedicated to evaluate the dynamics of non-concrete-filled blind-bolted connections.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Tubular structures are recognized for their structural, technological, and aesthetical advantages that lead to optimized and economical solutions. However, the main drawback related to their use in joints, especially considering bolted connections, is the inaccessibility to the inside of the section to tighten a nut. Therefore, several solutions have come up trying to overcome this issue. Lindapter’s Hollo-bolt (HB) is one of those examples and stands out among the others due to its particular legs that prevent the bolt from sliding due to friction. Mesquita [1] and Mesquita et al. [2] extensively described both HBM20 and HBM16 and evaluated their monotonic response under different conditions. He concluded that the SHS thickness is determinant for the behaviour of the joint, especially concerning ductility, ultimate resistance and initial stiffness. Furthermore, the study highlighted that in simple endplate joints whose SHS thickness is greater than 5 mm, the failure mode is the collapse of the HB’s sleeves due to shear and tensile forces originated by a bending moment. He also did a detailed study concerning the effect of the initial preload applied to the HB and concluded that it has a great impact on the global behaviour of the joints. Yet, there are still a lot of studies that need to be done to characterize the tensile behaviour of these bolts in steel endplate connections.
The numerical models presented in this paper follow the ones from Mesquita et al. [3]. Such models were performed using monotonic loads and compared against the experimental results discussed in [1], which agreement was found out to be very good. At that time, cyclic analyses were not in the scope of the study and therefore experimental cyclic tests were not performed. However, it is of major interest to investigate the dynamic response of connections using HB, namely because of their use in earthquake regions. Elghazouli et al. [4] studied the monotonic and cyclic behaviour of HB in angle connections between open beams and tubular columns. They concluded that the grade of the HB, coupled with the gauge distance between the HB and the beam flange, has a notable effect on the performance of the joint. The study highlighted that those connections exhibited stable hysteretic response with reasonable energy dissipation capabilities and considerable pinching effects. In addition, Tizani et al. [5] carried out a study using Extended Hollo-bolts (EHB) in concrete-filled columns with endplates under cyclic loading, concluding that during the cyclic loading tests, no damage was observed on the extension of the EHB and the overall performance of the connections was mainly influenced by their failure mode. Several authors have conducted similar studies, but little attention has been given to the tensile behaviour of the standard HB.
The main goal of this paper is to present a numerical study regarding the evaluation of the cyclic behaviour of steel joints using HB and endplates. These preliminary results serve as a basis for future experimental work whose main goal will be the experimental, numerical, and analytical evaluation of the cyclic response of these joints.
2 Cyclic Behaviour of Steel Joints
2.1 General Behaviour
Joints subjected to cyclic loading behave differently from joints under monotonic loads in a lot of different ways. The structural behaviour of steel joints under cyclic loads is characterized by hysteretic loops with progressive degradation of stiffness and strength. Stiffness degradation can usually be described as one of the following: the loading and unloading stiffnesses are equal and stiffness degrades as displacement increases; the loading stiffness decreases as a function of the displacement, while the unloading stiffness remains constant; the loading and unloading stiffnesses are different and degrade as a function of displacement. On the other hand, strength degradation occurs when a reduction in lateral strength is verified in a structural component due to cyclic load reversals. Cyclic strength degradation can be experienced in subsequent loading cycles as the level of plastic displacement increases, but also in subsequent cycles even if this level remains constant. This last case represents a system that experiences strength degradation because of a single level of inelastic displacement that is applied over time.
These two phenomena are often combined with pinching effects, which are characterized by large reductions in stiffness during reloading, followed by stiffness recovery when displacement is imposed in the opposite direction. Pinching is primarily caused in steel structures because of the opening and closing of gaps between plates in steel endplate connections. Stiffness increases when contact with the column is reintroduced at the compression side. The level of pinching depends on several factors such as the characteristics of the structure and the loading history. Figure 1a illustrates a comparison between stiffness and strength degradation and pinching effects in a real cyclic analysis.

Common hysteretic and envelope curves
It is important to mention that usually, the cyclic behaviour of steel joints follows the monotonic curve. In addition, the behaviour of a joint subjected to cyclic loading depends on the loading velocity, since the dislocation movement of the atoms present in the steel is influenced by inertial effects, which also influences the hardening rate [6]. However, this paper reports only on the quasi-static cyclic behaviour of the joints.
Besides the hysteretic loops, cyclic envelopes (skeleton curves) are often used to assess structural properties of the joints in study, such as ductility and stiffness. Figure 1b shows a simplified envelope created from a typical hysteresis curve. The envelope is characterized by showing an initial linear zone until yielding occurs, followed by a hardening one. Once the maximum value for the strength is reached, cyclic degradation takes place and produces a decrease in strength and stiffness.
2.2 Key Parameters for the Evaluation of the Cyclic Response
The cyclic response of a steel joint is characterized through different parameters. In a structural system deforming beyond its elastic limit, the energy imparted to the structure is dissipated by damping and yielding of the elements, which occurs due to the movement of many dislocations of atoms [6]. Most structures under intense earthquakes must be able to deform themselves well beyond the yield deformation limit to dissipate as much energy as possible. For the purpose of this research, the angular ductility coefficient \((\mu)\) is adopted to evaluate ductility that is essential for earthquake resistant structures. Two key parameters for describing the energy dissipation of the joints are addressed: the total energy dissipation \(({W}_{t})\) and the equivalent damping coefficient \(({\xi }_{e})\).
3 Numerical Investigation
3.1 Models and Loading Protocol
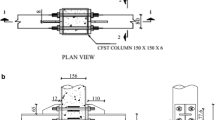
The specimens and monotonic results used in this numerical study are described in Mesquita [1] and Mesquita et al. [3]. Three specimens were chosen for the study based on different variables and characteristics. T01_1 uses a 200 × 200 × 8 mm SHS column and HBM16 bolts, whereas T01_3 uses the same column but HBM20 bolts (Fig. 2). T02 uses a 200 × 200 × 12 mm SHS column and HBM20. In all cases, flush endplates were used.

T01_3 and HBM20 views
The loading protocol adopted is based on the ECCS-45 [7] and presented in Fig. 3b. The yielding displacement was found for each joint using the monotonic results described in Mesquita [1] and the methodology of Fig. 3a. The loading protocol was applied using displacement control one meter away from the SHS, on the beam’s span.

ECCS-45 procedure to establish the loading protocol, [7]
In total, 39 half-cycles were applied. Table 1 indicates the yielding \(({\delta }_{y};{F}_{y})\) and ultimate \(({\delta }_{u};{F}_{u})\) displacement/force of the specimens obtained from the monotonically loaded tests.
3.2 Material Properties
Due to reversal cyclic load, steel’s plastic behaviour is different from the monotonically loaded specimens since cyclic plasticity is dependent on the load history.
When modelling a cyclic behaviour response, two mechanisms need to be considered: isotropic and kinematic hardening. Among other options, Ansys allows specifying either bilinear or multilinear kinematic hardening models. These models permit to simulate the Bauschinger effect, which is a phenomenon in which the predicted stress–strain response is sensitive to the grain aspect ratio and the grain boundaries originate resistant stress that forbids subsequent nucleation at the dislocation sites. The result is a reduction in yield strength in the opposite direction.
The material properties for the used steel elements are detailed in Mesquita [1] and summarized in Mesquita et al. [3].
3.3 Numerical Simulations
Mesh sensitivity studies were performed to obtain great accuracy while maintaining a reasonable computational cost. Also, symmetrical boundary conditions were taken into consideration in all models. The key setting parameters (mesh size, contact elements, advanced settings, etc.) for the numerical simulations are described in Mesquita et al. [3] and 3D solid hexahedric elements (SOLID186) with uniform reduced integration and large deflection options applied were used. In addition, mesh size and contact definitions can contribute to some differences between the numerical and experimental behaviour of the specimens. There was a slight contact penetration in all models (due to the penalty formulation used) and convergence issues between the bolt legs and the SHS often arose, leading to corrective actions, such as lowering the normal stiffness factor and adjusting advanced specific formulations.
As stated in Mesquita [1] and Mesquita et al. [2], a bolt pretension was applied on both HBM16 and HBM20 using a torque of 190 Nm (HBM16) and 500 Nm (HBM20).
T01_1.
The numerical simulation was able to run until λ = 22, stopping there due to excessive stresses and deformations on the bolts’ sleeves. This outcome follows the conclusions presented in Mesquita [1] and Mesquita et al. [3] for the monotonic tests, where is stated that the HB is responsible for the integrity of the joint and typically its legs are the first component to enter in failure due to high shear and tensile forces.
T01_3.
The model reached the last cycle without failure of any component. As expected, the bolts exhibited higher stresses in the edge limiting the opening of the legs. In addition, the last unloading shows a clear deformation on the SHS originated due to cumulative plastic deformations in opposite directions, Fig. 4b.
T02.
The solving process of this model was almost identical the one of T01 since the numerical simulation stopped at λ = 22 due to excessive stresses and deformations on the HB’s sleeves (Fig. 4c). As expected, this model exhibited low deformations on the SHS face and its stresses were lower compared to the SHS of T01_3.

Numerical simulations of the specimens
Figure 5 presents the moment-rotation diagram for the mentioned specimens. There is a clear strength degradation, while pinching effects are observed in all specimens. Moreover, the unloading stiffness is similar to the initial one when suddenly reduces and cuts across inside the moment-rotation envelope until regaining stiffness again.

Hysteretic, envelope and monotonic [1] curves of the specimens
The shape of the hysteretic curves of Fig. 5 agrees with the experimental observations made by France [8] concerning the cyclic behaviour of blind-bolted joints. He compared both path and properties of the hysteretic curve of a blind-bolted connection against the behaviour of a typical joint using an open section column.
4 Results
Based on the results obtained, a MATLAB script was elaborated to calculate the key parameters mentioned before and indicated in Fig. 6. The damping coefficient was calculated based on the first cycle of each drift for the specimens. The angular ductility coefficient was calculated using the displacement at which the solution process stopped (unless for specimen T01_3, which only conclusion concerning \(\mu\) is that is greater than 10), and the cumulative energy dissipation is the cumulative sum of the energy dissipated in every cycle in each drift. This parameter is highly influenced by the loading protocol adopted, the number of cycles performed and the joint’s ductility.

Key parameters for the evaluation of the hysteretic response of the specimens
5 Conclusion
Three steel endplate joints using either HBM16 or HBM20 were numerically tested under quasi-static cyclic loading. The primary conclusions are:
-
1.
All models exhibited pinching effects and strength degradation. The shape of the hysteretic curves agrees with previous literature. Future work will evaluate the factors that mainly influence this shape, such as the column’s cross-section.
-
2.
The models T01_1 and T02 were not able to pass beyond half-cycle 22. Both models presented the same failure mode, the collapse of the HB’s sleeves.
-
3.
All models exhibited similar \({\xi }_{e}\) values. However, T01_3 ones are the largest among them, indicating that the HBM20 has a positive influence regarding energy dissipation against the HBM16. Also, T02 showed lower \({\xi }_{e}\) values than T01_3, which suggests that an increase in the wall thickness has no improvement in the energy dissipation capability for these types of connections.
-
4.
T02 shows a greater initial stiffness than the other specimens, showing that the wall thickness has a major effect on this parameter, as stated in Mesquita [1].
-
5.
The yielding displacement of the specimens exhibits a great influence on the loading protocol adopted and therefore on the results obtained. As mentioned in Mesquita [1] and Mesquita et al. [2], ductility is greatly affected by the pretension force applied to the bolt. T01_3 is the most ductile specimen and was the only one that resisted all cycles imposed. This helps to justify the difference regarding the cumulative energy dissipation, while the \({\xi }_{e}\) values remain identical. As expected, ductility plays an important role in the amount of energy dissipated.
Based on these conclusions, it is possible to claim that the numerical models predict the actual behaviour of the joints with a reasonable degree of certainty. However, the connections presented here are not suitable for high seismicity zones, due to their weakness under large moments. This happens not only because of the HB’s sleeves but especially due to the membrane behaviour tendency that characterizes the SHS, as indicated in Mesquita [1]. This research area has a lot of potential for expansion and further investigation involving experimental, numerical, and analytical studies will be carried out to propose new design methods with non-concrete-filled tubular sections and hollo-bolts that follow the earthquake design requirements.
References
Mesquita A (2019) Three-dimensional behaviour of I beam-SHS column joints with hollo-bolts subjected to monotonic loads. Ph.D. thesis, University of Coimbra
Mesquita A, Simões da Silva L, Jordão S (2010) Behaviour of I beam-SHS column steel joints with hollo-bolts: an experimental study. In: Tubular structures XIII, Hong-Kong
Mesquita A, Simões da Silva L, Jordão S (2021) 3D numerical models of steel joints with hollo-bolts – A comparison with experimental results. In: Modern trends in research on steel, aluminium and composite structures, Taylor and Francis, pp 328–334
Elghazouli AY, Málaga-Chuquitaype C, Castro JM et al (2009) Experimental monotonic and cyclic behaviour of blind-bolted angle connections. Eng Struct 31:2540–2553
Tizani W, Wang Z, Hajirasouliha I (2013) Hysteretic performance of a new blind bolted connection to concrete filled columns under cyclic loading: an experimental investigation. Eng Struct 46:535–546
Smith WF, Hashemi J (2018) Foundations of materials science and engineering, 6th edn. McGraw-Hill Education, London
European Convention for Constructional Steelwork (1986) Recommended testing procedure for assessing the behaviour of structural steel elements under cyclic loads, No 45
France JE (1997) Bolted connections between open section beams and box columns Ph.D. thesis, University of Sheffield
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
de Mesquita, A.T.B., de Mesquita, A.B. (2022). Numerical Study of the Quasi-static Cyclic Behaviour of Blind-Bolted Connections. In: Mazzolani, F.M., Dubina, D., Stratan, A. (eds) Proceedings of the 10th International Conference on Behaviour of Steel Structures in Seismic Areas. STESSA 2022. Lecture Notes in Civil Engineering, vol 262. Springer, Cham. https://doi.org/10.1007/978-3-031-03811-2_21
Download citation
DOI: https://doi.org/10.1007/978-3-031-03811-2_21
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-03810-5
Online ISBN: 978-3-031-03811-2
eBook Packages: EngineeringEngineering (R0)