
Abstract
The research project Rovitis 4.0 was aimed to design and develop two prototypes of robot, connected to a Decision Support System (DSS), capable of automatically spraying vineyards. Through these machines a safer application of pesticides is possible, allowing operators to maintain distance from the application zone and during the preparation of the phytoiatric mixture and reducing the use of plant protection products by a variable rate precision spraying system. During the three-year activity of the project, several parameters have been tested, such as: safety and performance of the autonomous driving system; effectiveness of the correct robot-DSS interaction; effectiveness and quality of robotic treatments; economic sustainability and environmental benefits of the innovation. The first prototype of robot, thanks to the development of an autonomous drive system, was able to operate alone through the entire 2020 season. The second prototype was equipped with the precision spraying system based on vegetation recognition. It was able to instantaneously adapt the spraying to the size and position of the target, allowing a 43% reduction of copper-based products in the 2020 season. The overall results showed that a robotic management of the vineyard can lead to environmental and economic advantages even for medium size farms. This paper describes the features of the robots and shows the main findings obtained during the testing of the machines.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Over the course of history, mechanization and automation increased crop output numerous orders of magnitude. Nowadays, advancements in the domain of robotics can significantly accelerate this trend (Fountas et al. 2020; Oliveira et al. 2021).
Agricultural robots are autonomous or semi-autonomous systems that can be operated in several stages of the process (Siciliano and Khatib 2016) and the central purposes for computerization of crops are reducing the time and effort required for performing cultivation practices and improving the efficiency in the use of inputs in agriculture. Robotization can be considered the most advanced chapter of digital and precision agriculture (Pallottino et al. 2018).
Spraying pesticides to protect plants from pests and diseases is a common agricultural practice that requires time, readiness of execution and technical competences. In this case, robots can significantly increment the performance and the safety of this operation, avoiding repetitive and demanding activities, reducing the workload, the need for manpower and the contact with substances and contaminated equipment. This allows the repositioning of human labor on other activities (Marinoudi et al. 2019).
Some robots devoted to crop spraying have been realized in the last years, but most of them have remained just in a prototypal stage (Jian-Sheng 2014; Gonzalez-de-Santos et al. 2017; Danton et al. 2020; Chaitanya et al. 2020), and practically no solutions are at present available on the market. Furthermore, even fewer findings are available on spraying vineyards (Oberti et al. 2016; Cantelli et al. 2019).
In this context, the project (Rovitis 4.0 n.d.) aimed to develop two prototypes of robot capable of autonomously spraying the vineyards with precision application of plant protection products. This paper describes the features of the robots and shows the main results obtained during their testing. The project based on a previous activity funded by Regione del Veneto (Dodich project n.d.) and leaded by “Azienda Agricola Giorgio Pantano S.s.”.
2 Material and Methods
2.1 The Research Group
At the beginning of the project, an Operational Group (O.G.) funded by Regione del Veneto in the framework of the European Innovation Partnership (EIP-AGRI n.d.) was formed. The O.G. includes two viticultural farms, three research partners, two technological companies, and a union of agricultural producers. The O.G. leader was the farm “Azienda Agricola Giorgio Pantano”. The project lasted three years.
2.2 Field Test Sites
The field evaluation of the performance of the two prototypes was carried out at “Azienda Giorgio Pantano” in the province of Padua \( ({{45}}^{\circ} {{13}}^{\prime} {{35}}{.}{{18}}^{\prime\prime}{{N 11}}{\circ} {{59}}^{\prime} {{2}}{.}{{7}}0^{\prime\prime}{{E}} ) \), under conventional management and at “Terre Grosse Soc. Agr. S.s.” in the province of Treviso \( ( {{45}}{\circ} {{4}}0^{\prime} {{27}}{.}{{72}}^{\prime\prime}{{N 12}}{\circ} {{29}}^{\prime} {{25}}{.}{{54}}^{\prime\prime}{{E}} ) \), under organic farming. The vineyard varieties were Glera in the first farm, and Sauvignon and Manzoni bianco in the second farm.

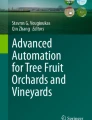
The first prototype (1), operating at “Azienda Giorgio Pantano”, in the configuration of the first year of activity; the second prototype, operating at “Terre Grosse” (2) with the stereo cameras for canopy inspection (3) and the Pulse Width Modulation (PWM) nozzles (4).
2.3 Development of Prototypes
A self-propelled tracked vehicle was prototyped by a partner company as electro-mechanical platform for the robot. The vehicle mounts a diesel engine of 28.2 kW and has a total mass of 1000 kg. It transports all the hardware components, with ad hoc electronics developed for the control of the machine, sensors and the spraying unit (Fig. 1). The decision for this configuration was driven by the initial findings on autonomous driving in vineyards achieved by previous research projects and research activities done in the framework of the “Dodich” project. Such initial findings included but were not limited to: need of a small platform with skid-steer drive and adequate power provided by a propulsion unit (e.g., diesel engine), autonomous navigation based on fusion of sensor data coming from laser scanners, Inertial Measurement Units (IMU) and wheel encoders and a cascade control algorithm (Fig. 2).

The initial prototype developed by “Azienda Giorgio Pantano” in previous research projects.
An autonomous navigation software and an image analysis software have been developed for the autonomous driving of the prototype, as well as for the recognition of vegetation and the spraying of plant protection products at variable rates. The prototype was equipped with an integrated safety system for stopping or turning off the machine in case of dangerous situations.
The equipment was connected to the cloud, both for remote control and for the interaction with a Decision Support System (DSS), made available by a partner, getting operational suggestions and integrating the information collected by the on board sensors. In this way it is possible to program the specific activities to be carried out by the robot, in an integrated manner with the forecast models and with various agricultural operations. During the initial phase of the prototype development, thanks to the use of the old Dodich platform (Fig. 2) and the ROS system (Robot Operating System), new driving algorithms were implemented and tested. Those included: localization, path planning and a cascade control. For the localization an approach based on sensor fusion of data coming from IMUs, wheel encoders, LIDAR sensor (i.e., 3D laser scanner) and a single GPS (Global Positioning System) RTK (Real Time Kinematic) receiver was used. For the path planning, an approach based on a global plan and a local plan was employed. Through this strategy, on one hand, the global plan was used to elaborate driving strategies (i.e., trajectories) which included fixed obstacles, on the second hand, the local plan was used to modify the initial trajectories to account also for temporary obstacles as proposed by Lin et al. (2009). For the cascade control, the trajectories elaborated by the planners were then translated to linear and angular velocities, afterwards those were then sent to the Electronic Control Unit (ECU) and electrical commands were elaborated to move the vehicle. Through this architecture the robot was able to proceed autonomously from the shelter station, move to the vineyard, perform the phytosanitary treatment and return to the shelter, correctly recognizing the operating environment.
In the second year of activity, an alternative autonomous driving system was also developed and tested on the second prototype. It entails the use of stereo cameras and image processing software based on artificial intelligence, which, in addition to the three-dimensional reconstruction of the environment, realizes the semantic analysis (therefore with the ability to distinguish people, ditches, walkable paths, obstacles, vegetation, etc.) of the workspace. The large computing capacity required for this type of processing did not allow a complete field test of this system, which will be carried out in the next future after a hardware upgrade process.
In addition to the ability to drive autonomously, the issue of reducing the environmental impact was addressed by developing a variable rate precision spraying system. It is based on the use of special stereo cameras mounted on the front of the robot (Fig. 1), which frame the vegetative wall on both sides and allow, through an image analysis software, to recognize the presence of the canopy and computing its size in terms of volume and projected area, then estimating through an algorithm the total framed leaf area. Based on this information, the flow of the phytoiatric mixture is modulated in real time at the level of a single nozzle, thanks to the use of Pulse Width Modulation (PWM) nozzles (Teejet) (Fig. 1).
The precision spraying unit adopted a dynamic system to continuously regulate the distance of the bars with the nozzles from the vegetation, allowing a more precise targeting of the canopy at an optimal distance.
This robot is also equipped with a PPPs (plant protection products) automatic mixing and injection apparatus (patent pending), providing an on-line mixing of different phytoiatric products (contained as concentrated solution in four tanks) directly on the machine, based on a system of peristaltic pumps connected to a 200 L tank containing clean water.
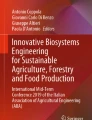
As an alternative to the on board mixing, a station for automatic refilling the robot with PPPs and water without the presence of the operator was also prototyped. The station was entailed by a robot gantry system which, through the usage of object recognition was able to move to the target location by solving the inverse kinematics through the camera parameters. Moreover, an injection apparatus based on the Bernoulli principle (patent-pending) was integrated for mixing also of power based PPPs (Fig. 3).

The prototype of autonomous refilling developed by “Azienda Giorgio Pantano”. The system was composed of a gantry system with cameras (1), an intelligent system based on image processing to calculate end-positions for the robot (2a–b), and a mixing solution based on the Bernoulli principle for powders and liquids (3).
2.4 Evaluation of Economic Feasability and Environmental Benefits
Another part of the project regarded the assessments of the operational effectiveness in the field and of the economic convenience in various scenarios characterized by different investment costs, company size and vineyard management systems.
To represent the degree of environmental pressure due to the pesticides use, the PIC indicator (Potential Impact Class, ARPA Toscana) on water, environment and health (Franchi 2017; Bolzonella et al. 2019) was used.
2.5 Evaluation of the Efficacy and Quality of Treatments
In the third year of activity, the experimental design for the evaluation of the efficacy of the phytosanitary protection entailed three experimental plots: the first treated with the robot, the second treated with the conventional air-blast sprayer and the third not treated. This scheme was replicated in the two farms and the observations were conducted during one complete vegetative season. Every treatment was carried out on the same day and with the same PPPs in the two experimental farms, using the conventional sprayers and the robots.
The development of the main fungal diseases (downy mildew and powdery mildew) was assessed in the two partner farms. On leaves and grapes, the following elements were periodically evaluated: 1) first symptoms of the disease; 2) count of new organs affected by downy mildew; 3) evaluation, in some phenological phases, of the disease indices.
Meteorological data were recorded during the vegetative season.
Regarding the quality of distribution of the robots, water sensitive papers (WSP) were used (Otto et al. 2015; Biocca et al. 2021). In the first year of research, tests aimed to evaluate treatments performed at high and medium volume application rate, were carried out in the conventional farm (Pantano). The tests were replicated during the third year, evaluating the first prototype with a modification of the spraying group and the second prototype with the variable rate system operating in the organic farm (Terre Grosse).
3 Results and Discussion
The Rovitis 4.0 Project represents a tangible demonstration of the effectiveness of the EIP-AGRI partnership which assembles partners with various complementary skills and experiences, allowing the development and the implementation of the innovation.
As overall result, in the first farm (“Azienda Giorgio Pantano”) the first prototype carried out autonomously the total of 13 scheduled treatments with fungicides during the 2020 season in the experimental plot. Moreover, through the layered autonomous driving control architecture the old Dodich machine was retrofitted for operation, thus demonstrating the interoperability of the autonomous navigation system architecture.
As for the second prototype (operating in the “Azienda Terre Grosse”) the use of the variable rate system was remarkable. Considering all the treatments, the innovative system allowed to save 43% of the total quantity of the applied copper-based products, compared to the standard management.
The first evaluations on the execution times by the autonomous vehicles showed longer working times for the robot due to its lower speed compared to the company tractor. The speeds were subsequently increased to 4 km h−1 and there is the prospect of equating the speed of the tractor in future versions. The maximum robotic surface with one unit is currently 20 hectares in a single body, due to instrumental limits. These limits can possibly be overcome with the combined and coordinated use of multiple machines (fleets of robots).
Regarding the assessments of the impact of the robot use on the environment, water and human health, the PIC indicator identified a positive reduction of this index (Table 1). Effects are evaluated on a scale with a range from 1 (little impact) to 5 (very impactful). The compartment PIC related to environment, water and heath was calculated by averaging the sum of the PIC of the active principles used on the basis of the farm register of treatments.
The analysis highlights in general an average level of PIC for water and environment and medium-low level for health.
Higher values in the organic vineyards for water and environment compartments are the consequence of a greater use of substances that bioaccumulate. The PIC values for all fields with innovation are lower thanks to the reduction in the dosages of plant protection products obtained with the dynamic atomizer.
Considering the savings of phytosanitary products in conventional and organic experimental vineyards, the economic feasability of the innovation was assessed, considering different levels of investment in the robot purchase between 30′000 and 150′000 euros with a life span of the machine of 10 years.
Table 2 reports the payback time of different level of investment (euros) and surface (hectares) in conventional and organic vineyards. The payback time has been calculated comparing the vineyards management costs of Rovitis 4.0 with subcontractor services.
In the simulations we assume a number of phytosanitary treatments of 13 per year for conventional vineyards and 20 in organic vineyards. A cost of phytosanitary distribution by subcontractor equal to 50 euros per treatment. An annual cost of plant protection products of 750 euros per hectare for conventional vineyards and 600 euros per hectare for organic vineyards.
As for phytosanitary protection, the untreated plots of Sauvignon, Manzoni bianco and Glera were affected by downy mildew, with diffusion index values between 85 and 100% at the end of the season. In contrast, in the theses treated with the robots the leaves and grapes resulted healthy, similarly to those treated with the farm conventional sprayer. The situation of substantial uniformity of the results was also confirmed with the surveys on the production, estimated with samples at harvest, both in quantitative (kg grapes per vine) and qualitative terms (sugar content, pH, total acidity, malic acid, tartaric acid). From the analysis of the data collected, no significant differences were highlighted between the theses, except for some slight deviations in a few qualitative parameters of little practical relevance.
Regarding the quality of distribution assessed with the WSP, at the Pantano farm, the new configuration of the machine, with the arrangement of the nozzles vertically and not arched and with an application rate of 750 L ha−1 showed the best results. The prototype tested at the Terre Grosse farm, with active variable rate and on line PPPs mixing and injection has allowed on the one hand a consistent reduction in the quantity of product compared to the conventional sprayer thesis, on the other hand it has highlighted some spots with insufficient supply of product, especially in the lower part of the canopy. It is expected to easily overcome these problems with the improvement of the synchronization of the nozzle control with the advancement of the machine and/or with the adoption of nozzles with a higher spray angle, to take advantage of the partial overlap of spray plumes. However, these critical issues had minimal repercussions from perspective of phytosanitary protection, which in any case was comparable to treatments performed in the traditional way.
4 Conclusions
Rovitis 4.0 promises to be an important solution for the near future in order to ensure sustainability for companies in the medium term. This will require increasingly targeted and timely interventions for being able to conduct a more efficient crop protection and at the same time less impacting on the environment. The balance of the first observations was therefore decidedly encouraging and stimulating further experimentation, to confirm, in different years and locations, what was observed in the preliminary tests. The activities carried out and the results achieved by the operating group of the Rovitis 4.0 Project represent an important starting point for future lines of research, where to further develop the design idea of a robot for viticulture, also considering the fast evolution of components and of research.
In conclusion:
-
The use of robots increased work safety allowing the operators to maintain distance from both the application zone and during the mixture preparation, thanks to the on board mixing and injection system or, as an alternative, the station for automatically refilling the robot with PPPs and water.
-
In the experimental test conditions, the plots treated with the two prototypes showed no significant differences in fungal disease development in comparison with the plots treated with a conventional sprayer.
-
Economic evaluation shows that with an investment from \(30^{\prime}000\) to \(150^{\prime}000\) euros (and a return of investment of at most 5 years), thanks to saving in distribution by subcontractor costs and pesticides costs, Rovitis 4.0 is convenient starting from 10 to 30 hectares of vineyard surface. Furthermore, it is necessary to take in account that the considered level of investment, given considering current costs, will lower in the next future thanks to technological progress and in the view of an industrialization of the production.
-
A reduction of the PIC indicator indicates a positive effect of the innovation on the environment and human health.
-
The Rovitis 4.0 Project also represents a tangible demonstration of the effectiveness of the Operational Group PEI-AGRI partnership.
References
Biocca, M., Cutini, M., Romano, E., Pallottino, F., Gallo, P.: Evaluation of drift-reducing nozzles for pesticide application in hazelnut (Corylus avellana L.). AgriEngineering 3(2), 230–239 (2021)
Bolzonella C., Lucchetta M., Teo G., Boatto V., Zanella A.: Is there a way to rate insecticides that is less detrimental to human and environmental health? Glob. Ecol. Conserv. 20, e00699 (2019)
Cantelli, L., Bonaccorso, F., Longo, D., Melita, C.D., Schillaci, G., Muscato, G.: A small versatile electrical robot for autonomous spraying in agriculture. AgriEngineering 1(3), 391–402 (2019)
Chaitanya, P., Kotte, D., Srinath, A., Kalyan, K.B.: Development of smart pesticide spraying robot. Int. J. Recent Technol. Eng. 8(5), 2193–2202 (2020)
Danton, A., Roux, J.C., Dance, B., Cariou, C., Lenain, R.: Development of a spraying robot for precision agriculture: an edge following approach. In: 2020 IEEE Conference on Control Technology and Applications (CCTA), pp. 267–272 (2020)
Dodich project. http://www.ethics.it/dodich/. Accessed 25 Sept 2021
EIP-AGRI. https://ec.europa.eu/eip/agriculture/en. Accessed 25 Sept 2021
Fountas, S., Mylonas, N., Malounas, I., Rodias, E., Hellmann Santos, C., Pekkeriet, E.: Agricultural robotics for field operations. Sensors 20(9), 2672 (2020)
Franchi, A.: Pesticides class of potential impact – CIP. An indicator to drive sustainable choices, p. 34. ARPA Toscana, Firenze (2017)
Gonzalez-de-Santos, P., et al.: Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 18(4), 574–614 (2016). https://doi.org/10.1007/s11119-016-9476-3
Jian-sheng, P.: An intelligent robot system for spraying pesticides. Open Electr. Electron. Eng. J. 8(1), 435–444 (2014)
Lin, Y.C., Chou, C.C., Lian, F.L.: Indoor robot navigation based on DWA*: velocity space approach with region analysis. In: 2009 ICCAS-SICE, pp. 700–705. IEEE (2009)
Marinoudi, V., Sørensen, C. G., Pearson, S., Bochtis, D.: Robotics and labour in agriculture. A context consideration. Biosyst. Eng. 184, 111–121 (2019)
Oberti, R., et al.: Selective spraying of grapevines for disease control using a modular agricultural robot. Biosys. Eng. 146, 203–215 (2016)
Oliveira, L.F.P., Moreira, A.P., Silva, M.F.: Advances in agriculture robotics: a state-of-the-art review and challenges ahead. Robotics 10(2), 52 (2021)
Otto, S., Loddo, D., Baldoin, C., Zanin, G.: Spray drift reduction techniques for vineyards in fragmented landscapes. J. Environ. Manag. 162, 290–298 (2015)
Pallottino, F., Biocca, M., Nardi, P., Figorilli, S., Menesatti, P., Costa, C.: Science mapping approach to analyze the research evolution on precision agriculture: world, EU and Italian situation. Precis. Agric. 19, 1011–1026 (2018)
Rovitis 4.0. http://www.rovitisveneto.it. Accessed 25 Sept 2021
Siciliano, B., Khatib, O.: Handbook of Robotics. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-32552-1
Acknowledgements
Research funded by Regione del Veneto, P.S.R. 2014–2020, Operational Group Project “Rovitis 4.0” for the deployment of an autonomous robot connected to a DSS for a sustainable and efficient management of the vineyard.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Biocca, M. et al. (2022). Rovitis 4.0: An Autonomous Robot for Spraying in Vineyards. In: Biocca, M., Cavallo, E., Cecchini, M., Failla, S., Romano, E. (eds) Safety, Health and Welfare in Agriculture and Agro-food Systems. SHWA 2020. Lecture Notes in Civil Engineering, vol 252. Springer, Cham. https://doi.org/10.1007/978-3-030-98092-4_19
Download citation
DOI: https://doi.org/10.1007/978-3-030-98092-4_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-98091-7
Online ISBN: 978-3-030-98092-4
eBook Packages: EngineeringEngineering (R0)