
Abstract
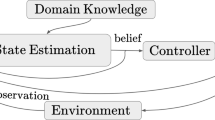
Augmented Localization with Obstacle Tracking (ALOT) is a pipeline for localization, involving closed-loop feedback between an obstacle tracker and a particle filter localization. The tracker tracks and labels dynamic obstacles it sees and uses historic information to predict positions of dynamic obstacles at the current time-step. Following up on this, the tracker uses the current observation along with predicted obstacle positions to proposes ego poses for localization. The localization method in ALOT employs a particle filter. During scan matching, it removes dynamic obstacles from the scan using information obtained from the tracker. Particles are weighted once during scan matching, and a second time with ego-pose proposals provided by the tracker. Upon reconstructing the ego-pose belief, the particle filter localization provides a feedback to the tracker with the most likely ego-pose to allow the tracker to update its tracking and further propose ego-poses at the next time-step. ALOT is tested on real-world data collected in a laboratory. In low to moderately dynamic environments, it achieves an average positional and heading errors of 0.171 m and 1.63\(^\circ \) respectively. When run in larger crowds, ALOT has positional and heading errors of 0.467 m and 4.784\(^\circ \).
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Montemerlo, M., Thrun, S., Koller, D., Wegbreit, B.: FastSLAM: a factored solution to the simultaneous localization and mapping problem. In: Eighteenth National Conference on Artificial Intelligence, Edmonton, Alberta, Canada, July 2002, pp. 593–598 (2002)
Zhang, J., Singh, S.: LOAM: lidar odometry and mapping in real-time. In: Robotics: Science and Systems Conference (RSS), July 2014
Mur-Artal, R., Montiel, J.M.M., Tardos, J.D.: ORB-SLAM: a versatile and accurate monocular SLAM system. IEEE Trans. Rob. 31(5), 1147–1163 (2015)
Julier, S.J., Uhlmann, J.K.: A new extension of the Kalman filter to nonlinear systems. In: Signal Processing, Sensor Fusion, and Target Recognition VI, pp. 182–193 (1997)
Fox, D.: Adapting the sample size in particle filters through KLD-sampling. Int. J. Robot. Res. 22(12), 985–1004 (2003)
Fox, D., Burgard, W., Dellaert, F., Thrun, S.: Monte Carlo localization: efficient position estimation for mobile robots. In: National Conference on Artifical Intelligence (AAAI), Orlando, Florida, USA, July 1999, pp. 343–349 (1999)
Fox, D.: KLD-sampling: adaptive particle filters. In: Advances in Neural Information Processing Systems, pp. 713–720. British Columbia, Canada, Jan, Vancouver (2001)
Guan, R.P., Ristic, B., Wang, L., Palmer, J.L.: KLD sampling with Gmapping proposal for Monte Carlo localization of mobile robots. Inf. Fusion 49, 79–88 (2019)
Wasisto, I., Istiqomah, N., Trisnawan, I.K.N., Jati, A.N.: Implementation of mobile sensor navigation system based on adaptive Monte Carlo localization. In: 2019 International Conference on Computer, Control, Informatics and its Applications: Emerging Trends in Big Data and Artificial Intelligence, IC3INA 2019, Tangerang, Indonesia, October 2019, pp. 187–192 (2019)
Li, A.Q., Xanthidis, M., O’Kane, J.M., Rekleitis, I.: Active localization with dynamic obstacles. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2016, pp. 1902–1909 (2016)
Menegatti, E., Pretto, A., Scarpa, A., Pagello, E.: Omnidirectional vision scan matching for robot localization in dynamic environments. IEEE Trans. Rob. 22(3), 523–535 (2006)
Sahdev, R., Chen, B.X., Tsotsos, J.K.: Indoor localization in dynamic human environments using visual odometry and global pose refinement. In: 2018 15th Conference on Computer and Robot Vision (CRV), pp. 360–367 (2018)
Choi, B.S., Lee, J.J.: Localization of a mobile robot based on an ultrasonic sensor using dynamic obstacles. Artif. Life Robot. 12, 280–283 (2008)
Redmon, J., Farhadi, A.: YOLOv3: an incremental improvement. arXiv:1804.02767 [cs], April 2018
Bochkovskiy, A., Wang, C.-Y., Liao, H.-Y.M.: YOLOv4: optimal speed and accuracy of object detection. arXiv:2004.10934 [cs, eess], April 2020
Ren, S., He, K., Girshick, R., Sun, J.: Faster r-CNN: towards real-time object detection with region proposal networks. http://arxiv.org/abs/1506.01497
Wojke, N., Bewley, A., Paulus, D.: Simple online and realtime tracking with a deep association metric. arXiv:1703.07402 [cs], March 2017
Weng, X., Kitani, K.: A baseline for 3D multi-object tracking. arXiv:1907.03961 [cs], August 2019
Kalman, R.E.: A new approach to linear filtering and prediction problems. J. Basic Eng. 82(1), 35–45 (1960). https://doi.org/10.1115/1.3662552
Acknowledgement
This research was supported by the National Research Foundation, Prime Minister’s Office, Singapore, under its CREATE programme, Singapore-MIT Alliance for Research and Technology (SMART) Future Urban Mobility (FM) IRG. We also gratefully acknowledge the technical support of Nvidia Corporation through the Memorandum of Understanding with the Advanced Robotics Centre of the National University of Singapore on autonomous system technologies.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Li, Z., Kawkeeree, K., Chong, Y.L., Lee, C.D.W., Ang, M.H. (2022). ALOT: Augmented Localization with Obstacle Tracking. In: Ang Jr, M.H., Asama, H., Lin, W., Foong, S. (eds) Intelligent Autonomous Systems 16. IAS 2021. Lecture Notes in Networks and Systems, vol 412. Springer, Cham. https://doi.org/10.1007/978-3-030-95892-3_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-95892-3_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-95891-6
Online ISBN: 978-3-030-95892-3
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)