
Abstract
The first objective of this presentation is to show that it is possible to explain the cause of the pattern-induced bias (PIB) observed in displacement fields obtained by local DIC. A model is presented for this purpose. It gathers the different errors made when retrieving this displacement by minimizing the optical residual over subsets. It is shown that PIB predicted with this model and its counterpart observed with displacement fields obtained with DIC are in good agreement. When DIC is applied on periodic patterns like checkerboards instead of random speckles, it is observed that PIB becomes negligible. Such regular patterns are however not well suited for DIC. Hence it is recalled how to process such images by minimizing the optical residual in the Fourier domain instead of the spatial one. PIB is assessed in this case, and it is also observed that PIB is negligible in displacement maps obtained with such regular patterns processed by minimizing the optical residual in the Fourier domain.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Checkerboard
- Digital image correlation
- Pattern-induced bias
- Localized spectrum analysis
- Uncertainty quantification
15.1 Statement of the Problem
Quantifying the uncertainty in measurements obtained with DIC is a topical issue in the experimental mechanics community, certainly because this is an essential prerequisite before standardizing these techniques. There is a rather wide literature concerning random errors in DIC, in particular sensor noise propagation to the final displacement maps, [1] for instance. The systematic error caused by interpolation performed to express the deformed image in the coordinate system of the reference image is also the aim of many papers, [2] for instance. Another important systematic error is the so-called matching bias, which manifests itself by a “damping” of the actual details in displacement or strain maps. It can be regarded as the effect of a convolution of the true displacement with a low-pass Savitzky-Golay (SG) filter [3]. This latter result is quite satisfactory on average, but it does not account for the effect of the pattern involved in the determination of the displacement field. Indeed, the interplay between matching functions, actual displacement field, image gray level distribution, and its gradients causes spurious fluctuations to appear around the displacement field resulting from the aforementioned convolution. These spurious fluctuations can be regarded as a bias recently named pattern-induced bias [4, 5] (PIB). It induces a random distribution of “blobs,” which impair the displacement maps.
15.2 Model
PIB can be predicted as a function of various parameters, namely the speckle itself, its gradient, the difference between actual displacement field and its approximation by subset shape functions being the most influencing ones [6]. DIC consists in minimizing over subsets the following residual with respect to the set parameters λj j = 1..N, gathered in a vector denoted by Λ:
where ℐ is the reference image, \( \tilde{{\mathrm{\mathcal{I}}}^{\prime }} \) the deformed image, and Φ j, j = 1..N, the shape functions. λj, j = 1..N, are then used to describe the actual displacement fields within the subsets. Assuming that the images are not affected by noise, it has been demonstrated in [6] that at convergence of the minimization of the SSD function, vector Λ gathering the parameters returned by DIC was equal to the following quantity.
where the coefficient in row i and column j of matrice Lu is
This coefficient represents the projection of the image gradient on the shape functions. In Eq. (15.2), the first of the three terms is the set of parameters Λu that would be obtained by projecting the true displacement on the shape functions, but this true displacement remains generally unknown in practice. This vector is also the convolution of the true displacement by a SG filter [3]. E contained in the second term represents the projection of the deformed image gradient on the residual of the decomposition of the displacement over the basis of shape functions, and Dℐ′ in the third term is the subpixel interpolation error. The case of noisy images is also addressed in [6] but it is not discussed here for the sake of simplicity.
The model proposed here enables us to analyze the displacement field returned by DIC, including the effect of PIB. We choose a reference displacement containing a gently decreasing spatial frequency [7, 8] to illustrate PIB. The ability of the model above to predict this phenomenon is also illustrated, see Fig. 15.1 where various displacement fields are shown. PIB is indeed the difference between the displacement measured by DIC and the reference displacement field convolved by the SG filter corresponding to the subset used in DIC in terms of width and order of the matching function. The cross-sections of four displacement fields are depicted in this figure (bottom right). It can be seen that the red curve obtained with the model correctly predicts the main fluctuations of the blue curve obtained with DIC. The difference with the reference displacement convolved by the SG filter is significant, in particular at the left-hand side of the curve, thus for the highest spatial frequencies involved in the displacement field.

Top left: artificial speckle deformed through the reference displacement field shown at the top right. The displacement field returned by DIC (subset size: 21 pixels, first-order matching functions), the reference displacement field convolved by the corresponding Savitzky-Golay filter, and the displacement field retrieved by using by Eq. (15.2) are successively given. Bottom right: cross-section of the different displacement fields along the symmetry axis of these three maps
15.3 Case of Pariodic Patterns Like Checkerboard
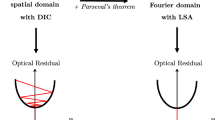
In [5, 9], it is shown that periodic patterns lead to a PIB which is negligible compared to the one found with random speckles. The problem is however that such periodic patterns are not well suited to DIC because of their periodicity. It is however worth mentioning that the minimization of the SSD function, usually carried out iteratively in the spatial domain with DIC, can advantageously be switched to the Fourier domain when periodic patterns are considered [9]. In this case, the minimization is quasi-direct, which also dramatically speeds up the calculations [10]. It can also be shown that the PIB discussed above becomes negligible when this minimization is performed in the Fourier domain with periodic patterns like checkerboards. Various examples will be given and discussed during the presentation to illustrate this result. The main limitation of this model is that the image gradient is involved in Eq. (15.2), and correctly assessing this quantity is difficult with real patterns used in experimental mechanics, the signal contained in numerical images being sampled.
References
Blaysat, B., Grédiac, M., Sur, F.: On the propagation of camera sensor noise to displacement maps obtained by DIC. Exp. Mech. 56(6), 919–944 (2016)
Schreier, H.W., Braasch, J.R., Sutton, M.: Systematic errors in digital image correlation caused by intensity interpolation. Optim. Eng. 39(11), 2915–2921 (2000)
Schreier, H.W., Sutton, M.A.: Systematic errors in digital image correlation due to undermatched subset shape functions. Exp. Mech. 42(3), 303–310 (2002)
Lehoucq, R.B., Reu, P.L., Turner, D.Z.: The effect of the ill-posed problem on quantitative error assessment in digital image correlation. Exp Mech. 2017, 1–13 (2017)
Fayad, S., Seidl, D.T., Reu, P.L.: Spatial DIC errors due to pattern-induced bias and grey level discretization. Exp. Mech. 60(2), 249–263 (2020)
Sur, F., Blaysat, B., Grédiac, M.: On biases in displacement estimation for image registration, with a focus on photomechanics. J Math Imag Vision. 63, 777–806 (2021)
Grédiac, M., Sur, F.: Effect of sensor noise on the resolution and spatial resolution of the displacement and strain maps obtained with the grid method. Strain. 50(1), 1–27 (2014)
2D Challenge 2.0 discussion document. https://sem.org/dicchallenge
Grédiac, M., Blaysat, B., Sur, F.: A critical comparison of some metrological parameters characterizing local digital image correlation and grid method. Exp. Mech. 57(6), 871–903 (2017)
Grédiac, M., Blaysat, B., Sur, F.: On the optimal pattern for displacement field measurement: random speckle and DIC, or checkerboard and LSA? Exp. Mech. 60(4), 509–534 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Society for Experimental Mechanics, Inc.
About this paper

Cite this paper
Sur, F., Blaysat, B., Grédiac, M. (2022). Which Pattern for a Low Pattern-Induced Bias?. In: Kramer, S.L., Tighe, R., Lin, MT., Furlong, C., Hwang, CH. (eds) Thermomechanics & Infrared Imaging, Inverse Problem Methodologies, Mechanics of Additive & Advanced Manufactured Materials, and Advancements in Optical Methods & Digital Image Correlation, Volume 4. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-030-86745-4_15
Download citation
DOI: https://doi.org/10.1007/978-3-030-86745-4_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-86744-7
Online ISBN: 978-3-030-86745-4
eBook Packages: EngineeringEngineering (R0)