
Abstract
Fall among older people is a major medical concern. Fall Detection Systems (FDSs) have been actively investigated to solve this problem. In this sense, FDSs must effectively reduce both the rates of false alarms and unnoticed fall. In this work we carry out a systematic evaluation of the performance of one of the most widely used machine learning supervised algorithm (Support Vector Machine) when using different input features. To evaluate the impact of the feature selection, we use Area Under the Curve (AUC) of Receiver Operating Characteristic (ROC) Curve as the performance metric. The results showed that with four features it is possible to obtain acceptable values for the detection of falls using accelerometer signals obtained from the user’s waist. In addition, we also investigate if the impact of selecting the features based on the analysis of a dataset different from the final application framework where the detector will be operative.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Fall detection system
- Supervised algorithm
- Accelerometer
- Wearables
- Support vector machine
- Feature selection
1 Introduction
The World Health Organization (WHO) has estimated a growth in the number of people over 60 years of age worldwide who annually suffer a fall from 688 million in 2006 to two billion by 2050 [1]. Falls are one of the main causes of morbidity and mortality among elderly as they can provoke from damage to wrists to hip fractures or even traumatic brain injuries [2].
Automatic Fall Detection Systems (FDSs) are being actively investigated in order to solve this problem. An FDS can be defined as a binary classification system which must constantly decide if the movements executed by the subject under monitoring correspond to a possible fall or if, instead, they are originated by conventional Activities of Daily Living (ADLs).
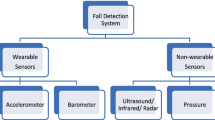
The FDSs are traditionally categorized into two groups: context-aware and wearable-based. The first group utilizes image analysis from video-camera recording, Kinect-like devices and/or other environmental sensors, such as pressure sensors or acoustic sensors. Context-aware methods present not-negligible installation and service costs as well as remarkable operational limitations due to privacy issues, camera blind spots, low device video resolution, little lighting and other visual artifacts [3]. In contrast, wearable FDSs can be transported as an extra garment or seamlessly integrated via software into conventional personal devices (such as smartwatches or even smartphones).
Due to the difficulties of systematically testing a FDS with actual falls experienced by elderly people, current FDS prototypes are typically trained, shaped and evaluated based on the movements (in particular, mimicked falls) normally generated in a controlled laboratory environment. This aspect makes us question the effectiveness of a certain FDS not only when it is applied on real world falls but also when it is extrapolated to detect falls with a dataset different from that used to configure the classifier.
FDS algorithms can be grouped into threshold-based techniques and detectors implemented on supervised learning or Machine Learning (ML) strategies. One of the issues for FDSs based on thresholds is finding an appropriate value for the threshold able to accurately differentiate falls from ADLs [4]. Therefore, supervised learning algorithms are commonly preferred. In this regard, a key element for the definition of any supervised learning is the election of the features with which input data are characterized.
This work carries out a systematic evaluation of the impact of the selection of the input features. The goal is to assess if the selection of features based on the analysis of a certain dataset is a good choice when a different dataset (with different movements and users) is considered. For this purpose, the study focuses on the behavior of a popular machine learning algorithm (Support Vector Machine -SVM-) when it is applied to several public datasets containing accelerometer signals from ADLs and falls.
The remainder of this paper is organized as follows: Sect. 2 reviews related works. Section 3 describes the experimental framework, including the dataset and input features selection. Section 4 presents and discusses the results. Finally, Sect. 5 recapitulates the conclusions of our work.
2 Related Works
An FDS error causes either a false negative or a false positive. The first case implies not detecting a real fall while the second provokes an unnecessary alarm as an ADL is misinterpreted as a fall. An excessive number of false positives or false alarms can cause users to consider the system to be ineffective and useless [5].
SVM is one of the most employed techniques used to implement the fall detection algorithms in wearable systems (refer, for example, to [6] or [7] for two recent reviews on detection strategies for FDSs). Many works have shown that SVM can outperform other typical ML strategies [8, 9].
In 2006, Tong Zhang et al. [10] already proposed a method based on the One-class SVM algorithm. The algorithm was tested with the movement signals of the human body using a tri-axial accelerometer. The tests were carried out with 600 samples (from 6 categories) recorded from 12 volunteers. They obtained between 80 and 100% correct detection rate using the following six features: 1) the interval between the beginning of falling and the beginning of the reverse impact, 2) the average acceleration, 3) the variance of acceleration before the impact, 4) the interval of the reverse impact, 5) the average acceleration, and 6) the variance of acceleration after the impact.
Paulo Salgado et al. [11] tested the SVM algorithm with Gaussian Kernel function using accelerometers signals collected with a smartphone located on the volunteer’s torso using four features to determine the falls: 1) angular position, 2) angular rate, 3) angular acceleration and 4) radius curve. The tests showed a detection rate of 96%.
Medrano et al. [12] evaluated several supervised classifiers, including a SVM model with a Radial Basis Function kernel, using the accelerometer signals recorded with a smartphone transported by 10 volunteers, who generated 503 samples of simulated falls and 800 ADLs. Authors concluded that SVM clearly outperformed the other algorithms. Regarding to the information fed into the classifier, they have restricted this work to discriminate the acceleration shape during falls using the raw acceleration values.
Santoyo-Ramón et al. [13] used the UMAFall dataset containing data of accelerometers signals of 19 volunteers. These authors evaluated four algorithms: SVM, k-Nearest Neighbors (KNN), Naive Bayes and Decision Tree using six features: 1) Mean signal magnitude vector, 2) The maximum value of the maximum variation of the acceleration components in the three axes, 3) the standard deviation of the signal magnitude vector, 4) The mean rotation angle, 5) mean absolute difference, 6) the mean module acceleration. They concluded that the SVM algorithm achieved the performance in the detection of falls. In a subsequent work [14] they investigated the most significant features of the accelerometer signals, using the ANOVA tool for the statistical analysis of the performance. They evaluated the algorithms with three datasets, UMAFall [15], SisFall [16], and ‘Erciyes’ repository by Özdemir et al. [17].
In this work we focused on evaluating the importance of a set of candidates features for seven datasets commonly employed in the related literature. Random Forests (RFs) are a common tool for feature selection in machine-learning classifiers as their easy interpretability allows directly weighting the importance of each candidate feature to represent and characterize the data [18]. Thus, by using a RFs model [19] we determine which are the most relevant statistical features for each dataset. Then, we assess the performance of SVM depending on the dataset employed to select the feature set.
3 Process Description for Testbed
3.1 Data Bases Selection
The tests were carried out with publicly available datasets with accelerometer signals obtained on the volunteers’ waist. In the literature, eleven public datasets, presented in Table 1, were found with this criterion. The table indicates the complete number of samples and falls for each dataset.
To characterize each movement sample in the datasets, the features are calculated by focusing on a fixed time interval (an ‘observation window’) within every sample. As a fall is associated to a sudden peak in the acceleration magnitude caused by the impact against the floor, this window is selected around the instant (±0.5 s) where the maximum value of the acceleration module occurs. For our research we discarded FARSEEING, SMotion, UR Fall and DLR datasets, as no falls (or an insignificant number of falls) were found after applying this windowing techniques to the corresponding traces. In the rest of the datasets, we also ignored those samples in which the acceleration peak was found in the first or last period of 0.5 s of the whole time series (so that a complete observation window of 1 s cannot be properly defined). The datasets and the number of valid samples finally employed in our tests are shown in Table 2.
3.2 Feature Selection
In this work, we use the six ‘candidate’ features described in the work [14]. Additionally, we added seven extra features (see [27] for a more complete formal definition). For all the samples (ADLs or falls), the thirteen features were calculated taking into account only the triaxial signals captured by the accelerometer (located on the waist) that are provided by the seven datasets under study. The considered features are:
-
1.
Mean Signal Magnitude Vector of the acceleration vector (Mean SMV).
-
2.
The maximum value of the maximum variation of the acceleration components in the three axes (Max diff).
-
3.
The standard deviation of the Signal Magnitude Vector (Std SMV).
-
4.
The mean rotation angle (Mean rotation angle\()\).
-
5.
The mean absolute difference between consecutive samples of the acceleration magnitude (Mean absolute diff).
-
6.
The mean acceleration of the magnitude of the vector formed by the acceleration components that are parallel to the floor plane (Mean body inclination).
-
7.
Maximum value of the acceleration magnitude (Max SMV).
-
8.
Minimum value of the acceleration magnitude (Min SMV).
-
9.
Third central moment (skewness or bias) of the acceleration magnitude (Skewness SMV).
-
10.
Fourth central moment (kurtosis) of the acceleration magnitude (Kurtosis SMV).
-
11.
The mean of the autocorrelation of the acceleration magnitude within the observation window (Mean autocorrelation).
-
12.
The standard deviation of the autocorrelation module the acceleration magnitude within the observation window (Std autocorrelation).
-
13.
The frequency value at which the maximum of the Discrete Fourier Transform (DFT) of the acceleration magnitude is detected (Freq DFT max).
3.3 Classification of the Candidate Features
The capability of the different candidate features to characterize the signals was evaluated and classified through Random Forests classification [19], which fits a number of decision tree classifiers on various sub-samples of the dataset and uses averaging to improve the predictive accuracy while controlling over-fitting. For this study, one hundred trees were used. As a result, a matrix is obtained (see Table 3) with the percentage of importance of each feature for each database. As it can be observed, the relevance of each feature as a discrimination element strongly varies depending on the considered dataset.
From the previous data, aiming at defining a global classification of the features, we compute a global ranking by calculating the mean of the percentage importance value of each feature for each dataset. Figure 1 shows (in descending order) the error bar graphic with represents the mean and the standard deviation of the obtained values.

Mean importance of the features.
Table 4 shows the features ordered by the mean importance percentage. This ranking does not coincide with that provided in [14], which used the ANOVA analysis. In that work authors estimated that the best global variables were: 1) Std SMV, 2) body inclination, 3) max diff, 4) rotation angle, 5) absolute difference and 6) mean SMV.
4 Results and Discussion
In this section, we analyze the performance of the SVM algorithm when different criteria to select the input features are followed. The goal is to evaluate if the performance of the ML technique degrades when it is individually applied to a certain dataset, but the selection of the features is based on the analysis of a different repository. In this framework we also consider the case when the most relevant features are selected according to the mean case (following the global ranking presented in the previous tables).
Before training and testing, all the features values were scaled following a typical Z-score normalization [28].
4.1 Model Selection
For the study, we utilized Python and the implementation of the SVM algorithm provided by the scikit-learn package [29]. The SVM algorithm was evaluated with the following kernels: linear, polynomial, Radial Basis Function (RBF) and Sigmoid. The RBF kernel offered the best results, so the following tests were based on SVM configured with this kernel.
When training an SVM with the RBF kernel, two parameters must be considered: C and gamma. The parameter C, common to all SVM kernels, trades off misclassification of training examples against simplicity of the decision surface. The gamma parameter in turn defines the influence of a single training example [29]. The optimal values for the C and gamma parameters were set through a “fit” and a “score” method provided by scikit-learn package [30].
4.2 Model Training and Evaluation
We evaluated the performance of the SVM algorithm with a variable number of input features (from 1 to 13), taking into the rank obtained for both the global and particular analysis of the datasets. Model training is achieved with 70% of falls and 70% of the ADL while testing is carried out with the remaining 30% of samples. Whenever a new test is triggered, an extra feature is added according to 1) the rank established by the dataset under analysis (‘self-order’), 2) the global rank, 3 and 4) the rank defined by the analysis of two particular datasets (SisFall and UMAFall, as they have been frequently utilized by the related literature).
As a performance metric, we use Area Under the Curve (AUC) of Receiver Operating Characteristic (ROC) Curve. The AUC provides an aggregate measure of performance across all possible classification thresholds [31]. Figure 2 shows the ROC AUC values of the evaluations for each dataset for the four feature selection criteria and for the 13 possible combinations of features. Results show that, for almost all datasets and for a low number of features, basing the selection on the global analysis of all datasets leads to a certain increase of the performance of the detection algorithm, when it is compared with the case in which just a single dataset is considered as the unique reference (SisFall and UMAFall) to rank and select the features. This performance increase in the detection algorithm is more remarkable with the FallAllD dataset.
Another important aspect when dealing with ML strategies is the reduction of the number of features, as a lower dimension of the features may ease the implementation of the algorithm in low cost devices with limited computation resources. In this regard, from Fig. 2 we observe that an increase of the number of features beyond 4 or 5 does not imply a significant improvement of the performance metric if the selection of features is based on the global knowledge. The values of AUC are tabulated in Table 5 for the case in which the four most relevant features are selected to characterize the data. The table also shows the sensitivity (\(Se\)) and specificity (\(Sp\)) values (for the optimal configuration of the SVM), which are also basic metrics to evaluate binary classifiers.

AUC ROC for different feature selection criteria and number of features.
5 Conclusions
This paper has assessed the capacity of the detection algorithms intended for wearable FDSs to extrapolate conclusions obtained with a certain dataset when they are applied to data obtained with other users and movements. The study is based on the analysis of seven public datasets that contain recorded accelerometer signals captured on the volunteers' waist and the use of AUC ROC as a performance validation metric.
In particular, we analyzed the performance of the SVM algorithm when up to thirteen accelerometer-based features are considered to feed the classifier. Results reveal the difficulties of low dimensional algorithms to detect falls when the selection criteria are merely based on a previous study of a single dataset. This fact highlights the importance of considering a variety of datasets to configure, train and test any fall detection algorithm, as most current datasets have remarkable limitations in terms of the number of experimental subjects and the typology of movements with which they were generated.
On the other hand, the results also show with a small set of well selected features (in this work four features seem to be enough) an acceptable performance can be obtained for fall detection. The results suggest that using a greater number of features to determine if a fall occurs just slightly improves detection effective ratio at the cost of increasing the complexity of the algorithms, which may hamper its implementation on the low cost wearable devices that produce the fall detection decision in real-time.
References
Yoshida, S.: A global report on falls prevention epidemiology of falls. World Health Organization (2007)
Stevens, J.A., Corso, P.S., Finkelstein, E.A.: The costs of fatal and nonfatal falls among older adults. Inj. Prev. 12, 290–295 (2006)
Vallabh, P., Malekian, R.: Fall detection monitoring systems: a comprehensive review. J. Ambient. Intell. Humaniz. Comput. 9(6), 1809–1833 (2017). https://doi.org/10.1007/s12652-017-0592-3
Yacchirema, D., de Puga, J.S., Palau, C., Esteve, M.: Fall detection system for elderly people using IoT and ensemble machine learning algorithm. Pers. Ubiquitous Comput. 23(5), 801–817 (2019)
Igual, R., Medrano, C., Plaza, I.: Challenges, issues and trends in fall detection systems. Biomed. Eng. Online 12(1), 66 (2013)
Ramachandran, A., Karuppiah, A.: A survey on recent advances in wearable fall detection systems. BioMed Research International, vol. 2020. Hindawi Limited (2020)
Rastogi, S., Singh, J.: A systematic review on machine learning for fall detection system. Comput. Intell. 4, 1–24 (2021)
Hou, M., Wang, H., Xiao, Z., Zhang, G.: An SVM fall recognition algorithm based on a gravity acceleration sensor. Syst. Sci. Control Eng. 6(3), 208–214, September 2018
Aziz, O., Musngi, M., Park, E.J., Mori, G., Robinovitch, S.N.: A comparison of accuracy of fall detection algorithms (threshold-based vs. machine learning) using waist-mounted tri-axial accelerometer signals from a comprehensive set of falls and non-fall trials. Med. Biol. Eng. Comput. 55(1), 45–55 (2016). https://doi.org/10.1007/s11517-016-1504-y
Zhang, T., Wang, J., Xu, L., Liu, P.: Fall Detection by Wearable Sensor and One-Class SVM Algorithm, pp. 858–863. Springer, Berlin, Heidelberg (2006). https://doi.org/10.1007/978-3-540-37258-5_104
Salgado, P., Afonso, P.: Body Fall Detection with Kalman Filter and SVM, pp. 407–416. Springer, Cham (2015). https://doi.org/10.1007/978-3-319-10380-8_39
Medrano, C., Igual, R., Plaza, I., Castro, M.: Detecting falls as novelties in acceleration patterns acquired with smartphones. PLoS One 9(4), e94811 (2014)
Santoyo-Ramón, J., Casilari, E., Cano-García, J., Santoyo-Ramón, J.A., Casilari, E., Cano-García, J.M.: Analysis of a smartphone-based architecture with multiple mobility sensors for fall detection with supervised learning. Sensors 18(4), 1155, April 2018
Santoyo-Ramón, J.A., Casilari-Pérez, E., Cano-García, J.M.: Study of the detection of falls using the svm algorithm, different datasets of movements and ANOVA. In: Rojas, I., Valenzuela, O., Rojas, F., Ortuño, F. (eds.) IWBBIO 2019. LNCS, vol. 11465, pp. 415–428. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-17938-0_37
Casilari, E., Santoyo-Ramón, J.A., Cano-García, J.M.: Analysis of public datasets for wearable fall detection systems. Sensors (Switzerland), 17(7), 1513, July 2017
Sucerquia, A., López, J.D., Vargas-bonilla, J.F.: SisFall: a fall and movement dataset. Sensors 198(52), 1–14 (2017)
Özdemir, A.T.: An analysis on sensor locations of the human body for wearable fall detection devices: principles and practice. Sensors (Switzerland) 16(8), 1161 (2016)
Dewi, C., Chen, R-C:. Control, and undefined. Random forest and support vector machine on features selection for regression analysis. ijicic.org (2019)
sklearn.ensemble.RandomForestClassifier—scikit-learn 0.24.1 documentation. https://scikit-learn.org/stable/modules/generated/sklearn.ensemble.RandomForestClassifier.html. Accessed 16 Apr 2021
Gasparrini, S., Cippitelli, E., Spinsante, S., Gambi, E.: A depth-based fall detection system using a Kinect® sensor. Sensors 14(2), 2756–2775 (2014)
Martínez-Villaseñor, L., Ponce, H., Espinosa-Loera, R.A.: Multimodal database for human activity recognition and fall detection. In: Proceedings of the 12th International Conference on Ubiquitous Computing and Ambient Intelligence (UCAmI 2018), vol. 2, no. 19 (2018)
Saleh, M., Abbas, M., Le Jeannes, R.B.: FallAllD: an open dataset of human falls and activities of daily living for classical and deep learning applications. IEEE Sens. J. 21(2), 1849–1858 (2021)
Frank, K., Vera Nadales, M.J., Robertson, P., Pfeifer, T.: Bayesian recognition of motion related activities with inertial sensors. In: Proceedings of the 12th ACM International Conference on Ubiquitous Computing, pp. 445–446 (2010)
Kwolek, B., Kepski, M.: Human fall detection on embedded platform using depth maps and wireless accelerometer. Comput. Methods Programs Biomed. 117(3), 489–501 (2014)
Klenk, J., et al.: The FARSEEING real-world fall repository: a large-scale collaborative database to collect and share sensor signals from real-world falls. Eur. Rev. Aging Phys. Act. 13(1), 8, December 2016
Ahmed, M., Mehmood, N., Nadeem, A., Mehmood, A., Rizwan, K.: Fall detection system for the elderly based on the classification of shimmer sensor prototype data. Healthc. Inform. Res. 23(3), 147–158 (2017)
Casilari, E., Santoyo-Ramón, J.A., Cano-García, J.M.: On the heterogeneity of existing repositories of movements intended for the evaluation of fall detection systems. J. Healthc. Eng. 2020, 6622285 (2020)
sklearn.preprocessing.scale—scikit-learn 0.24.1 documentation. https://scikit-learn.org/stable/modules/generated/sklearn.preprocessing.scale.html. Accessed 19 Apr 2021
Version 0.23.2—scikit-learn 0.24.1 documentation. https://scikit-learn.org/stable/whats_new/v0.23.html#version-0-23-1. Accessed 16 Apr 2021
sklearn.model_selection.GridSearchCV—scikit-learn 0.24.1 documentation. https://scikit-learn.org/stable/modules/generated/sklearn.model_selection.GridSearchCV.html. Accessed 16 Apr 2021
Clasificación: ROC y AUC | Curso intensivo de aprendizaje automático. https://developers.google.com/machine-learning/crash-course/classification/roc-and-auc?hl=es-419. Accessed 19 Apr 2021
Funding
Research presented in this article has been partially funded by FEDER Funds (under grant UMA18-FEDERJA-022), Universidad de Málaga, Campus de Excelencia Internacional Andalucia Tech and Asociación Universitaria Iberoamericana de Postgrado (AUIP).
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Ethics declarations
The authors declare no conflicts of interest.
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
A. Silva, C., García−Bermúdez, R., Casilari, E. (2021). Features Selection for Fall Detection Systems Based on Machine Learning and Accelerometer Signals. In: Rojas, I., Joya, G., Català, A. (eds) Advances in Computational Intelligence. IWANN 2021. Lecture Notes in Computer Science(), vol 12862. Springer, Cham. https://doi.org/10.1007/978-3-030-85099-9_31
Download citation
DOI: https://doi.org/10.1007/978-3-030-85099-9_31
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-85098-2
Online ISBN: 978-3-030-85099-9
eBook Packages: Computer ScienceComputer Science (R0)