
Abstract
This paper considers a technology based on an autonomous unmanned underwater vehicle (AUV) MMT-3000, which was deployed in the integrated surveys of Antarctic ecosystems and deep-sea biological resources in the southern seas during the expedition onboard the R/V “Akademik Mstislav Keldysh” (cruise #79) in 2020. The proposed technology included also mission planning, software development, AUV operation, and organization of submersions and interactions with the mothership’s crew. The report addresses issues such as upgrading the AUV MMT-3000 to provide visual evaluation of zooplankton density in the water column and distribution of benthic animals, as well as equipping this AUV with a set of sensors to measure the hydrophysical and hydrochemical characteristics of the environment. The main results obtained in the course of the deep-sea missions are presented.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Autonomous unmanned underwater vehicle
- Deep-sea research
- Marine expedition
- Monitoring of marine benthic ecosystems
- Navigation system
- Software
1 Introduction
Investigations into the deep-sea environment of the ocean using unmanned underwater vehicles of various types have been increasingly developed in recent years. The particularly urgent issues that the Antarctic deep-sea research commonly addresses are the impact of the current climate trends on the natural ecosystems of the Southern Ocean, modern biological productivity, and the structure and spatial organization of pelagic and benthic ecosystems. This provides crucial data to estimate the potential allowable consumption of biological resources and assess other forms of human impacts (Morozov et al. 2020).
To date, contactless monitoring of marine benthic ecosystems using unmanned remotely operated underwater vehicles (ROVs) and autonomous underwater vehicles (AUVs) has become one of the most promising approaches to deep-sea research. In the conditions of seamounts and strong currents, various research operations are successfully performed using a Comanche 18, a work-class ROV towed via a depressor unit (Filaretov et al. 2017, 2019) that couples the rigid wire rope of the winch with the flexible communication cable of the vehicle. When surveying large areas or long routes, these ROVs need the mothership to be moved in the proper direction, which is not always possible in heavy ice conditions. The use of vehicles of this class in integrated polar expeditions is limited by the strict requirements to the mothership, as well as by the high cost of transportation and loading of the multiton winch and other equipment of the robotic system onboard.
Furthermore, the extreme conditions of the Antarctic seas, with their great depths, rapid currents, complex bottom topography, and drifting icebergs and sea ice, substantially restrict the use of ROVs connected to the mothership by a flexible communication cable. Being exposed to negative hydrodynamic effects in the surrounding aquatic environment, this cable not only hinders ROV’s movements (Filaretov et al. 2019), but can also be damaged around the propellers of the main propulsion and transverse thrusters of a support vessel.
Russian and foreign researchers have already accumulated substantial experience in deploying AUVs during Arctic and Antarctic expeditions (Morozov et al. 2020; Dowdeswell et al. 2003; McPhail 2007; Inzartsev et al. 2010). Even when operated under ice, AUVs can carry sets of sensors that provide a continuous representation of the physical and hydrochemical parameters of the environment. These vehicles can efficiently be used for both mapping bottom biocenoses and assessing abundance of aquatic organisms without taking them out of their habitat.
To conduct integrated biological studies (along with hydrophysical, hydrochemical, and other surveys) in the expedition aboard the R/V Akademik Mstislav Keldysh (cruise #79) in the Atlantic sector of the Antarctic, it was proposed to use an AUV MMT-3000 (Gornak et al. 2006; Borovick et al. 2018) designed by the Institute of Marine Technology Problems, Far Eastern Branch, Russian Academy of Sciences (IMTP FEB RAS).
To efficiently fulfill the research objectives of the expedition, the AUV MMT-3000 was upgraded, equipped with a set of sensors for measuring the environmental parameters, and set up with auxiliary equipment. A technology for performing research AUV operations, which includes deep-sea mission planning, software development, AUV operations, as well as organization of submersions and interactions with the motherships’ crew, was designed and tested.
1.1 Upgrading the AUV ММТ-3000
The AUV MMT-3000 was designed to conduct observation and search at depths of up to 3000 m (Gornak et al. 2006). The vehicle is normally equipped with an on-board integrated navigation system (Dubrovin et al. 2018), including a GPS unit, a depth sensor, a Doppler velocity log, a compass, an echo-sounding system, and a hydroacoustic navigation and communication system (HANCS), which makes possible not only real-time tracking of AUV motions, but also controlling the motion parameters (direction, speed, distance to the bottom, and depth) via telecommands sent by the operator from the above-water control post.
To carry out field studies, the AUV MMT-3000 was additionally equipped with FLCDRT-926 and FLNTU-665 fluorescence sensors, as well as with a CTD-NV-2406 profiler. To provide free water flow through these sensors during vehicle motion, they were fixed using a frame mounted on the upper part of the AUV hull parallel to its longitudinal axis (Fig. 28.1). A power battery and a single-board computer that logs data from the sensors were enclosed in a separate sealed container also fixed to the vehicle hull. When the AUV is above water, this control computer connects to the main AUV network via a USB-WiFi modem to synchronize time with the onboard computer of the vehicle and to upload the logged data to the operator’s computer.

The AUV ММТ-3000 with sensors mounted on its hull aboard the R/V Akademik Mstislav Keldysh
The mounted set of autonomous oceanographic sensors makes possible composing a table of measurements of the following marine environment parameters: concentration of dissolved organic matter (CDOM) and chlorophyll, conductivity, water temperature and turbidity, and sound speed. All measurements were matched to the AUV navigation data, including its current coordinates, heading, list angle, trim angle, depth, and speed.
During the preparatory works for operation in the Antarctic zone, a number of measures were taken to upgrade the navigation system of the AUV MMT-3000 to be deployed in a high-latitude region, including the one near the South Magnetic Pole, in the areas with low magnetic field strength, or in areas with a high degree of magnetic declination variability. In such areas, the error-of-heading measurements with the onboard MTI X-Sense magnetic compass increase and, thus, a decision was made to install a VG-035 fiber-optic gyroscope on the AUV to correct the magnetic heading. Off the Antarctic coast, the AUV was launched in the region with approximate coordinates 62° S, 54° W characterized by large magnetic declination (8.31° E), which was taken into account prior to launching the AUV.
The necessary accuracy of coordinate measurements aboard the AUV was provided by the use of the HANCS with an Evologics ultrashort base line (USBL). A S2C M 18/34 modem was installed on the AUV for data exchange via a hydroacoustic communication channel. The support vessel had an USBL S2C 18/34 modem with an integrated USBL HANCS antenna. When the AUV was traveling underwater, its coordinates were measured with the USBL HANCS on the mothership every 2–4 s in the real-time mode and transmitted to the vehicle via an acoustic channel for further correction of the vehicle’s dead-reckoning system. A special feature of the USBL HANCS installed on the AUV MMT-3000 is that it includes an Applanix POS/MV V5 satellite inertial measuring system for determining the spatial orientation of the support vessel. This solution, as compared to measuring vessel’s heading with magnetic compasses or inertial navigation systems, has certain advantages in Arctic or Antarctic conditions, because it provides a high accuracy of heading measurements (0.1°) irrespective of the geographical latitude of survey area.
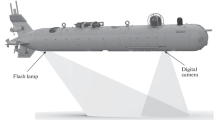
The AUV MMT-3000 was also equipped with a digital photo system based on a Prosilica GC1380 camera with a short-pulse illumination source. The system makes possible taking high-quality images with a resolution of 2 MP and a frequency of up to one frame per two seconds. The time of all images taken with the camera is synchronized with the general AUV onboard time by the software. This makes it possible to obtain data of any accompanying parameters of vehicle’s motion—coordinates, altitude above the bottom, depth, speed, etc. for each frame using the IMTPLooker data postprocessing program. During the expedition, the IMTPLooker was upgraded to display a ruler in the photo frame in order to estimate the geometric sizes of underwater objects. In addition, a streaming image-processing mode was set up to upload the selected images with a specified downsampling and to display the information selected by the user in each photograph.
To obtain data on the bottom topography and bottom sediment characteristics, the AUV MMT-3000 normally includes a side-scan sonar (SSS) and an acoustic profiler designed by IMTP FEB RAS. The SSS has an operating frequency of 470 kHz and a viewing band of 70 m onboard, which provides a resolution with a 5 cm distance and 0.5° bearing. The acoustic profiler makes possible scanning the bottom to a depth of 40 m.
To increase the maneuverability of the AUV and provide its motion in the photography mode at a low speed (from 0.1 m/s) near the bottom (up to 0.5 m), a unit with a vertical transverse thruster having a thrust force of at least 7 kgf was designed. This unit was installed in the central part of the vehicle (Fig. 28.1), with the longitudinal axis of the thruster oriented perpendicular to the AUV longitudinal axis. The thruster makes possible taking high-quality photos without blurring, thanks to a more accurate stabilization of the altitude above the bottom, which makes it possible to identify and measure the size of benthic animals in the images taken.
A comprehensive upgrade of the AUV software with a few additional modules, developed on the platform of the RCE software, was performed prior to the expedition. Drivers for the photosystem and the set of autonomous oceanographic sensors were written; the dynamic model of the AUV was improved taking into account the new transverse thruster unit, and the high-level mission-planning system (Bagnitckii et al. 2011) was adjusted to the hardware and software of the AUV MMT-3000.
To provide efficient interaction with the mothership’s crew, a navigation software interface for the ship’s bridge was developed. This simple and intuitive web interface clearly displays the relative positions and the tracks of the AUV and the vessel, as well as all the parameters of vehicle motions.
Moreover, a number of other operations to install auxiliary equipment for the robotic system were performed as follows:
-
Installing a container to store the laboratory equipment
-
Preparing the hull structure, mechanical elements, and outboard AUV cables
-
Making a pole for mounting a USBL HANCS antenna
-
Setting up the control and communication post
-
Making a beacon for the calibration of USBL HANCS
-
Preparing a kit of spare parts, tools, and accessories of the AUV system
The sea-based tests of the AUV MMT-3000 in Patrokl Bay, Primorsky Krai, Russia, confirmed the operability of all the systems of the vehicle and its readiness for the research fieldwork.
1.2 Specifics of Undersea Operations
To fulfill the goals of the scientific research using the AUV, it is necessary to address a number of important issues such as surveying large deep-sea areas. Furthermore, this requires high-quality photography, SSS scanning, profiling, and measuring the parameters of the surrounding aquatic environment along vehicle’s routes that will be conducted in the conditions of rough terrain and strong near-bottom currents.
Since 2007, the AUV MMT-3000 has been used in various deep-sea operations such as, in particular, hydrographic surveys for the project to lay undersea communication cables in the Sea of Okhotsk (Boreiko et al. 2019). Based on the accumulated experience, we propose an AUV-based technology for solving research problems that includes undersea operation planning, AUV operation, organization of submersions, and interactions with the mothership’s crew.
Before launching the AUV, the study area is surveyed with the vessel’s echo sounder; based on its measurements, a refined depth map for the selected polygons is composed, and the AUV mission (route and motion modes) is designed taking into account the objectives set forth. The route of the support vessel is planned in a way to keep the AUV always within the range of the USBL HANCS during the mission. The operability of all the AUV subsystems and the above-water control system is tested. The test consists of a simulation of the vehicle’s mission that the operator runs to check whether all the AUV mechanisms and equipment respond properly to the mission commands and whether any failures of software and hardware might occur.
After the vessel arrives at the specified point of the study site, if weather conditions permit, the AUV is safely lowered, while the vessel is dynamically positioned at this point in a mode that can compensate for the wind- and current-induced drift (Fig. 28.2). Assistants on a motor boat manually pull the vehicle to a safe distance away in order to avoid its being driven to the blades of the main and transverse thrusters of the vessel. After that, the operator sends the command to launch the mission via a radio channel, and the AUV starts submersion.

Launching the AUV in the Bransfield Strait
Based on the navigation data, the graphical interface displays the tracks of motions of the support vessel and the AUV, as well as the telemetry data transmitted via the hydroacoustic communication system. This gives us the opportunity to set target points and indicate the location of underwater objects by inputting geographical coordinates or using the marks previously made in the loaded map of the survey area. This graphical interface is displayed not only on the screen of the AUV operator, but also on the onboard computer of the vessel’s watch officer, which provides timely adjustments of the vessel’s course in the real-time mode. Prior to sending the AUV along the planned route, the operator provides the mothership’s crew with all necessary commands to move the vessel in a specified direction for a specified distance so that the AUV does not go beyond the range of USBL HANCS.
For mapping the benthic biocenoses and assessing the abundance of aquatic organisms without taking them out from their habitat, it was proposed to design the AUV missions using the method of similar ROV-based operations conducted in the Sea of Japan, Sea of Okhotsk, Bering Sea, and in the Pacific Ocean (Filaretov et al. 2017, 2019; Galkin et al. 2017a, b). Quantification of objects during submersions requires performing photographic transects with a straight-lined motion of the AUV at a distance of about 1 m from the bottom and at a constant speed of approximately 0.5 m/s. The preliminary experimental surveys in Patrokl Bay showed that this method provides adequate information about the composition and distribution of animals larger than 1 cm.
For SSS scanning and obtaining data from the acoustic profiler and the echo-sounding system, the AUV should move at a speed of approximately 1.5 m/s and a distance of 7 m from the bottom. The obtained data can be used for mapping the survey area and determining the sediment composition and roughness of bottom topography. For the research studies of the integrated expedition, decisions about feasibility of deploying a Sigsbee trawl within the study site, as well as about dredging and use of grab samplers, should be made on the basis of this data.
Furthermore, the AUV equipment with a set of sensors for measuring the parameters of the surrounding aquatic environment makes it possible to record the hydrophysical and hydrochemical characteristics of the water along the AUV route and also during the submersion and ascent of the vehicle.
It should be noted that, simultaneously with an AUV mission, other outboard research operations, such as bottom grab sampling or dipping an oceanographic rosette sampler, may also be performed on the support vessel kept at a specified position.
After completing the mission, the AUV surfaces and transmits the coordinates of its location to the operator’s post via a radio channel. After being found, the vehicle is towed by a motor boat to the vessel and lifted aboard.
1.3 Results of Surveys Conducted during the Expedition
The technological solutions presented here were applied in the study of the biodiversity of benthic communities in extreme conditions of the southern seas during the expedition aboard the R/V Akademik Mstislav Keldysh (cruise #79). Prior to the beginning of works, the AUV oceanographic sensors and USBL HANCS were calibrated. A test mission was also run to ballast the AUV in the mode of hovering at depths of 0.5 and 5 m. During this mission, the stability of the vehicle and the operability of the main and transverse thrusters were evaluated. Based on the results of the evaluation, the AUV was ballasted for operation in the Antarctic conditions.
Below, we consider the results of a submersion of the AUV MMT-3000 at a station with coordinates 61.43° S, 52.22° W and a depth of 570 m as an example of the work mission. During this mission, the AUV made two straight-lined parallel 1-km runs (transects) spaced 100 m apart. Figure 28.3 shows the tracks of the vehicle on a 3D model of bottom topography built using the data from the onboard echo sounder. While moving down these transects, the vehicle performed profiling and SSS scanning of the bottom topography. Then, moving along a different specified course at a height of 1 m above the bottom, it also took a series of photographs of the sea bottom. The images of aquatic organisms taken along the photographic transect made it possible to assess the pattern of their distribution. The software provides cross-linking the photographic images taken and estimating the area of the bottom surface in each image. Based on the data collected (Fig. 28.4), the benthic team of the expedition made a decision to carry out a trawl haul (with a Sigsbee trawl) along the AUV track. The image received from the SSS shows a strange object (similar to a rod) with a height of 3.16 m. According to the profilogram, the sediments to a depth of 10–15 m consist mainly of dense sandstone with a small amount of pebble that has a small admixture of silt on the surface.

A 3D model of bottom topography inferred from the AUV echo sounder data

Photos of benthic organisms at a depth of ~570 m at 61.4325° S, 52.2258° W (top panel); image of a vertical object like a rod in the bottom (middle panel); profile of sediments below the AUV to a depth of ~20 m below the bottom (bottom panel)
The parameters of the aquatic environment were also measured with a set of oceanographic sensors (CTD, CDOM, Chlorophyll-a, and turbidity sensor) during the AUV missions.
As an example, describing the evaluation of the bottom topography roughness, Fig. 28.5 shows a segment of the AUV motion in the mode of hovering at a specified altitude above the bottom using the transverse thrusters. Within this 187-m segment, elevation variations did not exceed 3 m.

A segment of AUV movement in the mode of hovering at a specified altitude above bottom. The figure shows a graph ~187 m long
Figure 28.6 shows the results of an autonomous operation of the AUV onboard integrated navigation system. In the first half of the mission, there was a period of temporary loss of communication with the support vessel, during which the coordinates of the vehicle were not corrected by USBL HANCS data. Within this segment, the error of dead reckoning by the AUV onboard navigation system can be estimated. The duration of the autonomous operation of this system without corrections from USBL HANCS lasted for 17.5 min. During this time, the accumulated error of coordinate determination was equal to 25 m, which constitutes 3% of the distance travelled. These values demonstrate the satisfactory operation of the AUV onboard navigation system in the fully autonomous mode under the current conditions. The loss of communication between the vessel and the AUV probably occurred due to some of the vessel’s maneuvers and the insufficient depth of the USBL HANCS antenna installed on the external submersible pole and vertically fixed to the vessel’s hull side.

Coordinates of the AUV based on the data of USBL HANCS and the onboard integrated navigation system (INS)
2 Conclusions
Following are the main results of the deployment of the AUV MMT-3000 during the expedition aboard the R/V Akademik Mstislav Keldysh (cruise #79) in the Atlantic sector of the Antarctic.
The technological solutions implemented for upgrading the vehicle and in its preliminary tests were used and improved in the expedition to carry out a wide range of research works in harsh Antarctic conditions. The marine biology, hydrophysics, and hydrochemistry studies, as well as the survey of the topography and structure of the sea floor, were of primary importance.
The technological results achieved are as follows:
-
The AUV research equipment provides visual evaluation of the distribution of benthic animals in coastal ecosystems of the Antarctic and deep-sea biological resources in the southern seas.
-
The efficiency of the software and special algorithms for assessing the distribution and surveying benthic bioresources over a large area, as well as for estimating the zooplankton density in the water column, has been confirmed.
-
The set of hydrophysical and hydrochemical sensors provides assessment of the state of the environment.
-
For a general environmental assessment, there is an opportunity to measure the chlorophyll-a concentration in the upper water layers, which determines the conditions for primary production in the Antarctic ecosystems.
References
Bagnitckii A, Inzartsev A, Senin R. (2011) Facilities of AUV search missions planning. OCEANS’11 – MTS/IEEE Kona, Program Book
Boreiko AA, Kushnerik AA, Mikhailov DN, Scherbatyuk AF (2019) Current experience for usage of some AUV developed in IMTP FEB RAS. Extreme Robotics 1(1):226–232
Borovick A, Inzartsev A, Kamomiy A, Scherbatyuk A, Sporyshev M (2018) Some results of the ecological investigation in Zolotoy Rog Bay using AUV MMT 3000. 2018 OCEANS MTS/IEEE Kobe Techno-Oceans, OCEANS
Dowdeswell JA, Evans J, Mugford R et al (2003) Autonomous underwater vehicles and investigations of the ice-ocean interface in Antarctic and Arctic waters. J Glaciol 54(187):661–672
Dubrovin F, Scherbatyuk A, Vaulin Y (2018) Some results of operation for the AUV MMT 3000 mobile navigation system on long and deep-water trajectories. 2018 OCEANS – MTS/IEEE Kobe Techno-Oceans, OCEANS
Filaretov VF, Konoplin NYu, Konoplin AYu (2017) Approach to creation of information control system of underwater vehicles. In: Proceedings of 2017 international conference on industrial engineering, applications and manufacturing (ICIEAM), S.-Petersburg, Russia, May 16–19
Filaretov VF, Konoplin AYu, Konoplin NYu (2019) Development of intellectual support system for ROV Operators. IOP Conf Ser Earth Environ Sci 272:032101. https://doi.org/10.1088/1755-1315/272/3/032101
Galkin SV, Vinogradov GM, Tabachnik KR, Konoplin AY, Ivin VV (2017a) Biological investigations of the Piip Volcano with ROV “Comanche 18”. In: Abstracts of the international conference on scientific technological developments of research and monitoring of marine biological resources. Vladivostok, Russia, May 22–24, p 41
Galkin SV, Vinogradov GM, Tabachnik KR, Rybakova EI, Konoplin AY, Ivin VV (2017b) Megafauna of the Bering Sea slope based on observations and imaging from ROV “Comanche”. Marine Imaging Workshop, Kiel, Germany, 2017
Gornak VE, Inzartsev AV, Lvov OY, Matvienko YV, Scherbatyuk AF (2006) MMT 3000 – Small AUV of New Series of IMTP FEB RAS. OCEANS 2006, Boston
Inzartsev AV, Kamornyi AV, Kiselev LV, Matvienko YuV, Pavin AM, Rylov NI, Rylov RN, Vaulin YuV (2010) The integrated navigation system of an autonomous underwater vehicle and the experience from its application in high Arctic latitudes. Gyroscopy and Navigation 1:107–112
McPhail S (2007) Autosub operations in the Arctic and the Antarctic. In: Proceedings of the international masterclass, 28–30 March 2006, pp 27–38
Morozov EG, Spiridonov VA, Molodtsova TN, Frey DI, Demidova TA, Flint MV (2020) Investigations of the ecosystem in the Atlantic sector of Antarctica (Cruise 79 of the R/V Akademik Mstislav Keldysh). Oceanology 60(5):721–723
Acknowledgments
The authors express their sincere gratitude to the crew of the R/V Akademik Mstislav Keldysh for the highly professional support of the AUV launches. The authors also thank all members of the Institute of Marine Technology Problems, Far Eastern Branch, Russian Academy of Sciences, who participated in the preparatory works, upgrading, and preliminary tests of the AUV MMT-3000.
Funding
The improvement of the operator’s post software and the algorithms for processing data from the onboard sensors were implemented with the financial support of the Grant of the Ministry of Science and Education, Russian Federation 13.1902.21.0012 «Fundamental Problems of Study and Conservation of Deep-Sea Ecosystems in Potentially Ore-Bearing Areas of the Northwestern Pacific» (agreement №075-15-2020-796).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Konoplin, A.Y. et al. (2021). Application of Autonomous Underwater Vehicles for Research of Ecosystems in the Southern Ocean. In: Morozov, E.G., Flint, M.V., Spiridonov, V.A. (eds) Antarctic Peninsula Region of the Southern Ocean. Advances in Polar Ecology, vol 6. Springer, Cham. https://doi.org/10.1007/978-3-030-78927-5_28
Download citation
DOI: https://doi.org/10.1007/978-3-030-78927-5_28
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-78926-8
Online ISBN: 978-3-030-78927-5
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)