
Abstract
In this study, several peak and energy vector-valued ground motion intensity measures (IMs) are proposed to predict maximum inter-story drift and hysteretic energy demands of 3D reinforced concrete (R/C) buildings subjected to narrow-band motions. The selected vector-valued IMs are based on the spectral acceleration, pseudo-velocity, velocity and input energy at first mode of the structure as first component. As the second component, ground motion parameters based on peak, integral and spectral shape proxies such as the well-known Np are used. The objective of the present study is to provide vector-valued IMs whit the ability to predict the maximum inter-story drift and hysteretic energy demands on 3D framed structures. It is observed that vector-valued IMs based on Np provide a high relation whit maximum inter-story drift and hysteretic energy demands of reinforced concrete framed buildings.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Since the beginning of earthquake engineering and seismology, several studies have been developed to provide a parameter with the ability to characterize the ground motion potential of an earthquake which is known as ground motion intensity measure. The most important characteristic of an IM is the reduction of the uncertainty in the estimation of the seismic response of structures under earthquakes (efficiency). In others words, the efficiency is defined as the ability to predict the response of structures subjected to earthquakes with low uncertainty. Although, several studies have been developed to propose or to analyze ground motion intensity measures [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18]. In most of the cases, the proposed IMs are based in the prediction of maximum demands such as maximum ductility and inter-story drift. By other hand, nowadays, several studies promote the use of vector-valued or scalar ground motion IMs based on spectral shape, because they predict with good accuracy the maximum inter-story drift and maximum ductility of structures subjected to earthquakes [12,13,14,15, 17,18,19,20]. In particular, vector and scalar ground motion intensity measures based on Np which are representative of the spectral shape have resulted very well correlated with the nonlinear structural response [18, 20, 21]. However, as it was mentioned before, an appropriated IMs should be capable of predicting all types of engineering demand parameters, as example, hysteretic energy demands. Hysteretic energy demands are very important in structures when subjected to long duration narrow-band ground motions [22,23,24,25,26,27,28]. In this study, vector-valued ground motion intensity measures have been proposed in order to predict the seismic response of 3D reinforced concrete buildings under narrow-band motions recorded at the soft soil site of Mexico City. The proposed IMs are separated in 2 sets, the first one is composed by vector-valued IMs with maximum peak ground and integral response, and the second set by vector-valued IMs with spectral shape parameters as is the case of the Np parameter. For the evaluation of the vector-valued IMs, the maximum inter-story drift and the hysteretic energy demand are used as engineering demand parameters. It is important to say that hysteretic energy demand is not commonly used in efficiency studies of IMs in comparison with the maximum inter-story drift or peak demands. So far, this study differs from others by the use of 3D structures, as well as the use of both performance parameters (maximum inter-story drift and the hysteretic energy demand). Finally, an optimization of the Np parameter for the selected spectral shape vector-valued IMs developed through the values of Sa(T1), Sv(T1), V(T1) and EI(T1) is computing in the present study.
2 Methodology
2.1 Vector-Valued Ground Motion Intensity Measures
The prediction of the seismic response is estimated considering 32 different vector-valued ground motion IMs, which are divided in 2 sets of 16 IMs. The first set is based on traditional peak and integral IMs, while the second is based on the proxy of the spectral shape named Np. For both sets the parameters Sa(T1), Sv(T1), V(T1) and EI(T1) are considered: where, Sa is the spectral acceleration, Sv is the pseudo-velocity, V is the velocity, EI is the input energy and T1 is the first mode of vibration. Note that EI can be defined from the equation of motion of a single degree of freedom system as follows:
In Eq. (1), m is the mass of the system; c, the viscous damping coefficient; \({\text{f}}_{{\text{s}}} \left( {{\text{x}},{\dot{\text{x}}}} \right)\), the non-linear force; \(\ddot{x}\), the ground acceleration; and x, the displacement with respect to the base of the system. A dot above x indicates a derivative with respect to time. In case of an elastic linear systems, \({\text{f}}_{{\text{s}}} \left( {{\text{x}},{\dot{\text{x}}}} \right) = {\text{kx}}\), where k is the stiffness of the system.
Integrating each member of Eq. (1) with respects to x, yields:
Equation (2) can be written as energy balanced equation as follows [29]:
where EK, ED, ES and EH represent the kinetic (K), viscous damping (D), deformation (S) and dissipated hysteretic (H) energies, respectively; and EI is the relative input energy.
For the set number 1, the parameters PGA, PGV, tD and ID are used as second component of the vector-valued IMs; where PGA represents peak ground acceleration, PGV peak ground velocity, and finally, tD and ID, represents the effective duration of the earthquake [30] and the accumulated potential [4], respectively. The effective duration (tD) is defined as the time interval between 5% and 95% of the Arias Intensity [2], which is obtained from the following equation:
where T is the total duration of the earthquake. In addition, the ID factor is defined as:
Table 1 shows a summary of the selected vector-valued IMs of the first set. The first column indicates the ground motion IMs; the second, third and fourth columns, indicate if the IMs are based on peak ground response, duration and/or spectral shape response, respectively.
In the second set of vector-valued IMs, the parameter Np is used as the second component of the vector-valued IMs to determine the spectral shape [18]. The general form of the Np generalized parameter is defined in the following equation:
From the Eq. (6), S(Tj) represents a spectral parameter taken from any type of spectrum as in the case of acceleration, velocity, displacement, input energy, inelastic parameters and so on, at period Tj. Savg(Ti, …, Tf) is the geometrical mean of a specific spectral parameter between the range of periods Ti and Tf. Note that the periods Ti and Tj could be different. Npg is similar to the traditional definition of Np [10] but for different types of spectra and a wider range of periods. In such a way that parameters as the traditional Np or the recently proposed SaRatio [31] are particular cases of the generalized spectral shape parameter Npg. If the pseudo-acceleration spectrum is used, and Ti = Tj = T1 (first mode structural vibration period) Npg is equal to the traditional Np. If the value of Np is lower than one, we can expect that the average spectrum with negative slope in the range of periods between Ti and Tf, if Np is equal to one, the average spectrum is to about flat in the same range of periods, and in the case of Np is larger than one, we can expect an increasing trend of the spectra beyond Ti. In this work, 10 points are used to calculate the average spectrum, a value of S(Tj) equal to T1, and the values of Ti and Tf, were obtained through an optimization study as will be observed below. In Table 2 a summary of the selected vector-valued IMs for the second set is illustrated.
2.2 Structural 3D Reinforced Concrete Frames Models
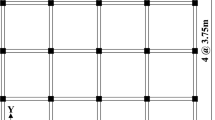
Two 3D R/C frames having 7 and 10 stories were considered for the studies reported herein. The 3D frames are denoted as F7 and F10 respectively (see Fig. 1). The frames, designed according to the Mexico City Seismic Design Provisions (MCSDP). It was considered that the elements (beams and columns) of the structures have a hysteretic behavior similar to the modified Takeda model to represent the non-linearity of the material. The main characteristics of the 3D R/C models are shown in Table 3. Note that column eight in Table 3 represents the fundamental period of vibration of the structure.

F4 (a) and F10 (b) frame models
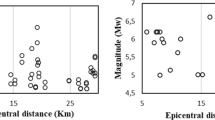
2.3 Earthquake Ground Motion Records
To determine the seismic performance of the two 3D R/C frames, a dynamic analysis is carried out. For this aim, the structures are subjected under the action of seismic records representative of the site in which they are assumed to be displaced. In this work it is assumed that the buildings are located at soft soil of Mexico City and are subject to narrow band seismic ground motions. The following table indicates the narrow band accelerograms obtained from the soft soil of Mexico City used in the present study (Table 4).
2.4 Scaling of Seismic Records
The seismic records or accelerograms were scaled to represent seismic events of different intensities, and thus to determine the responses of the modeled structures in terms of the maximum inter-story drifts and the hysteretic energy demands, which allows to compare the efficiency of the different IMs used in this work. For the scaling of the seismic records the combination of the horizontal components of the earthquake was used [see Eq. (7)]. The scaling was done to have specific values in the response spectra in a given period (the period of interest, which is the fundamental period of the structures was used). The parameters to scale the records are Sa(T1), Sv(T1), V(T1) and EI(T1).
In Eq. (7), while IMs is the selected intensity measure that represent the combination of both directions of the ground motion (i.e. Sa, Sv, V and EI), IMsComp1 and IMsComp2 are the intensity measure in each horizontal component orthogonal.
2.5 Performance Parameters
The engineering demand parameters selected were the maximum inter-story drift and the normalized hysteretic energy by the mass (EN), Eq. (8). These parameters are selected due to their importance for seismic design purposes, since they capture both information about maximum demands and the effect on the duration of the earthquake and with the cumulative demands [32]. In fact, currently various damage indexes have been proposed based on hysteretic energy [33,34,35].
3 Numerical Results
3.1 Relation Between Vector-Valued IMs and the Structural Demand of 3D R/C Fames
Baker and Cornell [14] and Bojórquez and Iervolino [18] showed the advantages of using vector-valued ground motion intensity measures instead of scalars. The main advantage is the increasing in the efficiency to predict the structural response. Herein with the aim to obtain the relation between the structural response of R/C frames and the vectors selected; nonlinear incremental dynamic analysis was used to obtain the seismic response of the R/C frames subjected to the 31 ground motion records by using the first parameter of the vector and then the relation between the structural response of the R/C frames and the second parameter of the vector is obtained. Figure 2a shows a general illustrative example of the incremental dynamic analysis for Sa(T1) in terms of the maximum inter-story drift. It is observed a poor relation among Sa(T1) and maximum inter-story drift, in fact the uncertainty to predict maximum inter-story drift using the spectral acceleration tend to increase with the intensity of the earthquake ground motion. Figure 2b illustrates the relation obtained for <Sa(T1), NpSa> and the maximum inter-story drift when Sa(T1) = 1 g (see the values in the circle of Fig. 2b). Note the good relation between NpSa and the maximum inter-story drift reflecting the advantage of using the vector-valued ground motion intensity measure. It explains the reduction in the uncertainty associated with the structural response when vector-valued parameters are selected as intensity measures, and this type of intensity measures could be more efficient for nonlinear structural response prediction.

a Illustrative example of incremental dynamic analysis scaling for Sa(T1); b relation between NpSa and Maximum inter-story drift at Sa(T1) = 1g
3.2 Optimization of the Np Parameter
As it was mentioned above, a study was carried out to determine the value of Ti and Tf to be used for the Np spectral shape parameter of the second set of intensity measures. For this reason, pairs of Ti values were created ranging from 0.1 * T1 to 1.0 * T1, and Tf from 1.1 * T1 to 3.0 * T1. The value of Np of all the pairs was calculated, applied to the 16 vector-valued spectral shape IMs and were selected the values for which Ti and Tf minimize the standard deviation of the natural logarithm of the seismic response (maximum inter-story drift or hysteretic energy) of the R/C buildings.
A summary of the optimal Ti and Tf values computed for the F7 R/C frame is presented in Table 5 and for the F10 R/C frame in Table 6. It is observed in general, that the value of the initial period Ti is equal to T1, while for Tf, a value between 2.0 and 3.0 times T1 is suggested, which is valid for the two selected performance parameters (maximum inter-story drift and normalized hysteretic energy).
3.3 Efficiency of Selected Vector-Valued Ground Motion IMs
The numerical results of this work are described here. To show the effectiveness of the selected vector-valued IMs, the standard deviation values of the natural logarithm of the maximum inter-story drift and the hysteretic energy demands, obtained from the incremental dynamic analysis at different levels of intensities are presented. Standard deviations were estimated using a linear regression for all cases and scaling levels of IMs used, and of the R/C framed building considered. Figure 3 shows the results obtained for the vector-valued IMs that use as first component Sa(T1), in terms of the maximum inter-story drift for both frames; and, Fig. 4 shows the same results, but now, in terms of the hysteretic energy demands. By other hand, Fig. 5 shows the results obtained for vector-valued IMs that use EI as first component, in terms of the maximum inter-story drift, for the two 3D R/C frames; and, Fig. 6, shows the same results, but, in terms of the hysteretic energy demands. Note that since the results generated by vector-valued IMs that use Sv(T1) and V(T1) as first component have low efficiency than Sa(T1), only the results of the IMs that use Sa(T1) as the first component have been included for the sake of brevity. In addition, with the aim to have a comparison in terms of input energy, also this parameter was plotted when represent the first component of the vector. It can be seen that the vector-valued IMs that use spectral shape parameters Np are more efficient to predict the seismic demands (peak and cumulative) for every frame, especially those based on spectral acceleration or velocity (NpSa, NpSv, NpV). By the other hand, the peak ground response and duration parameters of the first set of IMs are not good estimators of the maximum inter-story drift and the normalized hysteretic energy demands, because they produce large uncertainties. Finally, it is observable that the selected vector-valued IMs are more efficient in predicting the maximum inter-story drift than the hysteretic energy demands.

Efficiency comparison of the standard deviation of the natural logarithm for the maximum inter-story drift of vector-valued IMs that use Sa(T1) as first component for: a F7 frame, and b F10 frame

Efficiency comparison of the standard deviation of the hysteretic energy demands of vector-valued IMs that use Sa(T1) as first component for: a F7 frame, and b F10 frame

Efficiency comparison of the standard deviation of the natural logarithm for the maximum inter-story drift of vector-valued IMs that use EI(T1) as first component for: a F7 frame, and b F10 frame

Efficiency comparison of the standard deviation of the hysteretic energy demands of vector-valued IMs that use EI(T1) as first component for: a F7 frame, and b F10 frame
Figure 7 shows the comparison between the 16 vector-valued IMs of the second set of IMs, those that use in their second component an IMs based on the spectral shape, for both models F7 and F10 respectively, the results shown in terms of the standard deviation of the natural logarithm of the maximum inter-story drifts and for a median value of 0.03. As seen in Fig. 7, vector-valued IMs that use Sa(T1), or Sv(T1), have the best efficiency to predict the seismic response, using NpSa, NpSv or NpV as second component.

Efficiency comparison of the standard deviation of the maximum inter-story drifts of vector-valued IMs that use IMs based on spectral shape as second component for: a F7 frame, and b F10 frame
4 Conclusions
Several vector-valued ground motion intensity measures have been analyzed with the aim to obtain the best predictor of the structural response in terms of the maximum inter-story drift and the hysteretic energy demands of 3D R/C frames under narrow-band ground motions. The study considered IMs based on peak, cumulative and spectral shape proxies. The numerical study concludes that there is no evidence to support the use of vector-valued IMs based exclusively in peak ground motion characteristics for predicting seismic demands of 3D R/C buildings. The results obtained by the vector-valued IMs that use Sa(T1) and Sv(T1) as the first component of the vector are similar since, they are related, and their efficiency is superior than those obtained using V(T1) and EI(T1) as the first component. The optimization study shows that Ti values equal to T1, and Tf ranging from 2.0 to 3.0 times T1, produce an improvement in the prediction of the seismic response. The vectors <Sa(T1), Npsa>, <Sa(T1), NpSv> and <Sa(T1), NpV> are those that produce the least uncertainty when predicting seismic demands, in such a way that they are very promising to the next generation of advanced vector-valued ground motion intensity measures.
References
Housner, G.W.: Limit design of structures to resist earthquakes. In: First World Conference on Earthquake Engineering, Berkeley, California (1956)
Arias, A.: A measure of earthquake intensity. In: Seismic Design for Nuclear Power Plants, pp. 438–483. MIT Press, Cambridge, MA (1970)
Von-Thun, J.L., Rochin, L.H., Scott, G.A., Wilson, J.A.: Earthquake ground motions for design and analysis of dams. In: Earthquake Engineering and Soil Dynamics II—Recent Advance in Ground-Motion Evaluation, Geotechnical Special Publication 20 ASCE, pp. 463–481 New York (1998)
Cosenza, E., Manfredi, G.: A seismic design method including damage effect. In: 11th European Conference on Earthquake Engineering, Paris, France (1998)
Mehanny, S.S.: A broad-range power-law form scalar-based seismic intensity measure. Eng. Struct. 31(7), 1354–1368 (2009)
Jamshidiha, H.R., Yakhchalian, M., Mohebi, B.: Advanced scalar intensity measures for collapse capacity prediction of steel moment resisting frames with fluid viscous dampers. Soil Dyn. Earthq. Eng. 109, 102–118 (2018)
Javadi, E., Yakhchalian, M.: Selection of optimal intensity measure for seismic assessment of steel buckling restrained braced frames under near-fault ground motions. J. Rehab. Civ. Eng. 7(3), 162–181 (2019)
Luco, N., Cornell, C.A.: Structure-specific scalar intensity measures for near-source and ordinary earthquake ground motions. Earthq. Spectra 23(2), 357–392 (2007)
Tothong, P., Cornell, C.A.: Structural performance assessment under near-source pulselike ground motions using advanced ground motion intensity measures. Earthq. Eng. Struct. Dyn. 37(7), 1013–1037 (2008)
Baker, J.W., Cornell, C.A.: Vector-valued intensity measures for pulse-like near-fault ground motions. Eng. Struct. 30(4), 1048–1057 (2008)
Yakhchalian, M., Nicknam, A., Amiri, G.G.: Optimal vector-valued intensity measure for seismic collapse assessment of structures. Earthq. Eng. Eng. Vib. 14(1), 37–54 (2015)
Eads, L., Miranda, E., Lignos, D.G.: Average spectral acceleration as an intensity measure for collapse risk assessment. Earthq. Eng. Struct. Dyn. 44(12), 2057–2073 (2015)
Cordova, P.P., Dierlein, G.G., Mehanny, S.S.F., Cornell, C.A.: Development of a two parameter seismic intensity measure and probabilistic assessment procedure. In: The Second U.S.-Japan Workshop on Performance-Based Earthquake Engineering Methodology for Reinforce Concrete Building Structures, Sapporo, Hokkaido, pp. 187–206 (2001)
Baker, J.W., Cornell, C.A.: A vector-valued ground motion intensity measure consisting of spectral acceleration and epsilon. Earthq. Eng. Struct. Dyn. 34, 1193–1217 (2005)
Tothong, P., Luco, N.: Probabilistic seismic demand analysis using advanced ground motion intensity measures. Earthq. Eng. Struct. Dyn. 36, 1837–1860 (2007)
Yakut, A., Yilmaz, H.: Correlation of deformation demands with ground motion intensity. J. Struct. Eng. ASCE 134(12), 1818–1828 (2008)
Mehanny, S.S.F.: A broad-range power-law form scalar-based seismic intensity measure. Eng. Struct. 31, 1354–1368 (2009)
Bojórquez, E., Iervolino, I.: Spectral shape proxies and nonlinear structural response. Soil Dyn. Earthq. Eng. 31(7), 996–1008 (2011)
Baker, J.W., Cornell, C.A.: Vector-valued intensity measures incorporating spectral shape for prediction of structural response. J. Earthq. Eng. 12(4), 534–554 (2008)
Buratti, N.: Confronto tra le performance di diverse misure di intensità dello scuotimento sismico. Congreso Nacional de Ingeniería Sísmica Italiano, ANDIS Bari (2011)
Buratti, N.: A comparison of the performance of various ground-motion intensity measures. In: The 15th World Conference on Earthquake Engineering (2012)
Terán-Gilmore, A.: Consideraciones del uso de la energía plástica en el diseño sísmico. Revista de ingeniería Sísmica SMIS 65, 81–110 (2001)
Bojórquez, E., Ruiz, S.E.: Strength reduction factors for the valley of Mexico taking into account low cycle fatigue effects. In: 13º World Conference on Earthquake Engineering, Vancouver, Canada (2004)
Arroyo, D., Ordaz, M.: Hysteretic energy demands for SDOF systems subjected to narrow band earthquake ground motions. Applications to the lake bed zone of Mexico City. J. Earthq. Eng. 11, 147–165 (2007)
Terán-Gilmore, A., Jirsa, J.O.: Energy demands for seismic design against low-cycle fatigue. Earthq. Eng. Struct. Dyn. 36, 383–404 (2007)
Terán-Gilmore, A., Sánchez-Badillo, A., Espinosa Johnson, M.: Performance-based seismic design of reinforced concrete ductile buildings subjected to large energy demands. Earthq. Struct. 1(1), 69–91 (2010)
Bojórquez, E., Ruiz, S.E., Terán-Gilmore, A.: Reliability-based evaluation of steel structures using energy concepts. Eng. Struct. 30(6), 1745–1759 (2008)
Bojórquez, E., Terán-Gilmore, A., Ruiz, S.E., Reyes-Salazar, A.: Evaluation of structural reliability of steel frames: Inter-story drifts versus plastic hysteretic energy. Earthq. Spectra 27(3), 661–682 (2011)
Uang, C.M., Bertero, V.V.: Evaluation of seismic energy in structures. Earthq. Eng. Struct. Dyn. 19, 77–90 (1990)
Trifunac, M.D., Brady, A.G.: A study of the duration of strong earthquake ground motion. Bull. Seismol. Soc. Am. 65(3), 581–626 (1975)
Eads, L., Miranda, E., Lignos, D.: Spectral shape metrics and structural collapse potential. Earthq. Eng. Struct. Dyn. 45(10), 1643–1659 (2016)
Iervolino, I., Manfredi, G., Cosenza, E.: Ground motion duration effects on nonlinear seismic response. Earthq. Eng. Struct. Dyn. 35, 21–38 (2006)
Terán-Gilmore, A., Jirsa, J.O.: A damage model for practical seismic design that accounts for low cycle fatigue. Earthq. Spectra 21(3), 803–832 (2005)
Rodríguez, M.E., Padilla, C.: A damage index for the seismic analysis of reinforced concrete members. J. Earthq. Eng. 13(3), 364–383 (2008)
Bojórquez, E., Reyes-Salazar, A., Terán-Gilmore, A., Ruiz, S.E.: Energy-based damage index for steel structures. J. Steel Compos. Struct. 10(4), 343–360 (2010)
Acknowledgements
The authors express their gratitude to the Consejo Nacional de Ciencia y Tecnología (CONACYT) in Mexico for funding the research reported in this paper under grant Ciencia Básica 287103 and for the scholarship given to the Ph.D. student. The financial support given by the Universidad Autónoma de Sinaloa under grant PROFAPI is appreciated.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Torres, J.I., Bojórquez, E., Reyes, A., Bojórquez, J. (2021). Vector-Valued Intensity Measures to Predict Peak and Hysteretic Energy Demands of 3D R/C Buildings. In: Benavent-Climent, A., Mollaioli, F. (eds) Energy-Based Seismic Engineering. IWEBSE 2021. Lecture Notes in Civil Engineering, vol 155. Springer, Cham. https://doi.org/10.1007/978-3-030-73932-4_18
Download citation
DOI: https://doi.org/10.1007/978-3-030-73932-4_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-73931-7
Online ISBN: 978-3-030-73932-4
eBook Packages: EngineeringEngineering (R0)