
Abstract
This paper reports on an extensive measurement campaign in a three-storey office building close to a ballasted track on embankment. Dynamic soil characteristics are determined by means of in situ geophysical tests. A coupled Finite Element-Boundary Element (FE-BE) model of the reinforced concrete building, accounting for soil-structure interaction, is updated by means of modal characteristics that were identified using both ambient and forced excitation. The response of the track, the free field and the building is measured simultaneously during impact loading on the sleepers and the passage of freight and passenger trains. A 2.5D coupled FE-BE track model is calibrated based on the measured track receptance and transfer functions. The incident wave field due to impacts on the sleepers and train passages is very sensitive to uncertain dynamic soil properties. This uncertainty explains to a large degree the deviation between the predicted and measured response of the soil and the building.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Railway induced vibration
- Dynamic soil-structure interaction
- System identification
- Model calibration
- Uncertainty
1 Introduction
Numerical prediction of railway induced vibration requires information on track, soil and building parameters which should be identified experimentally. Given the complexity and uncertainty of the problem, in combination with the wide frequency range of interest (1–80 Hz for vibration and 16–250 Hz for structure-borne noise), accurate prediction of railway induced vibration is challenging. This paper reports on an extensive measurement campaign and numerical investigation conducted at the Blok D building, a three-storey reinforced concrete building with below-ground basement located at 40 m from the railway line L1390 Leuven-Ottignies. The latter consists of two ballasted tracks on embankment and is operated by freight and passenger trains (Fig. 1).
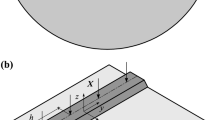
Vibration measurements were performed on the track (on the rail web, above 2 sleepers and at midspan between 2 sleepers; and at 10 consecutive sleeper positions), in the free field (9 locations on 3 parallel lines perpendicular to the track) and in the building (4 triaxial accelerometers on 4 floors), resulting in 84 measurement directions (Figs. 1b and 1c). Transfer functions were determined using impact hammer excitation at 17 sleeper positions equally spaced over a distance of 192 m [2]. The response of the track, free field and building was simultaneously measured during one week, for over 500 freight and passenger train passages.

(a) Blok D building, (b) measurement locations in the free field, (c) measurement locations on the first floor, and (d) cross section of the measurement site.
The measured transfer functions and response to passing trains are compared with numerical predictions and the influence of uncertain dynamic soil characteristics on prediction accuracy is discussed.
2 Dynamic Soil Characteristics
The Blok D building is located in the alluvial plain of the Dijle river consisting of an approximately 6 m thick quaterny layer of loose to dense sand (locally clayey) on top of a tertiary formation consisting of medium to dense sand with sand stone concretions. The ground water table is located at a depth of about 8 m. The dynamic soil characteristics were identified by means of Spectral Analysis of Surface Waves (SASW) tests and Seismic Cone Penetration Tests (SCPT). The data from these tests were combined in a probabilistic Bayesian inversion framework to identify a set of possible soil profiles [4]. Figure 2 shows the maximum a posteriori probability (MAP) soil profile along with 20 other possible realizations. The shear wave velocity of the shallow top layer and below a depth of 15 m, as well as the material damping ratio below 8 m, are highly uncertain.

Realizations of the shear wave velocity \(C_{\mathrm {s}}\), dilatational wave velocity \(C_{\mathrm {p}}\) and shear material damping ratio \(\beta _{\mathrm {s}}\) of the soil at the site of the Blok D building. The MAP soil profile is shown in black. The dotted line indicates the building foundation level.
3 Track and Embankment Characteristics
The ballasted tracks consist of UIC60 rails supported by resilient rubber rail pads and prestressed concrete monoblock sleepers. The rail pads have medium stiffness \(k_{\mathrm {rp}}\) = 150 \(\times \) 10\(^{6}\) N/m and damping \(c_{\mathrm {rp}}\) = 13.5 \(\times \) 10\(^{3}\) N/(m/s). The sleepers have a mass of 300 kg and spacing L = 0.60 m and are supported by a 0.40 m thick porphyry ballast layer, for which a density \(\rho \) = 1800 kg/m\(^{3}\), Poisson’s ratio \(\nu \) = 0.33 and material damping ratio \(\beta \) = 0.025 are assumed. The track is located on top of a 1.90 m high embankment. The dynamic properties of the ballast layer, embankment and top soil layer are unknown.
The shear wave velocity \(C_{\mathrm {s}}\) of the ballast and the width \(l_{\mathrm {c}}\) of the sleeper-ballast contact area are tuned by comparing the measured sleeper mobility with the mobility computed with a periodic FE-BE model, incorporating the track, ballast, and a horizontally layered medium with the embankment and the soil layers [1]. A parametric study is performed and best agreement of the mobility is found for \(C_{\mathrm {s}} = 120 \, \text{ m/s }\) and \(l_{\mathrm {c}} = 0.3 \, \text{ m }\). The dynamic characteristics of the embankment and top soil layer are determined (Table 1) by comparing the measured transfer functions between the sleepers and the free field positions closest to the track (Fig. 1b) with the transfer functions computed with a 2.5D FE-BE model.

Modulus of the average sleeper mobility (solid back line) and 90\(\%\) confidence interval (grey shaded area) computed with the ensemble of 20 soil profiles. Comparison with the 10 measured sleeper mobilities (grey lines).
Figure 3 shows the vertical sleeper mobility measured on 10 consecutive sleepers, demonstrating large variability depending on contact conditions. The sleeper mobility is also computed with the identified characteristics of the ballast, embankment and top soil layer, and an ensemble of 20 soil profiles. A reasonably good correspondance with the experimental values is observed. The 90\(\%\) confidence interval of the sleeper mobility is very small, revealing a negligibly small influence of the uncertain dynamic soil characteristics.

Modulus of the predicted transfer function between a vertical force on the sleeper at \(y=0\) and the vertical velocity at (a) FF-B1-z and (b) FF-B3-z, using the MAP soil profile (solid black line). 90\(\%\) confidence interval of the transfer functions based on 20 identified profiles (grey shaded area). Comparison with the measured (average) transfer function (grey line).
Figure 4 compares the measured averaged vertical transfer function between the sleeper and the free field at two distances from the track (Fig. 1d), with the transfer function computed with a 2.5D FE-BE model including a detailed topography of the embankment and the subsoil; computations are made for 20 identified soil profiles [1]. The measured transfer function lies almost entirely in the 90\(\%\) confidence interval. The latter is wide, revealing a large influence of uncertain soil characteristics.
4 Dynamic System Identification of the Building
The primary structure of the building consists of concrete columns (every 1.5 m in the facades along the y-direction and every 3 m along the main corridor in the basement) and beams supporting the slabs (primary beams along the y-direction in the facades and main corridor; primary beams along the x-direction every 3 m; secondary beams along the x-direction every 1.5 m). This is complemented by concrete and masonry walls, elevator shafts and staircases. The basement and ground floor are connected to an adjacent building by means of walkways.
A FE model of the building is developed in SAP2000 using shell and beam elements [3]. Non-structural elements (floor coverings, masonry infill walls, plasterboard and plywood infill/partitioning walls) are incorporated as far as they contribute to the mass and/or stiffness. The dynamic stiffness of the footings and strip foundations, and the equivalent forces due to incident wave fields, are computed with the BE method. The soil properties under the building are modified to account for the increased stiffness under higher effective stress [3].

Identified and computed global eigenmodes of the Blok D building: (a) first lateral mode with \(f^{\mathrm {exp}}_{1} = 3.37 \, \text{ Hz }\), \(f^{\mathrm {num}}_{1} = 3.38 \, \text{ Hz }\) and \(\xi ^{\mathrm {exp}}_{1} = 0.032\), and (b) first torsional mode with \(f^{\mathrm {exp}}_{3} = 5.12 \, \text{ Hz }\), \(f^{\mathrm {num}}_{3} = 5.11 \, \text{ Hz }\) and \(\xi ^{\mathrm {exp}}_{3} = 0.023\).

Identified and computed vertical floor modes of the Blok D building: (a) first mode with \(f^{\mathrm {exp}}_{1} = 9.14 \, \text{ Hz }\), \(f^{\mathrm {num}}_{1} = 8.28 \, \text{ Hz }\) and \(\xi ^{\mathrm {exp}}_{1} = 0.032\); (b) second mode with \(f^{\mathrm {exp}}_{2} = 10.70 \, \text{ Hz }\), \(f^{\mathrm {num}}_{2} = 10.22 \, \text{ Hz }\) and \(\xi ^{\mathrm {exp}}_{2} = 0.013\); and (c) third mode with \(f^{\mathrm {exp}}_{3} = 11.18 \, \text{ Hz }\), \(f^{\mathrm {num}}_{3} = 11.02 \, \text{ Hz }\) and \(\xi ^{\mathrm {exp}}_{3} = 0.027\).
Ambient vibration measurements with 3 triaxial wireless accelerometers (Geo-SIG) on 5 floors (including basement and roof) were performed to identify the two lowest lateral modes and first torsional mode of the building [5]. Figure 5 shows the mode shape, eigenfrequency and modal damping ratio of the identified first lateral and first torsional mode, together with the mode shapes computed with the updated coupled FE-BE model. Additional ambient and forced vibration (using an impact hammer) tests with 15 GeoSIG units and 7 uniaxial accelerometers were performed to identify 8 vertical floor modes [5]. Figure 6 shows the mode shape (along the main corridor), eigenfrequency and modal damping ratio of the 3 lowest identified vertical floor modes, together with the mode shape computed with the updated FE-BE model. Vertical modes involve coupled motions of the floors. Model updating was applied to identify 15 uncertain building parameters (Young’s moduli of structural materials; floor masses; springs representing connections with an adjacent building), in a multi-stage scheme, using vertical modes computed with a fixed base FE model as well as lateral and vertical modes computed with a coupled FE-BE model [3]. The modal characteristics of the building are significantly affected by dynamic soil-structure interaction.

Measured (solid line) and predicted (dashed line) vertical displacement at flexible points (a) \(V_{1}\) (ground floor) and (b) \(V_{3}\) (second floor) for vertical excitation on the sleeper. \(90\%\) confidence intervals of measured transfer functions and realizations of predictions for different soil profiles are shown in grey.
Figure 7 shows the measured and predicted transfer functions between the force applied on a sleeper in front of the building and the displacements at points close to midspan of two floors in the building. The uncertainty on the measured transfer functions is relatively low. The predicted and measured FRFs have the same order of magnitude, but the accuracy of the predicted transfer functions decreases for increasing frequency. The realizations of the predicted transfer functions for different soil profiles suggest that a significant part of the observed discrepancy can be explained by uncertain subsoil conditions; the latter affect both the dynamic stiffness of the coupled soil-structure system and the incident wave field that impinges on the building. Part of the uncertainty can also be attributed to modelling uncertainty.

(a) Time history and (b) frequency spectrum of the dynamic axle load of the first axle of the first (grey line) and third (black line) bogie of a Desiro MS08 train at 81 km/h.

One-third octave band spectrum of the vertical free field velocity at points (a) FF-B1-z and (b) FF-B3-z during the passage of a Desiro MS08 train at 81 km/h, predicted with the MAP soil profile (black), profile 1 (blue) and profile 6 (red), and compared with the measured response (grey).
5 Railway Induced Vibration
Most passenger trains are of the Desiro MS08 type and have 3 carriages. This train is modelled by means of 6 uncoupled bogie models, each consisting of 7 degrees of freedom: the vertical displacements of the car body, the bogie, two wheel sets and two wheel-rail contact points, and the pitch rotation of the bogie [1]. Rail unevenness was measured by Infrabel one week before the measurement campaign, revealing a track of moderate to poor quality [1]. Figure 8 shows the time history and frequency spectrum of the dynamic axle load at two bogies of a train running at 81 km/h, computed with a periodic track model coupled to the MAP soil profile [1]. The peak between 1 and 2 Hz corresponds to the resonance between the car body and the secondary suspensions, and the peak around 6 Hz due to the resonance of the bogie between the primary and secondary suspensions; the sleeper passing frequency is observed around 37.5 Hz.
Figure 9 compares the one-third octave band spectrum of the measured and predicted vertical velocity in the free field at two distances from the track during the passage of a Desiro MS08 train at 81 km/h; the measured vibration is very similar for different passages. Computations are made with a 2.5D coupled FE-BE model for the MAP soil profile, as well as for identified soil profiles 1 and 6, with a soft and stiff top layer, respectively [1]. The computed results differ by up to more than 10 dB for the different soil profiles, while the measured response lies between these results at most frequencies. Soil profile 1 generally results in higher free field vibration than soil profile 6. At low frequencies, the results computed with the three soil profiles underestimate the measured vibration. At the point B3, a larger discrepancy is found which is probably due to the presence of the building, which is not incorporated in the model. Figure 10 compares the one-third octave band spectra of the measured and predicted vertical velocity at two flexible locations in the building during the same passage. The uncertain soil properties result in a variation of the predicted response of up to 10 dB, particularly at higher frequencies.

One-third octave band spectrum of the vertical velocity at the receivers (a) \(V_{1}\) (ground floor) and (b) \(V_{3}\) (second floor) during the passage of a Desiro MS08 train at 81 km/h, predicted with the MAP soil profile (black), profile 1 (blue) and profile 6 (red), and compared with the measured response (grey).
6 Conclusion
Railway induced vibration was measured on the track, in the free field and in a building. These data were used to calibrate and validate numerical models for the railway induced vibration. The measured and predicted response show significant difference, which can partly be explained by uncertain soil properties.
References
Germonpré, M.: The effect of parametric excitation on the prediction of railway induced vibration in the built environment. Ph.D thesis, Department of Civil Engineering, KU Leuven (2018)
Kuo, K., Germonpré, M., Maes, K., Degrande, G., Lombaert, G.: Processing of vibration measurements at the Blok D building of the administrative complex of KU Leuven. Report BWM-2017-20, Department of Civil Engineering, KU Leuven, Project OT/13/59 (2017)
Papadopoulos, M.: Influence of dynamic SSI on the building response to ground vibration. Ph.D thesis, Department of Civil Engineering, KU Leuven (2018)
Verachtert, R.: Deterministic and probabilistic determination of dynamic soil characteristcs. Ph.D thesis, Department of Civil Engineering, KU Leuven (2018)
Zhang, J.: Numerical analysis and experimental assessment of the dynamic characteristics of periodic structures. Ph.D thesis, Department of Civil Engineering, KU Leuven (2019)
Acknowledgements
This research was performed within the frame of the project OT/13/59 “Quantifying and reducing uncertainty in structural dynamics” funded by the Research Council of KU Leuven. KK was and KM is a postdoctoral researcher, while MG and RV were PhD students, all funded by FWO Flanders.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Papadopoulos, M. et al. (2021). Numerical Prediction and Experimental Validation of Railway Induced Vibration in a Multi-storey Office Building. In: Degrande, G., et al. Noise and Vibration Mitigation for Rail Transportation Systems. Notes on Numerical Fluid Mechanics and Multidisciplinary Design, vol 150. Springer, Cham. https://doi.org/10.1007/978-3-030-70289-2_57
Download citation
DOI: https://doi.org/10.1007/978-3-030-70289-2_57
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-70288-5
Online ISBN: 978-3-030-70289-2
eBook Packages: EngineeringEngineering (R0)