
Abstract
Although smart textile materials have significant importance because of their advanced technology, they haven’t replaced the conventional electronics completely. Nevertheless, these smart textile materials are now developed into the fabrication of in-situ structural health monitoring systems for structures and wearable technologies. The objective of this study was to develop a flexible microscale conductive fiber for in-situ strain monitoring applications by depositing uniform coating film of silver (Ag) nanoparticles on the surface each filament of nylon yarn by electroless plating process without jeopardizing the integrity of each material. The sensitivity of this Nylon/Ag conductive fiber was calculated experimentally, and the gauge factor (GF) was found to be in the range of 21–25 which showed a high sensitivity of the conductive fiber to the applied strain. Then, Nylon/Ag conductive fiber was fractured under tensile loading and a good agreement between the electromechanical response of the conductive fiber was found with repeatability of the results. Then, this Nylon/Ag conductive fiber was inserted in composite specimens at four different directions i.e. 0°, +45°, and 90° respectively in each ply and specimen was machined in a star shape in which each leg represented the direction of the individual position of the Nylon/Ag conductive fiber. The composite star specimen was then subjected to tensile cyclic loading and results showed excellent reproducibility in the mechanical behavior of composite specimens and electrical signals of each conductive fiber although, the conductive fiber in each position showed distinct response because of their respective direction. The increase or decrease in the resistance of the fiber sensor signified the presence of tensile or compressive strain respectively and the intensity of the signal quantified the amount of deformation. The results demonstrated the way to design a cost-effective microscale smart textile for strain monitoring. This Nylon/Ag conductive fiber can then be used in in-situ structural health monitoring even in high strain applications because of their good sensitivity, flexibility, and stability.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Composites have substituted traditional materials in almost every engineering and structural application because of their extraordinary mechanical performance and cost-effectiveness however, even they have limitations and are prone to damage [1]. So, it is essential to examine and monitor their behavior during working conditions to avoid sudden failure [2]. Structural health monitoring (SHM) is a well-known technique widely used to study and monitor the performance of the composites and other materials in working conditions to ensure safe and reliable structures [3]. These monitoring systems and sensors were established progressively over time from non-destructive methods to in-situ monitoring of materials [4, 5]. In-situ monitoring systems had been frequently designed for detecting various types of failures in structural components to ensure their durable service life [6, 7]. Similarly, numerous studies examined the strain deformation and failure sensing of the composites using different SHM methods under tensile elongation however, very little or no information was available about the influence of the location of the sensor on their sensitivity and damage detection [8]. Furthermore, it was vital to understand the sensing response of the sensor to differentiate between the types of damage during tensile deformation.
Flexible smart textiles were considered to be a favorable alternative for the SHM of structural composites because after insertion, they could not only monitor the deformation of the structure but also act as reinforcement [9, 10]. Conductive polymers were first used for real-time monitoring of composites however, their conductivity was less as compared to nanoparticles and they were unstable under environmental effects [11, 12]. Likewise, inserting or coating conductive nanoparticles on polymeric yarns were also considered for in-situ SHM of structures [13]. CNTs based fibers were used numerous times for in-situ structural health monitoring of composites because of their outstanding performance however, their sensitivity could be affected after insertion into the composite structures because of their porous network and tunneling effect [14,15,16,17]. In addition, reduced graphene oxide (RGO) based sensors also showed good flexibility, sensitivity with good stability in in-situ monitoring of high strain applications and did not show any resin penetration because of their surface and geometry conformability [14]. However, RGO is toxic in nature and had stability issues when exposed to air [18, 19]. Furthermore, metal nanoparticles were also used for in-situ SHM application but among all, silver (Ag) had great potential as a coating material on flexible substrates because of its stability in the air, competitive price, good conductivity and mechanical performance [20,21,22,23]. However, no or very little information is available regarding the use of flexible sensor wires for multi-mode detection of strain deformation in composites subjected to tensile deformation for application in larger and unapproachable structural areas [24].
Accordingly, an experimental study was conducted to examine the in-situ monitoring capability of the Nylon/Ag fiber sensor for the deformation of composite material during repeated tensile loading. In addition, the response of the fiber sensor was also studied to distinguish between different types of deformations by placing them in different directions i.e. 0°, +45°, 90°, −45° regarding the loading axis and fiber sensor in individual positions were separated by the single-ply in all three specimens. The Nylon/Ag fiber sensor was fabricated by electroless plating and then integrated within the composite samples at their respective position and direction during the fabrication process. Afterward, samples were tested experimentally on INSTRON-50 under cyclic tensile loading one by one and their strain deformation was monitored by correlating its mechanical behavior with the response of each fiber sensor. The results presented interesting behaviors and indicated that the fiber sensor did not only monitored the deformation in each cycle but also demonstrated that the location and direction of the sensor played an important part in differentiating between different types of damage and in quantifying them.
2 Methodology
2.1 Fabrication Process
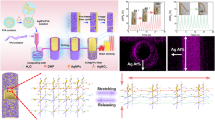
Nylon/Ag fiber sensors were developed by depositing Ag nanoparticles as a uniform continuous film on every filament of Nylon by using an electroless plating process [22, 23], (see Fig. 1). Then the fiber sensor was inserted between the plies of chopped glass fibers in their respective position and direction during the fabrication of the composite specimen. The chopped fiber mat ensured isotropic mechanical behavior with poor conductivity and electrical isolation for each fiber sensor. Nylon/Ag fiber sensors were inserted in the specimen in their particular direction such that sensor A was in 0° between plies 1 and 2, sensor B was in 45° between plies 2 and 3, sensor C was in 90° between plies 3 and 4 and sensor D was in −45° between plies 4 and 5 from bottom to top. After the mixture of resin and hardener was added into the mold and after the curation process of 48 h at room temperature, full insertion of fiber sensors was achieved in each specimen. The specimens were machined using CNC (Computer numerical control) machine in a star shape in which each leg represented the direction and placement of the fiber sensor, (see Fig. 2).

SEM of Nylon/Ag fiber sensor after fabrication [25] wire

(a) The composite samples turned transparent after the fabrication and embedded Nylon/Ag fiber sensors were visible in each leg. (b) Geometric Parameters and dimensions of the star specimen
2.2 Experimentation
The star specimen was placed between the fixtures in the INSTRON-50 machine in such a manner that sensor A was along the loading axis and the data acquisition system was attached to the electrode wires connected to the Nylon/Ag fiber sensors, (see Fig. 3). It was vital to ensure that the sample was positioned properly among the fixtures and the electrical connections were isolated from any metallic part of the machine to avoid any external influence on the electrical response of the fiber sensors. Then, the test was performed at a low strain rate i.e. 5 mm/min up to 15 kN to avoid any permanent deformation and each test was performed for 10 cycles. The mechanical response of the specimen with the electrical profile of all four fiber sensors was obtained.

Setup to examine the in-situ monitoring performance of the Nylon/Ag fiber sensor when integrated within the composite sample during a tensile test.
3 Results and Discussion
3.1 Mechanical Behavior of Composite Star Specimen
First, it is important to understand the strain deformation of the composite under cyclic tensile loading to apprehend the strain detection by all three sensor systems, (see Fig. 4). One leg of the star specimen was fixed between the fixtures of the machine and the other legs were free. The loading axis was considered as the reference and sensor place in this direction was at 0° and labeled as sensor A. When the specimen was loaded, tensile stresses were produced in 0° and compression stresses were produced in 90° i.e. transverse direction. In addition, it was understood that the combined effect of tensile and compression stresses is generated in oblique direction i.e. +45°. However, in test 1 and 2, samples were placed between the fixtures in such manner that the leg of the star sample consisting of sensor A was along the loading axis i.e. in 0° and in test 3, the sample was placed in a way that the leg of the composite sample consisting of sensor C was along the loading axis i.e. in 0°, sensor A in 90° and sensor B & D interchanged their position for all three sensor systems, (see Fig. 5). The step to interchange the positions of the sensor in test 3 was conducted to examine the load sensitivity of each sensor system and it didn’t affect the comparison of the mechanical performance of the composite samples. Three composite specimens were tested for each sensor system successfully, and mechanical behavior was plotted as elastic modulus and overall initial stress-strain curve which showed good repeatability in the behavior. Figure 6 shows a comparison of three samples and results confirmed that the mechanical behavior of all composite samples was similar irrespective of the choice of the loaded leg or the sensor system and was isotropic because of the use of the chopped glass fiber mat. The presence of any sensor system in different directions and positions did not affect the structure’s integrity. Moreover, the mechanical behavior of all the three star-samples was similar to each other regardless of the placement of the specimen. This further confirmed that the placement of fiber sensors at different positions [21] and directions did not influence the mechanical behavior and integrity of the composite sample and its isotropic nature.

Star Specimen with (a)–(b) Geometrical illustration of the placement of sensor systems in their individual sample i.e. in individual leg and through-thickness (section view) correspondingly.

Position of the composite star samples between the fixture for tensile loqding: (a) Sample placement in tests 1 and 2, (b) Sample placement in a test.

Mechanical behavior of all three star-samples. (a) Elastic modulus (b) Overall tensile stress-strain behavior
3.2 In-situ Monitoring and Identification of Strain Deformation by Nylon/Ag Fiber Sensor
Nylon/Ag strain sensor wire showed good electrical signal response during all three mechanical tests of the composite star specimen. The resistance was changing in each case with the gradual increase of the load and the fiber sensor showed a similar response in all 4 directions i.e. 0°, +45°, and 90°. The electrical response of each Nylon/Ag fiber sensor showed a change of resistance with an increase of strain in the specimen, however, during deformation the strain sensor wire within the specimen showed different behavior because of its position and direction regarding the loading axis. This showed that it not only monitored the deformation but, also identified it as to whether it was compressive, tensile, or both. Test 1 and test 2 were performed by placing the specimen in such a way that sensor A was in the loading direction and sensor C was in the transverse direction while in test 3, the specimen was placed in such a way that sensor C was in the loading direction and sensor A was in the transverse direction. The cyclic tensile test further confirmed the reproducibility of electrical response and the real-time strain monitoring behavior of the Nylon/Ag fiber sensor under the 10 cycles of tensile load. This showed that the Nylon/Ag fiber sensor also had stability in the detection response and long-term response cycle. This also verified that this fiber sensor can be reused unless it is fractured even then; the divided part of the sensor wire could be used as a sensor for damage detection. During the applied cyclic strain as high as between 1–2% and for 10 cycles, the Nylon/Ag fiber sensor perfectly correlated with the applied strain in each cycle. This confirmed the durability and stability of the sensor.
-
Test 1 and Test 2 confirmed the reproducibility of electrical response and the real-time strain monitoring behavior of the Nylon/Ag fiber sensor. All sensors A, B, C, and D showed changed in resistance during the deformation and correlated perfectly in both tests, (see Fig. 7). Moreover, it was observed that the maximum increase in resistance was recorded by sensor A which confirmed maximum tensile deformation occurred in the loading direction. However, sensor C showed a decrease in resistance and this negative behavior confirmed the presence of compressive stress and deformation which established the Poisson’s effect during the deformation of the structure. The compression strains are dominant in the transverse direction while very less tensile strain present. That is why, the sensor in the C leg showed decrease in resistance detecting the presence of compressive strains. The minimum change in resistance was recorded by sensors B and D and both sensors showed identical responses. This identical response of sensors B and D was because in isotropic material, these two directions are a mirror of each other regarding the loading axis. However, slight diminution with less than 1% was recorded for the sensor A in comparison with the sensor B, C, and D. This reduction was negligible in comparison to the overall behavior during the cyclic loading. Nevertheless, the reason behind this behavior of sensor A was because sensor A was placed in the loading direction and was experiencing the maximum effect of the applied strain. Moreover, the applied cyclic strain was applied between 1–2% which is within the plastic deformation regime. Sensor A might experience minute permanent deformation during cyclic tensile and compressive strain because of the Poisson’s effect during the loading and unloading of the cyclic load.
Fig. 7. 
Real-time strain (ST) monitoring by Nylon/Ag fiber sensor in the composite star specimen during cyclic tensile loading. In both tests 1 (T1) and 2 (T2), sensor A (SA) was along the loading axis, sensor B (SB) at 45, sensor C (SC) at 90° and sensor D (SD) in −45°.
-
Test 3 was performed and compared with Test 1 to check the sensitivity of the Nylon/Ag fiber sensor with respect to the loading axis, (see Fig. 8). This comparison was carried out to not only confirm the strain detection response of the Nylon/Ag fiber sensor but also showed its sensitivity to the applied load or loading direction. Sensor C recorded the maximum increase in resistance in test 3 because it was placed in the loading direction while sensor A showed a decrease in resistance because it was in a transverse direction regarding the loading axis. However, sensors B and D showed similar behavior in both tests because of their identical response in both directions i.e. +45°. Moreover, it was observed that the change in resistance was the same in each direction in both tests irrespective of the sensor. For example, sensor A in test 1 and sensor C in test 3 showed a similar change in resistance because both placed along the loading axis. This confirmed that the sensitivity of the sensor was dependent on its position and direction of the applied load otherwise the response of each sensor A, B, C, and D can be similar, and, in every case, the strongest signal was recorded along the loading direction.
Fig. 8. 
Real-time strain monitoring by Nylon/Ag fiber sensor during cyclic tensile strain. In test-1 (T1), sensor A (SA) was along the loading axis, sensor B (SB) at 45, sensor C (SC) at 90° and sensor D (SD) in −45° while in test-3 (T3) the specimen was placed transversely with respect to the specimen 1 and sensor C (SC) was along the loading axis, sensor D (SD) at 45, sensor A (SA) at 90° and sensor B (SB) in −45°.


In each specimen, the sensor did not only detect the deformation but also distinguished between the type of deformation whether it was tensile or compression.
4 Conclusion
An experimental study was performed in this research to examine and understand the application of a Nylon/Ag fiber sensor in in-situ monitoring and identification of strain deformation in composites under cyclic tensile deformation. Nylon/Ag fiber sensor was integrated within the composite specimen at specific direction and position to demonstrate the strain detection behavior of the Nylon/Ag fiber sensor and identification of different types of deformation which occurred during tensile deflection. The experimental results showed good repeatability in the mechanical performance of the composite structures and response of the fiber sensor in the monitoring of the deformation. Each fiber sensor showed individual response signals during the deformation of the composite specimen because of their specific position and direction. This distinct behavior of each fiber sensor confirmed the detection of different types of damage i.e. tensile or compression during the deformation and different intensity or magnitude of the signals quantified the amount of damage induced. Thus, each fiber sensor not only showed the detection of different types of deformation but also quantified the deformation. The Nylon/Ag fiber sensor demonstrated good potential as a flexible reinforcement in composite materials for in-situ monitoring of strain because the applied strain was up to 1–2% for 10 cycles and the Nylon/Ag fiber showed the perfect correlation of its signal with the applied strain in each cycle. This verified the stability and durability of this fiber sensor.
References
Tarfaoui, M., Nachtane, M., El Moumen, A.: Energy dissipation of stitched and unstitched woven composite materials during dynamic compression test. Compos. Part B Eng. 167, 487–496 (2019)
Pang, J.W.C., Bond, I.P.: A hollow fibre reinforced polymer composite encompassing self-healing and enhanced damage visibility. Compos. Sci. Technol. 65, 1791–1799 (2005)
Ihn, J.-B., Chang, F.-K.: Pitch-catch active sensing methods in structural health monitoring for aircraft structures. Struct. Heal. Monit. 7, 5–9 (2008)
Loayssa, A.: Optical fiber sensors for structural health monitoring. In: Mukhopadhyay, S.C. (ed.) New Developments in Sensing Technology for Structural Health Monitoring, pp. 335–358. Springer, Heidelberg (2011). https://doi.org/10.1007/978-3-642-21099-0_14
Raghavan, A.C., Cesnik, C.: Review of guided-wave structural health monitoring. Shock Vib. Dig. 39, 91–114 (2007)
Sassi, S., Tarfaoui, M., Yahia., H.B.: In-situ heat dissipation monitoring in adhesively bonded composite joints under dynamic compression loading using SHPB. Compos. Part B Eng. 54, 64–76 (2018)
Tarfaoui, M., Moumen, A.E. Yahia., H.B.: Damage detection versus heat dissipation in E-Glass/Epoxy laminated composites under dynamic compression at high strain rate. Compos. Struct. 186, 50–61 (2018)
Azhari, F., Banthia, N.: Cement-based sensors with carbon fibers and carbon nanotubes for piezoresistive sensing. Cem. Concr. Compos. 34, 866–873 (2012)
Trifigny, N., et al.: PEDOT: PSS-based piezo-resistive sensors applied to reinforcement glass fibres for in situ measurement during the composite material weaving process. Sensors 13, 10749–10764 (2013)
Atalay, O., Kennon, W.R.: Knitted strain sensors: impact of design parameters on sensing properties. Sensors (2014)
Seyedin, S., et al.: Knitted strain sensor textiles of highly conductive all-polymeric fibers. ACS Appl. Mater. Interfaces 7, 21150–21158 (2015)
Jerkovic, I., Koncar, V., Grancaric, A.: New textile sensors for in situ structural health monitoring of textile reinforced thermoplastic composites based on the conductive poly(3,4-ethylenedioxythiophene)-poly(styrenesulfonate) polymer complex. Sensors 17 (2017)
Nauman, S., Cristian, I., Boussu, F., Koncar, V.: Smart Sensors for Industrial Applications. Part V Piezoresistive, Wireless, and Electrical Sensors (2013). Iniewski, K. (ed.)
Cai, G., et al.: Flexible and wearable strain sensing fabrics. Chem. Eng. J. 325, 396–403 (2017)
Nag-Chowdhury, S., et al.: Crossed investigation of damage in composites with embedded quantum resistive strain sensors (sQRS), acoustic emission (AE) and digital image correlation (DIC). Compos. Sci. Technol. 160, 79–85 (2018)
Alamusi, et al.: Piezoresistive strain sensors made from carbon nanotubes based polymer nanocomposites. Sensors 11, 10691–10723 (2011)
Wang, G., et al.: Structure dependent properties of carbon nanomaterials enabled fiber sensors for in situ monitoring of composites. Compos. Struct. 195, 36–44 (2018)
Barnard, A.S.: Modelling of the reactivity and stability of carbon nanotubes under environmentally relevant conditions. Phys. Chem. Chem. Phys. 14 (2012)
Murray, A.R., et al.: Oxidative stress and inflammatory response in dermal toxicity of single-walled carbon nanotubes. Toxicology 257, 161–171 (2009)
Kim, K.-S., et al.: Revisiting the thickness reduction approach for near-foldable capacitive touch sensors based on a single layer of Ag nanowire-polymer composite structure. Compos. Sci. Technol. 165, 58–65 (2018)
Qureshi, Y., Tarfaoui, M., Lafdi, K.K., Lafdi, K.: Development of microscale flexible nylon/Ag strain sensor wire for real-time monitoring and damage detection in composite structures subjected to three-point bend test. Compos. Sci. Technol. 181, 107693 (2019)
Qureshi, Y., Tarfaoui, M., Lafdi, K.K., Lafdi, K.: Real-time strain monitoring performance of flexible Nylon/Ag conductive fiber. Sens. Actuators A Phys. 295, 612–622 (2019)
Qureshi, Y., Tarfaoui, M., Lafdi, K.K., Lafdi, K.: Real-time strain monitoring and damage detection of composites in different directions of the applied load using a microscale flexible Nylon/Ag strain sensor. Struct. Heal. Monit. 19, 885–901 (2019)
Qureshi, Y., Tarfaoui, M., Lafdi, K.K., Lafdi, K.: Nanotechnology and development of strain sensor for damage detection. In: Advances in Structural Health Monitoring. InTech Open (2019)
Qureshi, Y., Tarfaoui, M., Lafdi, K.K., Lafdi, K.: In-situ monitoring, identification and quantification of strain deformation in composites under cyclic flexural loading using Nylon/Ag fiber sensor. IEEE Sens. J. 20, 1 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Qureshi, Y., Tarfaoui, M., Lafdi, K.K., Lafdi, K. (2021). In-situ Strain Monitoring Performance of Flexible Nylon/Ag Conductive Fiber in Composites Subjected to Cyclic Tensile Loading. In: Rizzo, P., Milazzo, A. (eds) European Workshop on Structural Health Monitoring. EWSHM 2020. Lecture Notes in Civil Engineering, vol 127. Springer, Cham. https://doi.org/10.1007/978-3-030-64594-6_69
Download citation
DOI: https://doi.org/10.1007/978-3-030-64594-6_69
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-64593-9
Online ISBN: 978-3-030-64594-6
eBook Packages: EngineeringEngineering (R0)