
Abstract
This paper presents an integrative approach to adaptive structures, which harnesses the scale and strength of natural material actuators such as wood as well as the functional physical programming of material properties enabled by 3D-printing. Passively actuated adaptive systems represent a growing field within architecture, and wood’s innate capacity for hygroscopic responsiveness can be instrumentalized for use as a natural actuator; however, the internal compositions of wood cannot be fully customized. With 3D-printing, it is possible to tailor the internal substructure of physical objects. We introduce a material programming and additive fabrication method for designing macro-scale objects with anisotropic stiffness and elasticity of varying magnitudes using functional patterns, and embedding natural wood actuators into the synthetic 3D-printed structures. In place of electronics and digital control, movement is encoded in the physical material and fabrication logic—demonstrating how self-shaping biohybrid components can emerge from a synergy of natural and synthetic materials.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Material programming
- Additive manufacturing
- Mechanical metamaterials
- Bio-based actuation
- Autonomous systems
1 Introduction
Passively actuated adaptive systems represent a growing field in architecture and engineering. Many bio-based materials have the capacity to change shape based on external environmental stimuli such as heat or humidity. Wood is a sustainable, readily available, easily machinable, and high-performance construction material with a natural capacity for moisture-induced and direction-dependent swelling and shrinking. By accessing this inherent hygroscopic and orthotropic behavior in a bilayer configuration, wood becomes a natural actuator that can produce shape changes in curvature through bending [12]. This adaptiveness alludes to the potential for buildings to be more in tune with the fluctuating climate by automatically self-shading, self-ventilating, and self-stiffening in response to environmental changes [11]. At the same time, when used at increased size and thickness, wood can be employed as a self-shaping mechanism for the manufacture of curved timber components and larger structures [4, 6].
The structural properties of wood specific to shrinking and swelling can be adjusted through densification, delignification, or chemical treatment. As a natural material, however, its stark anisotropic behavior within a sheet stock cannot be fully customized [3, 5]. Tailoring the direction of hygroscopic actuation can be achieved by combining multiple boards into larger parts, but there are limits due to the existing structure of the material [14, 15].
Meanwhile, 3D-printing has enabled the tuning of material properties and functionalities through the manufacture of compliant mechanisms with tailored internal substructures. 3D-printed mechanical metamaterials with a range of functions, from elastic patterns [9] to double curvature [7] to thermally actuated mechanisms [1], have been researched; but existing literature shows that these laboratory prototypes lack the scale, high swelling force, and actuation speed necessary for some building applications.
Macro-Scale Self-shaping Biohybrid Components. We introduce an integrative approach to adaptive structures, which harnesses the scale and actuation strength of wood bilayer actuators as well as the functional programming of varying stiffnesses and elasticities (of defined magnitudes and anisotropies) that extrusion-based 3D-printing enables. Utilizing industrial robotic arms, 3D-printing has already been proven at larger scales [13, 16]; it is also possible to 3D-print a working quadcopter drone with an embedded motherboard and other electronic components [8]. But in place of electronics and digital control, we encode movement in the physical material and fabrication logic.
Through iterative investigations, we assessed the effect of meso-scale [2] functional patterns on macro-scale objects, and explored the tectonic integration between natural and synthetic parts. Finally, we deployed our additive fabrication strategy at full scale, producing meter long components with thicknesses up to 8 cm which are capable of autonomous, shape-changing behaviors.
2 Results
2.1 Functional Patterns for 3D-printing

Functional parameters include (A) pattern height, (B) resolution, (C) grid distribution, (D) amplitude, and (E) frequency. Shown here are the designed behaviors of (F) an isotropic pattern, deforming equally in the X and Y axes, and (G) an anisotropic pattern, deforming only in the Y axis, under a 15 N tension force. Bending bias can be tuned via anisotropy and thickness, as exhibited by testing coupons with one edge on a pin joint and string pulling from the free edge (allowing rotational freedom in the XZ plane): patterns having (H) variable height and anisotropy in the Y direction and (I) anisotropy in the Y direction buckle under a 1 N force, while (J) a pattern with anisotropy in the X direction resists bending of up to 5 N forces.
We formulated a method for producing designed material behaviors within a macro-scale object, in which desired material properties are encoded into the physical matter through meso-scale 3D-printed functional patterns. Using fused filament fabrication (Tec 4 3D-printer, FELIX, Utrecht, Netherlands), we extruded functional patterns at 0.1 mm precision and created a catalogue of functional patterns for stiffness (out-of-plane bending) and elasticity (in-plane stretching) with tunable magnitudes and tailored anisotropies. As the baseline, we employed a Cartesian grid that can vary in distribution between the axes; functional patterns were instantiated in a two-dimensional array. Different behaviors were achieved by programming the pattern height (Z thickness), resolution (XY density), grid distribution (anisotropic XY spacing), and the geometry of wavy structures that act as mechanisms for allowing stretching and compression (Fig. 1 A–E). To maintain the best possible mechanical properties, the patterns were translated into a continuous, interwoven, and 3D-printable toolpath.
Materials and Methods for Evaluation. To understand how the functional patterns cause bending and stretching, tests were conducted using thermoplastic copolyester filament (FlexiFil, FormFutura, Nijmegen, Netherlands) with a 0.5 mm extruded width. Physical coupons with dimensions of 50 mm \(\times \) 50 mm \(\times \) 5 mm and 50 mm \(\times \) 25 mm \(\times \) 5 mm were used to evaluate in-plane stretching and out-of-plane bending, respectively. We quantified the material properties of our physical samples by incrementally applying force with a spring scale (Medio-Line Spring Scale 40025, Pesola, Schindellegi, Switzerland), causing either pulling or deflection.
Analysis of Material Behavior. The amount of in-plane deformation is impacted by the geometry of wave patterns; the frequency and amplitude of the waves affect how much the object can stretch and compress (Fig. 1 F). These parameters can also vary orthogonally to promote anisotropy (Fig. 1 G). Varying the distributions between orthogonal directions will increase bending stiffness in one direction, while promoting flexural compliance and thus out-of-plane bending in the other direction. We found that under the same pulling force, high anisotropy in the direction of loading resists bending (Fig. 1 J) while the opposite anisotropy facilitates bending in the same direction (Fig. 1 I). The thickness of material distributions along each direction additionally tunes the measure of compliance (Fig. 1 H).
2.2 Strategy for Integrating Wood Bilayer Actuators

Integrating natural and synthetic materials necessitates the mediation between discrete parts to work together as one entity. A biohybrid component containing one wood bilayer actuator (A) can display multiple functionalities across areas, transitioning from patterns for anisotropic bending to stretching. Material properties for wood-plastic integration and the interface of their associated patterns can be assigned using a number of strategies; illustrated are designs with (B) two wood actuators of opposing bending orientations and (C) four actuators arranged in radial symmetry. Captured at 40% RH, shown here are (D) the control sample, (E) an integrated sample with strategic patterning, and (F) an integrated sample with non-differentiated patterning.
The biohybrid components gain their self-shaping abilities through natural wood bilayer actuators embedded within the synthetic 3D-printed armature. Although performing discrete functions, each material is programmed to work with the other (Fig. 2 A–C). As a wood bilayer actuator bends in one direction, its 3D-printed armature should be flexible enough to permit unhindered bending in that direction; the neighboring functional patterns should also be aligned to transfer loads in the direction orthogonal to bending. From another perspective, the wood bilayer actuator provides structural integrity in the direction where the 3D-printed armature is weakest, while the surrounding functional patterns enable the wood bilayer actuators to extend its area of influence. To fuse the wood-plastic interface as a holistic entity and prevent damage due to stress concentrations where wood meets plastic, we increase the 3D-printing flow rate of functional patterns surrounding the wood bilayer actuator.
Materials and Methods for Evaluation. We evaluated the integration of the natural and synthetic parts by comparing biohybrid components to a naked wood bilayer actuator. The biohybrid samples (150 mm \(\times \) 150 mm) were embedded with 150 mm \(\times \) 30 mm sized wood bilayer actuators. A naked sample with a single wood bilayer actuator of the same size acted as the control for this experiment. The wood bilayer actuators used in these experiments were constructed out of maple veneer and calibrated to be flat at 70% relative humidity (RH). We compared the shape change of both sample types through image captures, by measuring the bending radii of the wood bilayer actuators at ambient conditions (40% RH).
Analysis of Tectonic Integration. Deviations between the values of the embedded and naked samples were reduced with anisotropic material programming, demonstrating that 3D-printed functional patterns can allow its wood actuator to deform with minimized impediments (Fig. 2 D–F). Biohybrid samples with non-differentiated patterning showed that the 3D-printed armature creates a resistance to the shape change (Fig. 2 F). Anisotropy was used to eliminate (as much as possible) this resistance, and promote flexibility in the direction of bilayer bending; furthermore, programming the 3D-printed armature to stretch and compress (as each side of the bilayer expands and contracts in response to humidity) also aids in the movement (Fig. 2 E).
2.3 Multi-material Additive Fabrication and Actuation

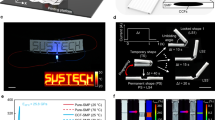
The additive fabrication strategy was transferred to full scale using robotic extrusion. The production of a biohybrid leg required (A) enough flexibility in the direction of bending, but also (B) high stiffness to transfer loads and support self-weight. Extrusion paths were kept as continuous as possible, (C) following an alternating layer-by-layer logic of diagonal cross-hatching to maximize mechanical performance. The fabrication sequence involved creating containers (D) which indicate the placement of wood actuators as well as provide for them a secure enclosure.
To produce the biohybrid components, we devised a fabrication technique for embedding wood bilayer actuators made from maple and spruce within 3D-printed armatures of designed material properties. This requires the synthesizing of multiple materials and processes into one sequence.
Fabrication Logic and Sequence. We equalized the wood moisture content (WMC) of the wood bilayer actuators in a RH controlled box (MiniOne Humidity Generator, Preservatech, Bydgoszcz, Poland) to obtain a flat surface, while also preparing the printing environment with the same RH. Once equalized, the wood bilayer actuators could be laser-cut or milled to tolerance, and then returned to the RH controlled box until starting fabrication. We began the fabrication procedure by 3D-printing the functionally patterned armature until the height of the wood bilayer actuators, leaving voids which indicate their placement. This ensures that the correct locations for each wood bilayer actuator will be easily identified. At this stage, extrusion was paused while the wood bilayer actuators were inserted by hand into their designated voids. Flush with the top of the already 3D-printed parts, the wood bilayer actuators provided a level surface for resuming the 3D-printing. The job was completed by 3D-printing the remaining layers, encasing the wood bilayer actuators and encoding the component with anisotropic stiffnesses, variable thicknesses, and shape-changing behaviors. The completed pieces are then actuated by changing the RH of the surrounding environment, activating the wood bilayer actuators and inducing shape change.
Large-Scale Additive Fabrication. As a proof of concept, we also employed our additive fabrication strategy at full scale using robotic extrusion (Universal Robot UR5 with BAK Extruder Micro) to produce a set of large-scale (100 cm \(\times \) 50 cm \(\times \) 8 cm) prototypes. As robot arms afford more freedom in end effectors and motion planning, wood bilayer actuators can be inserted using pick-and-place automation (instead of manual placement) and encased using three-dimensional toolpaths (instead of 2.5D extrusion). Here the focus was on tuning the local bending stiffnesses by mediating between actuator placement and containment, height, and grid distribution of the armature (Fig. 3 A–D). This study demonstrates how these methods for creating self-shaping behaviors are adaptable for larger scale production (Fig. 4 A–E) via a combination of 3D-printed functional patterns and integrated wood bilayer actuators.

The biohybrid leg was fabricated with a robotic arm (A) equipped with an end effector for large format extrusion (B). At 10% WMC, the wood bilayer actuator is flat and thus can be embedded (C). Three biohybrid legs were assembled to form a shape-changing tripod (D); exposure to higher humidity environments activates the wood bilayers, shown here curving at 20% WMC and shaping the entire structure (E).
3 Conclusion
Through an integrative approach to material programming and additive fabrication, we have demonstrated the ability of macro-scale biohybrid components to intelligently interact with their environments by self-shaping. We encoded climate-responsive movements into a hybrid system of natural and synthetic materials, using 3D-printed functional patterns and integrated wood bilayer actuators. The physical material and fabrication logic, rather than any electronics or digital control, dictate the self-shaping behaviors. We formulated a method for designing and 3D-printing material properties, such as elasticity and compliance of varying magnitudes and anisotropies, using functional patterns. We also detailed the tectonic interface between natural and synthetic parts of the hybrid system. Finally, we established a strategy for producing macro-scale biohybrid components through a sequential process of multi-material additive fabrication.
3.1 Discussion
While our results indicate the potential of leveraging natural wood actuators with 3D-printing, our current approach still has a number of limitations and open questions. The wood bilayer actuators, when embedded in the biohybrid components, must overcome the inherent resistance caused by its 3D-printed armature. This can generally be mitigated by 3D-printing with thermoplastic elastomers. Starting with a lower baseline elastic modulus allows the range of tunable material properties to be expanded, as stiffness is more easily increased through added height and density in the functional patterns. Moreover, thicker wood bilayers could be employed for their higher actuation forces. For further upscaling, it will be important to consider the resultant increase in the structure’s self-weight, especially during the self-erecting process. This might be alleviated by the strategic distribution of wood bilayer actuators in the system, coupled with 3D-printed functional patterns that optimize the ratio between strength to weight.
3.2 Outlook and Future Work
Biohybrid parts which move in response to the changing weather without electrical power can potentially serve as a solution to energy-efficient indoor climate control [10]. Although we have shown self-shaping at a range of spatial scales, the adoption of biohybrid components in buildings will require further exploration of the additional functionalities which are enabled by this material programming and additive fabrication approach. For the application of responsive facades that can manage the indoor climate, it will be necessary to overcome the poroelastic time scale. In the case of irreversible self-shaping such as in deployable structures and shells, safety mechanisms for locking the desired shape change will need to be investigated. Beyond the use of wood, other combinations of natural material actuators and synthetic material programming could be particularly interesting for large-scale self-shaping systems.
References
Boley, J.W., et al.: Shape-shifting structured lattices via multimaterial 4D printing. Proc. Natl. Acad. Sci. 116(42), 20856–20862 (2019). https://doi.org/10.1073/pnas.1908806116
Dow, T.A., Scattergood, R.O.: Mesoscale and microscale manufacturing processes: challenges for materials, fabrication and metrology. In: Proceedings of the ASPE Winter Topical Meeting, vol. 28, pp. 14–19 (2003)
Frey, M., Widner, D., Segmehl, J.S., Casdorff, K., Keplinger, T., Burgert, I.: Delignified and densified cellulose bulk materials with excellent tensile properties for sustainable engineering. ACS Appl. Mater. Interfaces 10(5), 5030–5037 (2018). https://doi.org/10.1021/acsami.7b18646
Grönquist, P., Panchadcharam, P., Wood, D., Menges, A., Rüggeberg, M., Wittel, F.K.: Computational analysis of hygromorphic self-shaping wood gridshell structures. Royal Soc. Open Sci. 7(7), 192210 (2020). https://doi.org/10.1098/rsos.192210
Grönquist, P., et al.: Investigations on densified beech wood for application as a swelling dowel in timber joints. Holzforschung 73(6), 559–568 (2019). https://doi.org/10.1515/hf-2018-0106
Grönquist, P., Wood, D., Hassani, M.M., Wittel, F.K., Menges, A., Rüggeberg, M.: Analysis of hygroscopic self-shaping wood at large scale for curved mass timber structures. Sci. Adv. 5(9), eaax1311 (2019). https://doi.org/10.1126/sciadv.aax1311
La Magna, R., Knippers, J.: Tailoring the bending behaviour of material patterns for the induction of double curvature. In: De Rycke, K., et al. (eds.) Humanizing Digital Reality, pp. 441–452. Springer, Singapore (2018). https://doi.org/10.1007/978-981-10-6611-5_38
Lewis, J.A., Bell, M.A., Busbee, T.A., Minardi, J.E.: Printed three-dimensional (3D) functional part and method of making (2016)
Panetta, J., Zhou, Q., Malomo, L., Pietroni, N., Cignoni, P., Zorin, D.: Elastic textures for additive fabrication. ACM Trans. Graph. 34(4), 1–12 (2015). https://doi.org/10.1145/2766937
Poppinga, S., et al.: Toward a new generation of smart biomimetic actuators for architecture. Adv. Mater. 30(19), e1703653 (2018). https://doi.org/10.1002/adma.201703653
Reichert, S., Menges, A., Correa, D.: Meteorosensitive architecture: biomimetic building skins based on materially embedded and hygroscopically enabled responsiveness. Comput.-Aided Des. 60, 50–69 (2015). https://doi.org/10.1016/j.cad.2014.02.010
Rüggeberg, M., Burgert, I.: Bio-inspired wooden actuators for large scale applications. PloS One 10(3), e0120718 (2015). https://doi.org/10.1371/journal.pone.0120718
Soler, V., Retsin, G., Jimenez Garcia, M.: A generalized approach to non-layered fused filament fabrication. In: Nagakura, T., Tibbits, S., Ibañez, M., Mueller, C. (eds.) DISCIPLINES & DISRUPTION, pp. 562–571. Association for Computer Aided Design in Architecture (ACADIA), Cambridge, MA (2017)
Wood, D., Vailati, C., Menges, A., Rüggeberg, M.: Hygroscopically actuated wood elements for weather responsive and self-forming building parts - facilitating upscaling and complex shape changes. Constr. Build. Mater. 165, 782–791 (2018). https://doi.org/10.1016/j.conbuildmat.2017.12.134
Wood, D.M., Correa, D., Krieg, O.D., Menges, A.: Material computation–4D timber construction: towards building-scale hygroscopic actuated, self-constructing timber surfaces. Int. J. Archit. Comput. 14(1), 49–62 (2016). https://doi.org/10.1177/1478077115625522
Yuan, P.F., Chen, Z., Zhang, L.: Application of discrete system design in robotic 3-D printed shell structure. In: Proceedings of IASS Annual Symposia, vol. 2018, pp. 1–8 (2018)
Acknowledgements
The research was partially supported by the Sino-German Centre for Research Promotion – GZ 1162 – and the German Research Foundation DFG under Germany’s Excellence Strategy – EXC 2120/1 – 390831618. Additionally, this work was tested in a workshop setting at the Digital Futures 2018 conference in Shanghai. The authors especially thank Long Nguyen and Ahmad Razavi for their help in developing the system; we would like to also thank the students who participated in our workshop: Chen Cai, Yunyi Chen, Philipp Farana, Osama Hashem, Mu He, Kecheng Huang, Xiaobai Ji, Zhuoqun Jiang, Zeynab Kaseb, Tomas Vivanco Larrain, Siyu Li, Yige Liu, Jiaxin Nie, Yuchi Shen, Zexin Sun, Xuan Tang, Liu Yang, Zhefan Yu, Fei Yue, Tong Zhang, Qingyu Zhu.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Cheng, T., Wood, D., Wang, X., Yuan, P.F., Menges, A. (2020). Programming Material Intelligence: An Additive Fabrication Strategy for Self-shaping Biohybrid Components. In: Vouloutsi, V., Mura, A., Tauber, F., Speck, T., Prescott, T.J., Verschure, P.F.M.J. (eds) Biomimetic and Biohybrid Systems. Living Machines 2020. Lecture Notes in Computer Science(), vol 12413. Springer, Cham. https://doi.org/10.1007/978-3-030-64313-3_5
Download citation
DOI: https://doi.org/10.1007/978-3-030-64313-3_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-64312-6
Online ISBN: 978-3-030-64313-3
eBook Packages: Computer ScienceComputer Science (R0)