
Abstract
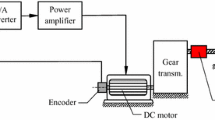
Servo mechanical press is a mechatronic system, consisting of a reducer, actuator and a servomotor with a controller. Control of the servo mechanical press is carried out with a help of the controller depending of technological process of pressing. Reverse kinematic analysis of the actuator of the servo mechanical press is presented in the work to determine the law of motion of a crank, reproducing the specified law of motion of the servo mechanical press slide. Obtained law of motion of the actuator’s crank of the servo mechanical press is necessary to choose the servomotor. Considering that servo mechanical press works by complex programmable motion large dynamic loads occur in its nodal points and links. The work proposes to simulate the dynamics of the servo mechanical press on the software complex SimulationX. Dynamic model of the servo mechanical press is composed with account for elastic-dissipative characteristics of the links and the parameters of the servomotor, for different laws of motion of the slide. A dynamic model of a 50-ton servo mechanical press is developed using the SimulationX software package. Calculation was carried out using real data of the existing 50 ton servo mechanical press. As a result of the calculation of the dynamic model of the servo mechanical press, the following data were obtained: motion, velocity, acceleration of the slide, torque effect on the crank, angular rate, torque effect, power of the servomotor.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Halicioglu, R., Dulger, L.C., Bozdana, A.T.: Mechanisms, classifications, and applications of servo presses a review with comparisons. Proc. Inst. Mech. Eng. Part B. J. Eng. Manuf. 230(7), 1177–1194 (2016)
Groseclose, A.: New applications for servo-driven presses: part I: stamping of automotive components. Stamping J., 14–15 (2009)
Osborn, A., Paul, S.: Servo-press technology: drive design and performance. MetalForming 42, 18–23 (2008)
Osakada, K., Mori, K., Altan, T., Groche, P.: Mechanical servopress technology for metal forming. CIRP Ann. Manuf. Technol. 60(2), 651–672 (2011)
Erkaya, S., Su, G., Uzmay, I.: Dynamic analysis of a slider-crank mechanism with eccentric connector and planetary gears. Mech. Mach. Theor. 42(4), 393–408 (2007)
Fung, R.F., Chiang, C.L., Chen, S.J.: Dynamic modelling of an intermittent slider-crank mechanism. Appl. Math. Model. 33(5), 2411–2420 (2009)
Halicioglu, R., Dulger, L.C., Bozdana, A.T.: Modeling, design, and implementation of a servo press for metal-forming application. Int. J. Adv. Manuf. Technol. 91(5), 2689–2700 (2017). https://doi.org/10.1007/s00170-016-9947-8
Anis, A.: Simulation of slider crank mechanism using ADAMS software. Int. J. Eng. Technol. 12(4), 108–112 (2012)
ESI ITI GmbH. http://www.simulationx.com/
Halicioglu, R.: Design, synthesis and control of a mechanical servo press: an industrial application. Ph.D. Thesis, Gaziantep University (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 CISM International Centre for Mechanical Sciences
About this paper

Cite this paper
Jomartov, A. et al. (2021). Dynamic Model of Servo Mechanical Press. In: Venture, G., Solis, J., Takeda, Y., Konno, A. (eds) ROMANSY 23 - Robot Design, Dynamics and Control. ROMANSY 2020. CISM International Centre for Mechanical Sciences, vol 601. Springer, Cham. https://doi.org/10.1007/978-3-030-58380-4_21
Download citation
DOI: https://doi.org/10.1007/978-3-030-58380-4_21
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-58379-8
Online ISBN: 978-3-030-58380-4
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)