
Abstract
Modelling may be considered as one of the most important aspects of Structural Health Monitoring (SHM) providing reliable tools capable of acquisition, validation and analysis of technical data. Numerous literature examples acknowledge that different physical parameters and their changes play an important role in damage detection based on modal analysis, wave propagation, impedance changes, ultrasonic inspection and many others. Their appropriate and precise computer modelling has become a key factor in the assessment of potential capabilities of novel SHM systems. Therefore it is extremely important to operate with validated numerical tools. Numerical models of typical engineering structures are based on certain differential equations defining problems under consideration. Various numerical techniques have been used and developed to solve such problems. The key aspect of the presented paper is to provide and present systematised information about various aspects of two most often used numerical modelling techniques used for SHM purposes, their abilities, limits and other properties, that as a consequence may even lead to inadequate numerical solutions, especially in the case of damage detection techniques based on wave propagation phenomena.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
46.1 Introduction
Modelling may be considered as one of the most important aspects of structural condition monitoring providing reliable tools capable of acquisition, validation and analysis of technical data [1]. Various techniques have become the subjects of extensive scientific interest and analysis [2]. Numerous literature examples acknowledge that different physical parameters and their changes [3] play an important role in damage detection based on modal analysis [4, 5], wave propagation [6, 7], impedance changes [8, 9], ultrasonic inspection [10, 11] and many others [12, 13]. Their appropriate and precise computer modelling has become a key factor in the assessment of potential capabilities of novel SHM systems. As one of the most important aspects of damage detection procedures is the capability of localising a damage in its very early stage of growth therefore one can observe growing interest in global detection methods based on high frequencies analysis. In other words the methods based on the analysis of the influence of the propagation of surface wave signals on a structure (Figs. 46.1 and 46.2). For this reason it is extremely important to operate with validated numerical tools. The greatest challenge of the SHM system is to know what physical parameters observe and how to identify ‘changes’ of them.

The geometry of the analysed L-shape Al panel

Propagation of guided elastic waves in an isotropic L-shaped panel
Numerical models of typical engineering structures are based on certain differential equations defining problems under consideration. Various numerical techniques have been used and developed to solve such problems. Usually, the Finite Element Method (FEM) has been successfully applied for this purpose, but special cases, especially when higher operational frequencies are considered, spectral methods have been employed and reported as more efficient. Several typically used numerical methods to solve partial differential equations have been gathered in Table 46.1.
A key aspect in the process of numerical modelling of structures is the proper proportion between the time of calculation and the type of complication of the numerical method chosen for solution of the analysed problem. For several decades constantly grows the number of application of spectral methods for solution of structural health monitoring problems. According to an overall definition known from the literature the spectral methods involve representing the solution to a problem as a truncated series of known functions of the independent variables [15]. The choice of an appropriate spectral method should be defined by the two main considerations: the accuracy and the efficiency. In order to be useful a spectral method should be designed to give results of greater accuracy than can be obtained by more conventional difference methods using similar spatial resolution or degrees of freedom. The choice of appropriate spectral representation depends on the kind of boundary conditions involved in the problem. The spectral element method should also be as efficient as difference methods with comparable numbers of degrees of freedom. For similar work, spectral methods should produce more accurate results than conventional methods [15].
Despite the fact that there is a wide variety of computational techniques employed to solve different types of problems arising when dealing with SHM applications [17], it is very difficult to provide a general statement that can answer the question concerning the most powerful numerical method. In this context the terms suitable and efficient are only used according to the problem under consideration. For modelling of wave propagation phenomena the most popular have been recently spectral methods. Two different approaches may be distinguished [16]. The first one, popularised by Doyle [18], is named Frequency Domain Spectral Element Method (FDSEM or in shorter version FDM only). This method is a widely used semi-analytical technique for simulation of guided wave propagation in 1-D and 2-D wave-guides [19]. The governing partial differential wave equations are transformed to frequency domain through FFT (Fast Fourier Transformation) of the displacement variables. Such an operation converts the partial differential equations (PDEs) to a set of ordinary differential equations (ODEs) for each discretised frequency. The solutions obtained from such a mathematical operation are utilised as shape functions to formulate the elemental dynamic stiffness matrix. This procedure enables the relation of the Fourier transformed nodal forces to the corresponding transformed nodal displacements.
As the formalism is similar to Finite Element Method (FEM), FDM can be used to model structures with higher complexities, like by the use of FEM. FDM, however, leads to substantial computational efficiency as compared to FE. The method has been shown to be efficient in modelling anisotropic and inhomogeneous structures or damages [20]. The main limitation of FDM is the difficulty of modelling finite length structures due to certain numerical properties of finite domain Fourier transform.
The second approach is named Time Domain Spectral Finite Element Method (TDSFEM or TDM) along with its extensive use in computational solid and fluid mechanics, has been found to be efficient in simulating guided wave propagation. This scheme alleviates the disadvantage of FE in terms of large computational time resulting from fine spatial and temporal discretization. The primary difference between TDM and FEM is the use of higher order polynomials as shape functions in the former method. Additionally, in TDM, the integration points are usually collocated with the nodes, therefore such a formulation of the consistent diagonal mass matrix helps in faster convergence [21]. TDM has been successfully implemented for simulation of wave propagation in 1D, 2-D and 3-D waveguides [22,23,24] which includes modelling of PZT induced wave propagation [24] wave interaction with damages [25]. The most significant differences between two aforementioned spectral methods have been addressed in the Table 46.2.
The choice of the method of solution is equally important as the choice of the appropriate stress-strain relation based on the assumed displacement field, which will allow for the correct description of the dedicated mechanical problem. The next figure (Fig. 46.3) illustrate the propagation of Lamb wave in an isotropic rod element with a single rod theory and a Timoshenko theory. As it can be noticed from the figure—the wave propagating in a simple straight rod element after certain time may give a response of a complicated character. Therefore the user needs to pay a careful attention while considering the choice of numerical method applied as well as the background theory to define the problem.

Propagation of elastic waves in an isotropic rod
46.2 Some Selected Aspects of Wave Propagation Modelling
This paragraph will be focused on some numerical aspects resulting from the differences in the selected numerical methods, in particular FEM, FDM and SEM.
In order to illustrate the differences between different modelling methods, an exemplary graph has been prepared (Fig. 46.4). In this figure several exemplary shape functions have been gathered. The waveforms on the left hand side have been the shape functions for a FEM rod element with five nodes and with 10 nodes respectively. The figure clearly shows the Rungge effect—an increase in the amplitude of the approximation polynomial at the points of discontinuity of the shape function derivative—a typical effect in FEM application. This problem has been already widely reported in the literature. The two figures from the middle part of the Fig. 46.4 show two exemplary shape functions that have been calculated for a rod element formulated by the use of TDSFEM with 10 and 20 nodes respectively. It is also possible to notice the non-uniform location of nodes in the element as well as the curve of the shape functions suitable for modelling the wave propagation phenomenon. The graphs visible on the right hand side of the Fig. 46.4 illustrate the form of the shape functions used in the FDSFEM method. Two wave numbers have been randomly selected, for which the shape function waveform has been determined. As it may be clearly concluded from the figure this method without difficulties also allows to properly model the phenomenon of propagating mechanical wave in case of simple rod element.

Exemplary shape functions for different numerical methods
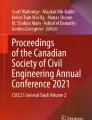
Multi-mode nature of wave propagation phenomena is the key aspect while planning to study the effects of damage on propagating mechanical wave and a special attention should be payed to it. This issue is crucial for the selection of the carrier frequency of the excitation signal. The so-called dispersion curves [26], which result from the solution of the solution of the equations of motion assumed as an infinite sums of harmonics for each displacement component for an element of interest, are helpful here. The mentioned dispersion curves describe the dependence of wave propagation velocity on the product of the frequency of forcing and the thickness of the plate. Knowing these dependencies is important, for example, when choosing the time of analysis of the problem. An exemplary set of dispersion curves obtained for the six-mode shell theory has been presented in Fig. 46.5. As it can be seen from Fig. 46.5 at least ten dispersion curves of the modes propagating in the element of interest may be distinguished. These are six Lamb wave (three symmetric modes S0, S1and S2, three anti-symmetric modes A0, A1 and A2) as well as three modes associated with horizontal shear waves SH0, SH1 and SH2 propagating in the element of interest. It should be emphasised that the presented dispersion curves have been also calculated for an analytical formulation of the problem. As it may be noticed from the Fig. 46.5 in the frequency range of interest there is a satisfactory degree of convergence between the analytical and spectral formulation.

Dispersion curves for the six-mode shell theory applied
Errors resulting from numerical model properties. In the case of mechanical wave propagation analysis, the accuracy of the results may be determined by the choice of the numerical method used to solve the analysed problem. A simple comparative example of propagation of elastic waves in an isotropic rod—elementary single mode theory (no model dispersion, 161 d.o.f.) has been given to show possible errors. The material properties have been given in the Fig. 46.6. In the following Fig. 46.7 the propagation of elastic waves in the aforementioned isotropic rod has been shown.

Isotropic rod—elementary single-mode theory (no model dispersion, 161 d.o.f.)

Propagation of elastic waves in an isotropic rod
The first result from Fig. 46.7 presented concerns the application of TDM. In this case, as shape function the Chebyshew polynomial of 6th order has been applied. As it can be seen from the diagram the time of occurrence in Fig. 46.7, even in the simplest case, the signal at the rod end is recorded without any dispersion and appears exactly in the appropriate time window (grey background behind the signal on every signal).
In the case of FEM (Finite Element Method), two options have been explored: a full inertia matrix and a diagonal one. As it can be noticed the careless use of FEM (the simplest two-node element) leads to significant errors resulting from a numerical dispersion of the signal. In the recorded response the wave propagates slower (in case of full inertia matrix) or faster (in case of diagonal inertia matrix). Naturally, these errors could be avoided by improving the mesh density or by using more advanced finite elements, or by using higher-order approximation functions. An interested reader is encouraged to follow the literature resources clarifying this problem in more details [23, 27].
The third of the results discussed concerns the FDM (Frequency Domain Method) model. In this case, errors resulting from the specificity of the numerical model make it impossible to accurately reproduce even the excitation signal itself, and consequently the correct analysis of wave propagation in the element.
46.3 Conclusions
Several systematised conclusion about various aspects of numerical modelling techniques used for SHM purposes may be identified as:
-
the spectral methods utilised for modelling the structural wave propagation phenomena allow for a reduction in the calculation time compared to the analysis of the same complex geometries modelled with classical finite element methods,
-
the FDM modelling algorithm requires a simple and reverse Fourier transforms, which can lead to significant numerical errors in two-dimensional geometry,
-
the versatile nature of the TDM has been confirmed by the rapidly growing number of publications on the various examples of its use. This fact originates from the mathematical background of the method, i.e. non-uniform nodes distribution in the element modelled.
References
Hall, S.: The effective management and use of structural health data. In: Proceedings of the 2nd International Workshop on Structural Health Monitoring, pp. 265–275 (1999)
Inman, D., Farrar, C., Lopes Jr., V., Steffen Jr., V. (eds.): Damage Prognosis for Aerospace, Civil and Mechanical Systems. Wiley, Hoboken (2005)
Kessler, S., Spearing, S., Soutis, C.: Damage detection in composite materials using lamb wave methods. Smart Mater. Struct. 11, 269–278 (2002)
Wang, J., Qiao, P.: Improved damage detection for beam-type structures using an uniform load surface. Struct. Health Monitor. 6, 99–110 (2007)
Sinou, J.: A review of damage detection and health monitoring of mechanical systems from changes in the measurement of linear and non-linear vibrations. In: Mechanical Vibrations: Measurement, Effects and Control, pp. 643–702. Nova Science Publishers (2009)
Martinez, M., Pant, S., Yanishevsky, M., Backman, D.: Residual stress effects of a fatigue crack on guided lamb waves. Smart Mater. Struct. 26, 1–16 (2017)
Kudela, P., Radzienski, M., Ostachowicz, W., Yang, Z.: Structural health monitoring system based on a concept of lamb wave focusing by the piezoelectric array. Mechan. Syst. Sig. Process. 108, 21–32 (2018)
Giurgiutiu, V., Zagrai, A.: Damage detection in thin plates and aerospace structures with the electro-mechanical impedance method. Struct. Health Monitor. 4(2), 99–118 (2005)
Dhakal, D.R., Neupane, K.E., Thapa, Ch., Ramanjaneyulu, G.V.: Different techniques of structural health monitoring. Res. Dev. (IJCSEIERD) 3(2), 55–66 (2013)
Rizzo, P., di Scalea, F.L.: Feature extraction for defect detection in strands by guided ultrasonic waves. Struct. Health Monitor. 5(3), 297–308 (2006)
Broda, D., Staszewski, W., Martowicz, A., Uhl, T., Silberschmidt, V.: Modelling of non-linear crack-wave interactions for damage detection based on ultrasound—a review. J. Sound Vibr. 333, 1097–1118 (2014)
Nichols, J., Trickey, S., Seaver, M., Moniz, L.: Use of fibre-optic strain sensors and holder exponents for detecting and localizing damage in an experimental plate structure. J. Intell. Mater. Syst. Struct. 18, 51–67 (2007)
Boller, C., Chang, F., Fujino, Y. (eds.): Encyclopedia of Structural Health Monitoring. Wiley, Hoboken (2009)
Wikipedia: Solution methods of numerical partial differential equations. Wikipedia from Internet Resources, vol. 1, pp. 1–2 (2018)
Gottlieb, D., Orszag, S.: Numerical Analysis of Spectral Methods: Theory and Applications. SIAM-CBMS, Philadelphia (1977)
Palacz, M.: Spectral methods for modelling of wave propagation in structures in terms of damage detection—a review. Appl. Sci. 8(7), 1–25 (2018)
Willberg, C., Duczek, S., Vivar-Perez, J., Ahmad, Z.: Simulation methods for guided wave-based structural health monitoring: a review. Appl. Mechan. Rev. 67, 1–30 (2015)
Doyle, J.: Wave Propagation in Structures. Spectral Analysis Using Fast Discrete Fourier Transforms, 2nd edn. Springer, Heidelberg (1997)
Mitra, M., Gopalakrishnan, S.: Guided wave based structural health monitoring: a review. Smart Mater. Struct. 25, 1–28 (2016)
Gopalakrishnan, S., Chakraborty, A., Mahapatra, D.R.: Spectral Finite Element Method. Springer, Heidelberg (2008)
Rekatsinas, C.S., Nastos, C.V., Theodosiou, T.C., Saravanos, D.A.: A time domain high-order spectral finite element for the simulation of symmetric and antisymmetric guided waves in laminated composite strips. Wave Motion 53, 1–9 (2015)
Kudela, P., Zak, A., Krawczuk, M., Ostachovicz, W.: Modelling of wave propagation in composite plates using the time domain spectral element method. J. Sound Vibr. 302, 728–745 (2007)
Zak, A., Krawczuk, M.: A higher order transversely deformable shell-type spectral finite element for dynamic analysis of isotropic structures. Finite Elem. Anal. Des. 142, 17–29 (2018)
Kim, Y., Ha, S., Chang, F.-K.: Time-domain spectral element method for build in piezoelectric-actuator-induced lamb wave propagation analysis. AIAA J. 46, 591–600 (2008)
Peng, H., Meng, G., Li, F.: Modelling of wave propagation in plate structures using three-dimensional spectral element method for damage detection. J. Sound Vibr. 320, 942–954 (2009)
Zak, A., Radzienski, M., Krawczuk, M., Ostachovicz, W.: Damage detection˙ strategies based on propagation of guided elastic waves. Smart Mater. Struct. 21, 1–18 (2012)
Zak, A., Krawczuk, M.: Assessment of rod behaviour theories used in spectral˙ finite element modelling. J. Sound Vibr. 329, 2099–2113 (2010)
Acknowledgements
The authors would like to gratefully acknowledge the support of the Academic Computer Centre in Gdansk, the provider of the software used for the research done by the authors and described in this paper.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Palacz, M., Krawczuk, M., Żak, A. (2020). Spectral Element Methods for Damage Detection and Condition Monitoring. In: Ball, A., Gelman, L., Rao, B. (eds) Advances in Asset Management and Condition Monitoring. Smart Innovation, Systems and Technologies, vol 166. Springer, Cham. https://doi.org/10.1007/978-3-030-57745-2_46
Download citation
DOI: https://doi.org/10.1007/978-3-030-57745-2_46
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-57744-5
Online ISBN: 978-3-030-57745-2
eBook Packages: EngineeringEngineering (R0)