
Abstract
In the first two parts of the calculation of the vibration resistance of a high-speed chemical reactor shaft, undergoing torsional vibrations, a structured block diagram of a dynamic model of a multi-mass system apparatus and elastic-inertial parameters of a dynamic model are presented, respectively. Also in the second part, a simplification of the dynamic model parameters and their reduction to the same shaft is given, due to the masses that do not have a significant effect on the transmission load. The third part of the vibration resistance calculation is devoted to the calculation, graphical representation, and analysis of the forms of torsional vibrations of a multi-mass system. The analysis of frequencies and modes of natural vibrations, which have a significant impact on the overall dynamic vibration load on a mechanical chemical reactor drive transmission, has been conducted. The sources of external uneven load and their frequency have been found as well as the resonance, which can cause dangerous stresses in the shaft line of the calculated drive system of a chemical reactor.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Chemical reactor
- Mechanical mixing
- Vibration resistance
- High-speed shaft
- Bending vibrations
- Torsional vibrations
- Dynamic model
- Multi-mass system
1 Defining Dissipative Model Parameters
Considerable damage in modern machines and apparatus for chemical production occurs due to high stresses arising in their components during vibrations. The vibrations are caused by periodic or suddenly applied forces acting both independently and in combination with thermal, static, and other factors [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18].
In practice, the dissipative parameters of model elements are determined experimentally based on the values of damping decrements of the vibrations of individual masses. At the design stage of the chemical production apparatus it is often difficult, and sometimes impossible to obtain experimental data of this type. Therefore, many engineers use data obtained previously by other researchers on similar plants. For power trains and drive systems, the experimental values of the logarithmic decrements of vibrations are given in Tables 1 and 2.
The damping coefficient values k of the masses of the given model calculated by Eq. 1 are shown in Table 3.
where I is the moment of inertia, ω is the partial frequency of mass vibrations, for which k is found.
The damping coefficient of the mixers depends on the physical properties of the mixed media (reaction products).
In Table 3, the partial frequencies ωp of each inertial mass of the model were calculated by the equation:
where Ii is the moment of inertia of the i-th mass; CΣ is the total rigidity of the sections attached to the mass Ii.
2 Construction of Differential Equations of the System
Based on the D’Alembert principle, using the Lagrange equations of the second kind, the motion of a torsionally vibrating nine-mass system under forced vibrations is described by the following system of differential equations:
where I1, I2, … I9 are the inertia moments of the masses; C1,2, C2,3, … C8,9 are the rigidity of their linkages; φ1, φ2, φ9 are the rotation angles of the masses; \(\ddot{\phi }_{1} ,\ddot{\phi }_{2} , \ldots \ddot{\phi }_{9}\) are mass accelerations in oscillatory motion; Mmot is the torque of the electric motor; Mr1, Mr2 are the resistance moments of the first and second mixers.
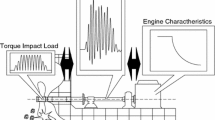
To solve this system of equations we use the Matlab software package for scientific and engineering calculations [1, 19,20,21]. The description of blocks and algorithms for constructing dynamic models in the Simulink visual modeling environment are discussed in detail in the reference and specialized literature [19, 22]. Based on the system of differential Eq. (3), the dynamic model of the mixer drive in the Simulink visual simulation system is shown in Fig. 1.

Implementation of a system of differential equations in a Simulink environment
The above calculation algorithm linearizes the Simulink model, creates a transfer function from the form of the state-space model, searches for the roots of the characteristic equation in the complex plane, constructs the Bode diagrams (amplitude-frequency response, phase response, Fig. 2a) and Nyquist diagrams (amplitude-phase frequency response, Fig. 2b) [1]. The calculation algorithm provides checking the sign of the imaginary part of the obtained roots of the characteristic equation, based on which the own frequencies are sampled (the imaginary part of the root must be greater than 0).

a The resulting amplitude-frequency response and phase-frequency response; b amplitude-phase frequency response of the system
Based on the analysis of the Bode (see Fig. 2a) and Nyquist diagrams (see Fig. 2b), the vibration forms for the first four frequencies of the system are found (see Figs. 3 and 4).

a Single-node waveform for a frequency of 52.71 Hz; b two-node waveform for a frequency of 106.38 Hz

a Three-node waveform for a frequency of 152.45 Hz; b four-node waveform for a frequency of 496.18 Hz
The obtained values of the natural frequencies of the system are shown in Table 4.
3 Conclusion
As we see in the system under consideration, the number of natural frequencies and modes of vibration is one less than the number of masses, that is, the number of forms is 8. Waveforms are referred to by the number of nodes: with one node is a single-node form, with two nodes is a two-node form, etc. The zero form has no nodes and corresponds to the free rotation of the shaft. Each form has its own frequency of natural vibrations. The single-node form corresponds to the natural frequency of the first degree or first order, the two-node form corresponds to the second degree or second order, etc.
Based on the analysis of the Bode and Nyquist diagrams, the vibration forms for the first four frequencies of the system are found (see Figs. 3 and 4). The frequencies from 5th to 8th have high values lying in the range of sound waves. In practice, vibrations with such frequencies have small amplitudes and do not significantly affect the overall dynamic vibrational load of the transmission. Therefore, further analysis is impractical.
Of the total number of frequencies and modes of natural vibrations, of practical interest are only those frequencies whose resonance can cause dangerous stresses in the shaft line of the calculated system. The main source of external uneven load is the electric motor and mixers.
The analysis is given in Figs. 3 and 4 forms showed that the vibration nodes with a significant difference in the amplitudes of the neighboring masses are observed in sections 4–5, 7–8 and 9–10. Moreover, section 4–5 is heavily loaded at all frequencies under consideration.
All found natural frequencies are much higher than the rotational speeds of the motor shaft, which eliminates the occurrence of resonant phenomena in steady-state operating modes. However, transient resonances are possible, as well as resonances with frequencies caused by uneven re-gearing of gear teeth in gears, gear couplings, cardan gears, etc. It is possible to generate high-frequency perturbations caused by the uneven distribution of mixed reaction products on the blades of the mixers, which can also cause resonance phenomena in the drive.
The analysis of the modes of vibration allows one tuning the natural frequencies of the system from the frequencies of external disturbing influences, identify hazardous areas with high dynamic load, and develop a set of measures to reduce this load in order to ensure the reliability and durability of the drive units and assemblies of a chemical reactor.
References
Merentsov NA, Sokolov-Dobrev NS, Potapov PV (2018) Nestacionarnoe vrashchenie valov himicheskih reaktorov (Unsteady rotation of the shafts of chemical reactors). VolgSTU, Volgograd
Khvostov AA, Degtyarev NA, Panov SY, Ryazanov AN (2016) Simulation model of propagation of vibrations in a system of connected bodies for the solution of problems of vibration diagnostics. Chem Petrol Eng 52:429–437. https://doi.org/10.1007/s10556-016-0211-8
Malyhin VV, Yatsun EI, Seleznev YN, Novikov SG (2017) Development of designs of damping cutting tools. Chem Petrol Eng 52:763–768. https://doi.org/10.1007/s10556-017-0267-0
Gritsenko VG, Lazarenko AD, Lyubchenko KY, Martsinkovskii VS, Tarel’nik VB (2020) Increasing the life of the slider bearings of the turbines of high-speed compressors. Chem Petrol Eng 1–8. https://doi.org/10.1007/s10556-020-00699-7
Timonin AS, Moiseev VB, Tarantseva KR (2015) Osnovy konstruirovaniya i rascheta himiko-tekhnologicheskogo i prirodoohrannogo oborudovaniya (Fundamentals of the design and calculation of chemical-technological and environmental equipment). Noosphere, Kaluga
Ostrikov AN (2009) Raschet i konstruirovanie mashin i apparatov pishchevyh proizvodstv (Calculation and design of machines and apparatus for food production). Publishing house RAPP, St. Petersburg
Maslov GS (1890) Raschety kolebanij valov: spravochnik (Calculation of oscillations of the shafts: a guide). Mechanical Engineering, Moscow
Timonin AS, Bozhko GV, Borschev VY, Gusev YuI (2019) Oborudovanie neftegazopererabotki, himicheskih i neftekhimicheskih proizvodstv (Equipment for oil and gas processing, chemical and petrochemical industries). Infra-Engineering, Moscow
Timonin AS, Baldin BG, Borschev VY, Gusev YI (2014) Mashiny i apparaty himicheskih proizvodstv (Machines and apparatus for chemical production). Noosphere, Kaluga
Dmitriev AV, Dmitrieva OS, Sabanaev IA (2017) Rigidity of the bearing elements of the contact structures of a mass-transfer apparatus. J Eng Phys Thermophys 90(3):715–720. https://doi.org/10.1007/s10891-017-1619-5
Efimenko NS, Sabanaev IA, Madyshev IN (2019) Simulation of repair and technical maintenance processes for power-generating equipment components at chemical factories. In: MATEC Web of Conference, vol 298, p 00026. https://doi.org/10.1051/matecconf/201929800026
Mule GM, Kulkarni AA (2016) Mixing of medium viscosity liquids in a stirred tank with fractal impeller. Theor Found Chem Eng 50:914–921. https://doi.org/10.1134/S0040579516060105
Domanskii I, Mil’chenko AI, Sargaeva YV, Kubyshkin SA, Vorob’ev-Desyatovskii NV (2017) Experience in the design and reliable operation of ore-pulp precessional mixers for large-volume process tanks. Theor Found Chem Eng 51:1030–1042. https://doi.org/10.1134/S0040579517060021
Prikhod’ko AA, Smelyagin AI (2018) Investigation of power consumption in a mixing device with swinging movement of the actuating element. Chem Petrol Eng 54:150–155. https://doi.org/10.1007/s10556-018-0454-7
Ivanets VN, Ivanets GE, Potapov AN (2015) Intensification of gas-liquid processes in multi-purpose rotary-pulsating units. Chem Petrol Eng 51:221–225. https://doi.org/10.1007/s10556-015-0027-y
Abiev RS, Vdovets MZ, Romashchenkova ND, Maslikov AV (2019) Intensification of mass transfer processes with the chemical reaction in multi-phase systems using the resonance pulsating mixing. Russ J Appl Chem 92:1399–1409. https://doi.org/10.1134/S1070427219100100
Sergeev YS, D’yakonov AA, Sergeev SV, Gordeev EN (2019) Increasing the homogeneity of liquid aerated concrete mixtures from dispersed brittle materials by their vibromixing in the manufacture of building products. Theor Found Chem Eng 53:760–768. https://doi.org/10.1134/S004057951905035X
Mil’chenko AI, Domanskii IV, Vorob’ev-Desyatovskii NV (2005) Design of large-volume agitators for polydisperse suspensions. Russ J Appl Chem 78(12):1970–1976. https://doi.org/10.1007/s11167-006-0013-4
Shekhovtsov VV, Lyashenko MV, Sokolov-Dobrev NS, Dolgov KO (2013) Modeling dynamic processes in nodes of vehicles using visual modeling package Matlab/Simulink. VolgSTU, Volgograd
Anufriev IE (2002) Self-instruction manual Matlab 5.3/6.x. SPb. BHV, St. Petersburg
Dyakonov VP (2001) Matlab 6: training course. SPb. BHV, St. Petersburg
Dyakonov VP (2008) Simulink 5/6/7: Self-instruction manual. DMK-Press, Moscow
Acknowledgements
This work was supported by a grant from the President of the Russian Federation MK-1287.2020.8.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Merentsov, N.A., Sokolov-Dobrev, N.S., Persidskiy, A.V. (2021). Calculation of Vibration Resistance of Chemical Reactor High-Speed Shaft Undergoing Torsional Vibrations. Part III. Calculation of Multi-Mass System Vibrations. In: Radionov, A.A., Gasiyarov, V.R. (eds) Proceedings of the 6th International Conference on Industrial Engineering (ICIE 2020). ICIE 2021. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-54814-8_90
Download citation
DOI: https://doi.org/10.1007/978-3-030-54814-8_90
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-54813-1
Online ISBN: 978-3-030-54814-8
eBook Packages: EngineeringEngineering (R0)