
Abstract
This chapter provides a review and update of meltwater and Arctic hydrology, and the impact of glacier and ice sheet mass balance contributions to sea-level rise and ocean circulation. It highlights the recent work and results of large-scale modeling of Greenland climate, glaciers, and ice caps and Greenland Ice Sheet (GrIS) mass balances, and Greenland spatiotemporal freshwater runoff to the surrounding oceans and seas (spatiotemporal runoff simulations based on SnowModel/HydroFlow generated individual drainage catchments for Greenland (n = 3,150), each with an individual flow network). The mass balance for the GrIS was close to equilibrium during the relatively cold 1970s and 1980s and lost mass rapidly as the climate warmed in the 1990s and 2000s. Since 2003, the average annual GrIS mass loss rate was 250–300 km3 yr−1 (equal to 250–300 Gt yr−1). This represents a GrIS loss rate equivalent to a eustatic sea-level rise contribution of 1.1 mm SLE yr−1, compared to a mean estimated global sea-level rise of 3.3 ± 0.4 mm SLE yr−1 from 1993 to 2009, and an average 4.8 mm SLE yr−1 for 2013–2018. Not only has the GrIS lost mass, the land- and marine-terminating outlet glaciers on the periphery of the GrIS have undergone rapid mass and area changes over the recent decades. For example, for the last decade (2000–2010) the average simulated Greenland runoff was 572 ± 53 km3 yr−1 (1.6 ± 0.2 mm SLE yr−1), where the simulations indicated that 69% of the runoff to the surrounding seas originated from the GrIS and 31% came from the land area.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


1 Introduction
The Greenland ice sheet (GrIS) is the largest reservoir of permanent snow and ice in the Arctic (c. 7.4 m sea-level equivalent [SLE]), and it is highly sensitive to ongoing climatic variations and changes (e.g., Hanna et al. 2012; Box and Colgan 2013). Since 1979, satellite observational studies (Mote 2007; Steffen et al. 2008; Tedesco et al. 2011, 2017) have demonstrated that the GrIS melt extent has increased, and that the melt extent is very sensitive to climate changes, with record melt extent in 2012 (Nghiem et al. 2012; Hall et al. 2013). Further, GrIS melt from 1960 to 1972 was simulated by Mernild et al. (2011a), which indicated an average decrease in melt extent of 6%; during 1973–2010, however, average melt extent increased by 13%, with the record melt in 2012 (Hanna et al. 2014). The simulated trends in melt extent were similar to the smoothed trend of the AMO index (Atlantic Multidecadal Oscillation) (Mernild et al. 2011a). The trend in simulated melt extent since 1972 also indicated that the melt period increased by an average of two days yr−1 since 1972, including an extended melting period for the GrIS of about 70–40 days and 30 days in the spring and autumn, respectively.
The exceptional 2012 melt event (July 12) was simulated by SnowModel in Hanna et al. (2014), showing that surface melt covered 90% of the GrIS surface area, which concurs with the 95–98% melt extent from Nghiem et al. (2012) and Hall et al. (2013). This widespread melt event during the satellite era was forced by a blocking high-pressure feature in the mid-troposphere forming a heat dome over Greenland that led to the widespread surface melting (Hanna et al. 2014; Keegan et al. 2014).
The changes in the GrIS melting regime (extent and duration) can produce substantial differences in surface albedo and energy and moisture balances, and may establish a positive feedback mechanism, because wet (i.e., below the dry snow line) snow absorbs up to three times as much incident solar energy as dry, non-melting snow (Steffen 1995). An altered melt regime can, for example, influence the ice sheet’s surface mass balance (SMB), supraglacial lake volumes, snowmelt and ice melt runoff, ice surface velocity, and subglacial sliding processes. One would expect that increasing annual ablation would cause increasing mean annual ice-flow velocity, because of the increasing volume of lubricating surface meltwater reaches the ice–bedrock interface (Joughin et al. 2008). However, for a land-terminating sector of the GrIS, it has been shown that a higher average annual ablation does not necessarily lead to an increase in annual ice velocities (van der Wal et al. 2008).
2 Greenland Ice Sheet
2.1 Greenland Ice Sheet Surface Hydrological Conditions
Mechanisms that link climate, surface hydrology, internal drainage, and ice dynamics are poorly understood, and numerical ice sheet models do not simulate these changes realistically (Nick et al. 2009). From 1960 to 2010, the GrIS surface hydrological conditions, net accumulation (precipitation minus evaporation and sublimation), runoff, and SMB (Fettweis et al. 2008; Hanna et al. 2008; Ettema et al. 2009; Mernild and Liston 2012), were influenced climatically first by decreasing air temperature (1960–mid-1980s) and then by increasing air temperature and net precipitation (mid-1980s–present; Cappelen 2013). The associated increase in surface runoff leads to enhanced SMB loss. Overall, for the GrIS, since the early 1990s to the late 2000s, the amount of runoff to adjacent seas explains about half of the recent annual GrIS mass loss (Rignot and Kanagaratnam 2006; van den Broeke et al. 2009), with iceberg calving generating the other half (Straneo et al. 2013). During 2009–2012, however, freshwater runoff has been estimated to explain around two-thirds of the mass loss of the GrIS (Enderlin et al. 2014). For the GrIS, subtracting the average surface runoff from the net precipitation yielded a surface mass gain, with an average annual GrIS SMB of 156 ± 82 km3 yr−1 (1960–2010), varying from 220 ± 86 km3 yr−1 in 1970–1979 to 86 ± 72 km3 yr−1 in 2000–2010 (Mernild and Liston 2012). Mernild et al. further projected, on average, a GrIS SMB mass loss after 2040—indicating that the GrIS tipping point (defined to be the point where the GrIS continuously face a negative SMB value; Bamber et al. 2009) will occur after 2040, based on the IPCC A1B scenarios; the values were in the same range as projections by Fettweis et al. (2008) and Pattyn et al. (2018).
While, on average, the GrIS surface was gaining mass (1960–2010; with a positive SMB) and closely following mean temperature fluctuations; the overall mass balance for the GrIS was close to equilibrium during the relatively cold 1970s and 1980s and lost mass rapidly as the climate warmed in the 1990s and 2000s, with no indications of deceleration (Rignot et al. 2008; Tedesco et al. 2017). Since 2003, the average annual GrIS mass loss rate was 250–300 km3 yr−1 (equal to 250–300 Gt yr−1); in particular, from April 2010 to April 2011, the ice sheet cumulative loss rate was 430 Gt yr−1: 70% larger than the 2003–2009 average annual loss rate. This represents a GrIS loss rate equivalent to a eustatic sea-level rise contribution of 1.1 mm SLE yr−1 (where 362.5 Gt yr−1 = 1 mm SLE yr−1), compared to a mean estimated global sea-level rise of 3.3 ± 0.4 mm SLE yr−1 from 1993 to 2009 (Church et al. 2013). According to the European Space Agency (ESA), the global mean sea-level rise was 4.8 mm SLE yr−1 for 2013–2018 (http://www.esa.int).
In addition to the sea-level contribution, the increase in GrIS runoff (in net amount and duration), and in iceberg calving (in mass loss) are important for ocean density changes and the thermohaline circulation (e.g., Rahmstorf et al. 2005), specifically to the Atlantic Meridional Overturning Circulation (AMOC) and its impact on the climate system (Bryden et al. 2005). Over the past four decades, through the analysis of long-term hydrographic records, the system of overflow and entrainment that ventilates the deep Atlantic has steadily changed, which led to the sustained and widespread freshening of the deep ocean (Dickson et al. 2002).
The AMOC may be sensitive to changes in salinity based on GrIS runoff and calving; freshening of surface waters in the northern North Atlantic inhibits deep convection that feeds the deep southward branch of the AMOC (e.g., Rahmstorf 1995). The AMOC carries warm upper waters into far-northern latitudes and returns cold deep waters southward to the southern hemisphere. This heat transport contributes substantially to the climate of continental Europe and the Northern North Atlantic region (Hanna et al. 2008), for example, any slowdown in the circulation due to the increasing terrestrial freshwater flux could have important implications for climate change (Bryden et al. 2005). This pathway between the GrIS and North Atlantic/European climate could be a key linkage in a broader climate feedback via ocean circulation, though the extent to which GrIS-induced climate change would, in turn, alter the GrIS is not known.
2.2 Greenland Area Changes
Not only has the GrIS lost mass but it has also faced area recession (Kargel et al. 2011). The land- and marine-terminating outlet glaciers on the periphery of the GrIS have undergone rapid area changes over the last decades (e.g., Howat and Eddy 2011), during which a transition occurred from stability and small fluctuations in marine-terminating glacier frontal positions (1972–1985) to moderate widespread recession in the southeast and western parts of the GrIS (1985–2000), followed by an accelerated net recession in all regions of the ice sheet (2000–2010) (Howat and Eddy 2011). For 2000–2010, the mean net recession rate for frontal positions of GrIS marine-terminating outlet glaciers was 0.11 km yr−1, for 210 outlet glaciers (Howat and Eddy 2011). Box and Decker (2011) measured area changes of 39 widest GrIS marine-terminating glaciers based on Moderate Resolution Imaging Spectroradiometer (MODIS) data, between 2000 and 2010. Overall, for the 39 glaciers, they exposed a cumulative net area of 1,368 km2. The recession in GrIS cover for the last decades for both land- and marine-terminating margins caused changes in the surface albedo and subsequent changes in the energy balance. This climate–ice sheet pathway may establish a positive feedback mechanism and an increase in GrIS melting, for example, due to more surface energy absorption.
3 Glacier and Ice Cap Changes
Half of the estimated global glacier and ice cap (GIC) surface area, and two-thirds of the GIC volume, are located in the circumpolar Arctic region (Radić and Hock 2010). This makes studies of SMB and volume changes in northern latitude GIC essential because of their contribution to global sea-level rise. However, few GIC SMB observations exist. SMB observations from around 25 GICs in the circumpolar Arctic (Alaska, Arctic Canada, Greenland, Iceland, and Svalbard) have been published for 2001–2010 (WGMS 2013), where Box et al. (2018), using up to 44 GIC, estimated the global sea-level contribution from Arctic land ice (1971–2017). This subset represents only a minor fraction of the Arctic’s several thousand GICs. Furthermore, very few GIC has uninterrupted annual records covering at least two or more decades. Even though GICs account for less than 1% of all water on Earthbound in glacier ice, their increasing retreat and mass loss due to iceberg calving and runoff may have dominated the glacial component of the global eustatic sea-level rise during the past century (Radić and Hock 2011; Box et al. 2018). The Arctic Monitoring and Assessment Program (AMAP) identified the Arctic as the largest regional source of land ice to global sea-level rise (2003–2014; AMAP 2017).
The GIC mass balance observations have shown an overall increase in mass loss (Dyurgerov 2010; Cogley 2012; WGMS 2013; Box et al. 2018), heading toward more negative annual SMB during the first 15 years (2001–2016) of the first decade in the twenty-first century. For example, Gardner et al. (2011) showed that Canadian Arctic Archipelago GIC had recently lost 61 ± 7 Gt yr−1 ice in the period 2004–2009. In East Greenland (peripheral to the GrIS), GICs have also lost mass and faced area recession. A study by Mernild et al. (2015a, b), based on satellite observations of 35 GICs in East Greenland, determined a mean areal recession of around 1% per year, indicating that GICs overall have lost 27 ± 24% of their area since 1986. Furthermore, five GICs have melted away, and GICs, on average, have faced a volume recession of one-third since 1986 (Mernild et al. 2015a, b). Specific GICs in East Greenland might be significantly out of equilibrium with the present-day climate and will likely lose at least 70% of their current area and 80% of its volume, even in the absence of further climate changes. Temperature records from coastal stations in East Greenland suggest that recent GIC area and volume losses are out of equilibrium and not merely a local phenomenon; they are indicative of glacier changes in the broader region (Mernild et al. 2011b). Globally, GICs will shed around one-quarter of their present-day volume if they are to reach a size in equilibrium with the present-day climate (Mernild et al. 2013), indicating that Greenland GIC area and volume adjustment lag behind the current climatic forcing (Cogley 2012).
At present, GIC mass losses are raising the mean global sea level by approximately 1.0 mm SLE yr−1). This is about one-third of the total rate of sea-level rise inferred from satellite altimetry, with ocean thermal expansion and ice sheet mass loss accounting for most of the remainder (e.g., Cazenave and Llovel 2010). It has been suggested that GIC SMB losses are expected to dominate the cryospheric contribution to sea-level rise between now and 2100 (Cogley 2012) and that the GIC derived sea-level rise will continue to increase in the future (Dyurgerov and Meier 2005; Meier et al. 2007), with the largest contribution from Arctic circumpolar GICs in Arctic Canada and Alaska.
4 Recent Model Development—A Runoff Routing Model (HydroFlow)
Liston and Mernild (2012) developed a gridded linear reservoir runoff routing model (HydroFlow) to simulate the linkages between runoff production from land-based snowmelt and ice melt processes and the associated freshwater fluxes to downstream areas and surrounding oceans. HydroFlow was specifically designed to account for the glacier, ice sheet, and snow-free and snow-covered land applications. Its performance was verified for a test area in southeast Greenland (Figs. 5.1 and 5.2) that contains the Mittivakkat Glacier (formerly known as Midtluagkat Gletscher (26.2 km2 in 2011); 65°41′N, 37°48′W), the local glacier in Greenland with the longest observed time series of mass balance and ice-front fluctuations. The time evolution of spatially distributed grid cell runoff required by HydroFlow (Liston and Mernild 2012) was provided by the SnowModel (Liston and Elder 2006a; Mernild et al. 2006), i.e., the snow evolution modeling system, driven with observed atmospheric data, for the years 2003 through 2010 (Liston and Mernild 2012). In general, the HydroFlow simulated runoff variations and peaks reproduced available discharge observations from the Mittivakkat Glacier (r2 = 0.77 and 0.63), both in time and volume (Fig. 5.3). For 2003 and 2010, the difference between simulated and observed runoff was ~12,000 m3 (analog to a mean discharge difference of 0.14 m3 s−1) and ~2,200 m3 (0.03 m3 s−1), respectively, where positive numbers mean the model is overestimating observed values, and vice versa. Comparison of simulated and observed peak runoff values indicate a maximum difference of ~267,000 m3 (analog to a maximum discharge difference of 3.10 m3 s−1) for 2003 and ~453,000 m3 (5.25 m3 s−1) for 2010 (Fig. 5.3). Overall, for the two analyzed years, HydroFlow was able to reproduce mean and peak control values within acceptable limits (Liston and Mernild 2012).

The Mittivakkat Glacier simulation domain, in southeast Greenland (around 10–12 km northwest of the settlement Tasiilaq), with topography (100-m contour interval) and land cover characteristics. Also shown are the two automatic weather stations, Station Nunatak (515 m a.s.l.) and Station Coast (25 m a.s.l.), and the hydrometric station at the A4 catchment outlet (for locations of the different catchment outlets see Fig. 5.2). The inset figure indicates the general location of the Mittivakkat Glacier region (red dot) in southeast Greenland. The domain coordinates can be converted to UTM by adding 548 km to the west–east origin (easting) and 7281 km to the south–north origin (northing) and converting to meters (Mernild and Liston 2012, © American Meteorological Society. Used with permission)

Mittivakkat Glacier complex (represented by the bold black line) and simulation domain including individual glacier basins (Area 1–11) (represented by different colors), stream/river flow network (represented by white lines), and locations B1, A4, C1, D1, A3, A2, and A1 for the simulated hydrographs

a Observed and simulated runoff at the location for 2003 (the year with the second-lowest cumulative runoff); and b 2010 (the year with the highest cumulative runoff) (r2 = square of the linear correlation coefficient), the observation period is shorter than the simulation period; c, d simulated hydrographs at different locations upstream for outlet A4; and e, f simulated hydrographs at outlets B1, A4, C1, and D1 to the Sermilik Fjord (for outlet locations see Fig. 5.2) (Mernild and Liston, 2012, © American Meteorological Society. Used with permission)
Figure 5.3 display the within-catchment runoff variability by plotting the hydrographs at locations A1–A4 for 2003 and 2010 within the Mittivakkat Glacier catchment. Consistent with the model formulation, the hydrographs for both 2003 and 2010 increased in volume and runoff period downstream as the flow network progressed down basin from point A1–A4. This occurs in response to both decreasing elevation and increasing drainage area. Further, seasonal runoff variations were similar for all four locations, with the most pronounced being at the outlet (A4) and the least pronounced being upstream (A1).
The simulated runoff values at the B1, A4, C1, and D1 catchment outlets (Fig. 5.3), display the spatial variation in coastal runoff contributions from these primary catchments that drain into Sermilik Fjord, Southeast Greenland. At regional scales, the spatial variation in runoff was closely associated with variations in glacier cover, size of the drainage area, and travel distance within each catchment (Fig. 5.3). The watersheds upstream of outlets A4 and C1 produced the greatest runoff contribution to Sermilik Fjord.
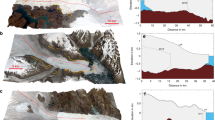
The 2003–2010 mean cumulative annual discharge (m3) into Sermilik Fjord from catchment outlets B1, A4, C1, and D1 is illustrated in Fig. 5.3. Figure 5.4 displays the mean cumulative annual discharge (m3) from all the catchment outlets along the eastern coast of the simulation domain (they all feed into Sermilik Fjord) for 2003 and 2010. The dominance of the B1, A4, C1, and D1 outlets are clear in Fig. 5.4. The percentage of total annual discharge represented by the B1, A4, C1, and D1 outlets is also shown. In 2003 and 2010, 84% and 90%, respectively, of the eastern coastal discharge came from outlets B1, A4, C1, and D1. Averaged over the 2003–2010 simulation period, outlets B1, A4, C1, and D1 contributed approximately 90% of the annual discharge (128.9 ± 34.1 × 106 m3 yr−1 with a standard deviation of ± 34.1 × 106 m3 yr−1) to Sermilik Fjord. Taken individually, the average contributions from C1 (38.5 ± 22.2 × 106 m3 yr−1) and A4 (40.9 ± 13.7 × 106 m3 yr−1) were each approximately 30% of the total, and contributions from B1 (14.7 ± 5.8 × 106 m3 yr−1) and D1 (22.4 ± 8.0 × 106 m3 yr−1) were each approximately 15% of the total. For the watersheds, without glacier cover (these comprised approximately 90% of the catchments) the cumulative annual discharge to the ocean was relatively low, in the range of 1.0 × 104 to 1.0 × 105 m3 y−1. This uneven spatial distribution of runoff to the ocean (Fig. 5.4) is expected to occur throughout East Greenland where the strip of land between the GrIS and ocean contains thousands of individual glaciers, ice caps, and ice-free areas peripheral to the Ice Sheet.

a 2003–10 mean and standard deviation of annual simulated cumulative runoff to the Sermilik Fjord from catchment outlets D1, C1, A4, and B1 (106 m3 y−1); and b spatial runoff distribution to Sermilik Fjord for 2003 and 2010. The percentages indicate the fraction of annual discharge into Sermilik Fjord from outlets D1, C1, A4, and B1. Note the ordinate logarithmic scale (Mernild and Liston 2012, © American Meteorological Society. Used with permission)
One source of uncertainty in the HydroFlow simulations results from processes occurring within the watershed of interest that are not included in the modeling system. While the improvements included in HydroFlow can be thought of as a step forward in runoff simulations for snowmelt and ice melt on glaciers, ice sheets, and snow-covered land, there are still numerous water-transport-related processes that are not explicitly included in the model simulations. HydroFlow, for example, as with most other models, omits processes such as temporal variations in (1) englacial bulk water storage and release, including drainage from glacial surges and drainage of glacial-dammed water (long-term build-up of storage followed by short-term release); (2) melt contributions from internal glacial deformation, geothermal heat, basal sliding, and the internal drainage system as it evolves during the melt season; (3) englacial water flow between neighboring catchments; and 4) open channel streamflow routing. In addition, SnowModel is not a dynamic glacier model, and routines for simulating changes in the glacier area, size, surface elevation, and seasonal variations in the internal drainage system, are not yet represented within the modeling system.
Uncertainty in the simulated runoff discharges also occurs as a result of oversimplifications of the processes represented within the modeling system and due to simplified representations of the atmospheric forcing (e.g., air temperature and precipitation). At present, physically based glacier runoff models are simple representations of a complex natural system (e.g., Hock and Jansson 2005). But with the HydroFlow routines for estimating drainage area, watershed divides, the flow-accumulation network, the time evolution and spatial distribution of different water transport mechanisms, and the runoff transient times, we are now able to provide information about the temporal and spatial variability in runoff at each point within the catchment, including the watershed outlet and at every watershed, large and small, within the simulation domain. A further advantage of this spatially distributed modeling approach is that it also allows detailed analyses of within-watershed runoff-related processes such as those associated with solute transport and sediment erosion and accumulation (Hasholt and Mernild 2006). While good model performance at gauging stations does not ensure good performance at sites upstream of those stations (Refsgaard 1997), the nested watersheds within the simulation domain considered herein have similar physical and climatological conditions as the outlets of the main catchments. Therefore, we also expect similar behavior in them. In addition, the physically based representations contained within MicroMet (Liston and Elder 2006b) and SnowModel make them appropriate tools to simulate rainwater, snowmelt, and ice melt fluxes, and it is also appropriate to use their outputs to drive HydroFlow, for both gauged and ungauged basin applications. At the largest scale, the combination of MicroMet, SnowModel, and HydroFlow provides the ability to estimate the time evolution and spatial distribution of runoff into adjacent oceans.
5 Greenland Freshwater Runoff
5.1 Regional Runoff Distribution
Mernild and Liston (2012) examined the GrIS surface mass balance conditions, including GrIS and Greenland surface runoff, the spatial distribution of Greenland runoff to the adjacent seas, and their changes from 1960 to 2010. They coupled the HydroFlow runoff routing model with SnowModel. They ran the coupled modeling system over the GrIS and all surrounding land and peripheral glaciers and ice caps for the period 1960 through 2010, using a 5-km grid and outputting daily hydrological variables. HydroFlow divided all of Greenland, including the GrIS, into individual drainage basins (Fig. 5.5) and simulated the associated grid connectivity—its water routing network—within each individual watershed; in total, there were n = 3,150 individual drainage catchments. SnowModel and HydroFlow were forced with observed meteorological data, and the overall trends and annual variability in air temperature and runoff were related to both variations and trends in the Atlantic Multidecadal Oscillation (AMO) index (e.g., Folland et al. 1986; Schlesinger and Ramankutty 1994; Kerr 2000; Chylek et al. 2009, 2010) to illustrate the impact from regional weather systems and the impacts from major episodic volcanic eruptions as part of an effort to understand the runoff response to natural forcing. They further examined whether the spatial runoff distribution from the warmest decade on record (2001–10) (Hansen et al. 2010) was different from the runoff distribution from both the average of 1960–69 and the average of 1960–2010.

a Greenland; and b simulated individual Greenland drainage basins (represented by multiple colors)
5.2 Climate and GrIS Mass Balance
From 1960 to 2010, the Greenland mean summer air temperature and mean annual air temperature (MAAT) increased an average of 1.9 and 1.2 °C, respectively. The last decade (2000–2010) has been the warmest decade on record (Hansen et al. 2010). However, before the mid-1980s, the trend in mean summer temperature correlates significantly with MAAT and was in the antiphase, meaning JJA was on average increasing while MAAT was on average decreasing, and hereafter the trends were in phase and increasing. Since the mid-1980s, mean summer temperature and MAAT increased an average of 1.5º and 2.2 °C, respectively (Mernild et al. 2011a). Hanna et al. (2008) found an increase in coastal Greenland summer temperatures by 1.8 °C during 1991–2006.
The overall variations in SnowModel simulated mean summer temperature explain the variance significantly, with the smoothed trends of the AMO index. A similar condition between summer temperature and AMO variations was confirmed by Hanna et al. (2012). From 1960 to the mid-1970s, the smoothed AMO index, on average, decreased, and thereafter, it increased through 2010, corresponding with the trend in simulated mean summer temperature for Greenland. Chylek et al. (2010) showed that Arctic temperatures were highly correlated with the AMO index, suggesting the Atlantic Ocean as a possible source of Arctic climate variability. This was also the case for the simulated Greenland MAAT for which the explained variance was significant for the periods after the mid-1980s (1986–2010) and before that time (1960–1985); however, the latter period had a higher r2-value that explained more of the variance (Mernild and Liston 2012).
Figure 5.6 presents time series (1960–2010) of simulated GrIS surface hydrological conditions: net precipitation (precipitation minus evaporation and sublimation), surface runoff, and SMB on an annual basis for the calendar year (1 January–31 December). GrIS mass gain (accumulation) was calculated as positive and mass loss (ablation) was considered negative. The average 1960–2010 simulated GrIS net precipitation was 489 ± 53 km3 yr−1, varying from 456 ± 46 km3 yr−1 in 1960–1969 to 516 ± 38 km3 yr−1 in 2000–2010. The simulated average GrIS net precipitation was just below the range of recently reported average net precipitation values, and these studies all reported similar annual average increasing precipitation trends to those simulated by SnowModel (Box et al. 2006; Hanna et al. 2005, 2008; Fettweis 2007; Fettweis et al. 2008; Ettema et al. 2009). Averaged for the GrIS, 85% of the SnowModel simulated precipitation fell as snow, with the rest falling as rain.

a Simulated mean summer (JJA) and mean annual air temperature (MAAT) Greenland anomaly time series for 1960–2010; b unsmoothed and smoothed (10-yr running average) Atlantic multidecadal oscillation (AMO) index; c GrIS simulated net precipitation P, surface mass balance (SMB), and surface runoff R time series for 1960–2010; and d simulated surface GrIS runoff, land strip area (area outside the GrIS) runoff, and Greenland runoff time series for 1960–2010. The Agung (1963; Bali), El Chichón (1982; Mexico), and Mt. Pinatubo (1991; Philippines) volcanic eruptions are marked in d
On a decadal time scale, the GrIS SMB decadal variability ranged from 220 ± 86 km3 yr−1 in 1970–1979 to 86 ± 72 km3 yr−1 in 2000–2010. The simulations showed the largest (most positive) SMB near the beginning of the simulation period, with a subsequent mass loss as temperatures and runoff increased. For the GrIS, during 1960–2010 the accumulation zone covered an average of 90% of the total GrIS area, and the ablation zone an average of 10%. In contrast, the simulated area generating surface runoff covered an average of 12% and surface melt an average of 15% of the GrIS (Mernild and Liston 2012). A maximum SnowModel simulated ablation zone width of 125 km occurred in the southwest region of the GrIS and was almost as wide for the northeast GrIS. In contrast, the narrowest ablation zone had a maximum width of 10–20 km and occurred in both the northwest and the southeast regions of the GrIS, a distribution predominantly following elevation changes and the spatial variability in precipitation. Therefore, the widest ablation zones occurred in relatively low precipitation regions, and the narrowest zones occurred in the high precipitation areas. The spatial variability in simulated GrIS ablation zones was in general agreement with Ettema et al. (2009).
5.3 Spatial and Temporal Distributions and Trends
Figure 5.6 presents the time series of simulated Greenland runoff (1960–2010) and individual runoff contributions from the GrIS and from the land area—including thousands of glaciers and ice caps—located between the ice sheet and the surrounding oceans. The 1960–2010 average, simulated Greenland runoff was 481 ± 85 km3 yr−1 (in a sea-level perspective 1.3 ± 0.2 mm SLE yr−1), varying from 413 ± 56 km3 yr−1 (1.1 ± 0.2 mm SLE yr−1) in 1960–69 to 572 ± 53 km3 yr−1 (1.6 ± 0.2 mm SLE yr−1) in 2000–10, following the trends in air temperature and precipitation (Fig. 5.6a, c).
Regionally, the average Greenland 1960–2010 simulated runoff to the adjacent seas was greater in the western half of Greenland, 263 km3 yr−1 (equals 55% of the total Greenland runoff), than in the eastern half of Greenland, 218 km3 yr−1 (45%) (indicating an insignificant regional difference). The average Greenland 1960–2010 simulated runoff to the adjacent seas was greatest from the south part (88 km3 yr−1) and southwest part (82 km3 yr−1) and lowest from the east part (45 km3 yr−1) and southeast sector (49 km3 yr−1) (1960–2010). The regional distribution of runoff to the surrounding oceans appears to be in general agreement with Lewis and Smith (2009).
The runoff simulations indicated that 69% of the runoff to the surrounding seas originated from the GrIS and 31% came from the land area. For the land area, the trend in simulated runoff was constant (Fig. 5.6d), with an average runoff of 148 ± 41 km3 yr−1. A possible explanation for this is because the glaciers and ice caps are already melting all summer, and an enhanced melt season and melt extent were therefore not possible. In contrast, simulated GrIS runoff, on average, has increased 3.9 km3 yr−1 since 1960, and there has been an enhanced surface melt extent (Fettweis et al. 2011; Mernild et al. 2011a).
The impact on runoff variability during 1960–2010, due to major episodic volcanic eruptions such as Agung (1963), El Chichón (1982), and Mt. Pinatubo (1991) (Fig. 5.6d), and in the years immediately after do not appear to be systematic. For the year immediately after Agung and Pinatubo, simulated annual runoff values decreased, and they increased after El Chichón. The simulated Greenland runoff variations appear to be due to a combination of annual variations in both temperature and precipitation that are controlled by factors other than volcanic activity. Hanna et al. (2005) stated that global dust veils generated by volcanic activity might cool the polar regions and suppress ice sheet melt, but clearly, there are other aspects of the climate system that may offset the volcanic signal. In contrast, the general climate forcing conditions captured by variations in the smooth AMO index time series can be traced in the overall Greenland runoff pattern (Fig. 5.6d). In general, years with positive AMO index equaled years with relatively high Greenland simulated runoff volume (and relatively high mean summer temperatures), and years with negative AMO index had low runoff volume, with a significantly explained variance (r2 = 0.73, p < 0.01) between the AMO index and Greenland runoff.
Generally, relatively high average surface runoff values were simulated for the southwest and southeast regions of Greenland, and sporadic high values were simulated in the north region with maximum values of 4–6 m water equivalent (w.e.) yr−1. Elsewhere, the runoff was less with the lowest values in the northeast and northwest regions of less than 0.5 m w.e. yr−1. This spatial simulated surface runoff distribution is largely in agreement with values from Lewis and Smith (2009). This regional pattern in surface runoff can be largely explained by the spatial distribution of precipitation, since snowfall (end-of-winter accumulation) and surface runoff are negatively correlated through surface albedo, snow depth, and snow characteristics (e.g., snow cold content) (Hanna et al. 2008; Ettema et al. 2009). For dry precipitation regions (west and northeast Greenland), the relatively low end-of-winter snow accumulation melts relatively fast during spring warmup. After the winter snow accumulation (albedo 0.50–0.80) has ablated, the ice surface albedo (0.40) promotes a stronger radiation driven ablation and surface runoff, owing to the lower ice albedo. For wet precipitation regions (southeast and northwest Greenland) the relatively high end-of-winter snow accumulation, combined with frequent summer snowfall precipitation events, keeps the albedo high. Therefore, in wet regions, it generally takes a longer time to melt the snowpack compared to dry regions before ablating the underlying glacier ice. For glaciers, ice caps, and the GrIS, snowpack retention and refreezing processes suggest that regions with relatively high surface runoff are synchronous with the relatively low end-of-winter snow accumulation because more meltwater was retained in the thicker snowpack, reducing runoff to the internal glacier drainage system (e.g., Hanna et al. 2008; Reijmer et al. 2012; Machguth et al. 2018).
For the GrIS itself, 87% of the GrIS runoff increase was due to increases in melt extent, 18% was due to increases in melt duration, and a reduction of 5% occurred because of a decrease in melt rates (87% + 18% – 5% = 100%). For the land area surrounding the GrIS, the weak increase in runoff to the surrounding oceans over the period 1960–2010 was due to a 0% change in melt extent, with a 108% increase due to an increase in melt duration and a runoff reduction of 8% due to a decrease in melt rates (0% + 108% – 8% = 100%). In summary, the strong increase in GrIS runoff was largely due to increases in melt extent, while the relatively small increase in land area runoff was mainly due to changes in melt duration. This and the air temperature increases further suggest that the increase in discharge from Greenland to the surrounding oceans is primarily the result of increasing air temperatures that allow the melt to occur over more area of the GrIS. In addition, our analysis suggests that increases in the GrIS melt extent play a relatively larger role in the simulated runoff increases than do the melt rate and melt duration changes.
6 Model Limitations and Future Research Topics
In MicroMet, only one-way atmospheric coupling was provided, where the meteorological conditions were prescribed at each time step. In the natural system, the atmospheric conditions would be adjusted in response to changes in surface conditions and properties (Liston and Hiemstra 2011). Due to the use of the 5-km horizontal grid increments, snow transport, and blowing-snow sublimation processes (usually produced by SnowTran-3D in SnowModel) were excluded from the simulations because blowing snow does not typically move completely across 5-km distances. Static sublimation was, however, included in the model integrations. In HydroFlow, the generated catchment divides and flow network was controlled by the digital elevation model (DEM), i.e., exclusively by the surface topography and not by the development of the glacial drainage system. The role of GrIS bedrock topography on controlling the potentiometric surface and the associated meltwater flow direction was assumed to be a secondary control on discharge processes (Cuffey and Paterson 2010).
An example of the HydroFlow generated catchment divides and flow network is illustrated in detail in Figs. 5.2 and 5.5. Because the DEM is time-invariant, no changes though feedbacks from a thinning ice, ice retreat, and from changes in hypsometry will influence the catchment divides and the flow network patterns, including the glacial drainage system. Changes in runoff over time are therefore solely influenced by the climate signal and the surface snow and ice cover conditions (runoff was generated from gridded inputs from rain, snowmelt, and ice melt), not by the glacial drainage system. In HydroFlow, the meltwater flow velocities were gained from dye tracer experiments conducted both through the snowpack (in early and late summer) and through the englacial and subglacial environments (Mernild et al. 2006).
7 Summary and Potential Research Topics
We have investigated the impact of changes in Greenland weather and climate conditions on surface hydrological processes and runoff for the 50-year period 1960–2010. This included quantifying the spatial distribution and trends of meltwater and freshwater runoff into the adjacent seas from the GrIS and the land, ice cap, and glacier areas between the GrIS and surrounding oceans. The merging of observed atmospheric forcing datasets with SnowModel—a snow and ice evolution system—and HydroFlow—a runoff routing system—allowed a detailed (5 km, daily) analysis and mapping of spatial variations in Greenland discharge to the adjacent seas and provided insights into the regional distribution of runoff features and quantities. Individual drainage catchments (n = 3,150), each with an individual flow network, were estimated for Greenland before simulating runoff to down flow areas and the surrounding oceans. Given the severe dearth of Greenland discharge observations, runoff simulations are crucial for understanding Greenland spatial and temporal runoff variations; this runoff explains half of the recent mass loss of the GrIS (van den Broeke 2009). Overall, Greenland has warmed and the runoff has increased during the last 50 years with the greatest runoff increase occurring in southwest Greenland and lower runoff increases occurring in northeast Greenland.
The spatial runoff distributions show greater hydrological activity in southwest Greenland and lowest for the northeast Greenland region, supporting the hypothesis that discharges into the adjacent seas are greatest in regions where snowfall (end-of-winter snow accumulation) is generally low and discharge is least in regions where snowfall is high. These processes and relationships are crucial for understanding the spatial distribution of runoff and its contribution to the surrounding oceans, and the linkages among a changing climate and the associated changes in runoff magnitudes and distributions. The Greenland simulations showed distinct regional (scale) runoff variability throughout the simulation domain.
Runoff magnitudes, the spatial patterns from individual Greenland catchments, and their changes through time (1960–2010) were simulated in an effort to understand runoff variations to adjacent seas and to illustrate the capability of SnowModel (a snow and ice evolution model) and HydroFlow (a runoff routing model) to link variations in the terrestrial runoff with ocean processes and other components of Earth’s climate system.
Significant increases in air temperature, net precipitation, and surface runoff lead to enhanced and statistically significant Greenland ice sheet (GrIS) surface mass balance (SMB) loss. Total Greenland runoff to the surrounding oceans increased 30%, averaging 481 ± 85 km3 yr−1. Averaged over the period, 69% of the runoff to the surrounding seas originated from the GrIS and 31% came from outside the GrIS from rain and melting glaciers and ice caps. The runoff increase from the GrIS was due to an 87% increase in melt extent, 18% from increases in melt duration, and a 5% decrease in melt rates (87% + 18% − 5% = 100%). In contrast, the runoff increase from the land area surrounding the GrIS was due to a 0% change in melt extent, a 108% increase in melt duration, and an 8% decrease in melt rate. In general, years with positive AMO index equaled years with relatively high Greenland runoff volume and vice versa. Regionally, a runoff was greater from western than eastern Greenland. Since 1960, the data showed pronounced runoff increases in west Greenland, with the greatest increase occurring in the southwest and the lowest increase in the northwest.
GIC and GrIS mass balance and runoff observations and modeling have expanded over the last several decades as the demand to understand and describe complicated physical atmosphere–snow–ice–water processes and interactions has increased. Even though over the last decades we have gained information about GIC and the GrIS surface mass balance, runoff, and mass balance conditions, there is still research to be conducted with the purpose of identifying, monitoring, quantifying, and determining processes, variabilities, and interactions regarding hydrological processes and the water balance related to GIC and the GrIS.
GIC are reservoirs of water, and our knowledge about future GIC mass balance and runoff projections is limited. In addition to already published GIC model studies, research that quantifies future runoff conditions would improve our understanding of individual GIC behavior: Such a study would be the first to quantify, for example, the runoff Tipping Points for GIC. After the occurrence of the runoff Tipping Point, the annual GIC runoff amount will, on the average, decline as reductions in glacier areas outweigh the effect of glacier melting (AMAP 2011). Such future simulations will also be able to help answer questions such as: within what range of years can we expect the runoff Tipping Point to occur for individual GIC?
We also need to better understand the link between the freshwater flux (and the HydroFlow spatiotemporal simulated runoff variability) and the hydrographic conditions near the GrIS glacier–ocean boundaries. This could be done, for example, for Ilulissat Icefjord, West Greenland, and Sermilik Fjord, Southeast Greenland, using, for example, quasi-continuous water salinity and temperature observations obtained by ringed seals near tidewater glacier margins. Instrumented seals provide a platform to examine the impacts from terrestrial freshwater on the otherwise inaccessible waters beneath the dense ice melangé within the first 0–10 km of a glacier’s calving front (Mernild et al. 2015a, b).
The spatiotemporal distribution of freshwater runoff from Greenland is expected to have an effect on the North Atlantic oceanic conditions, including the AMOC (Rahmstorf et al. 2005), and their impacts on the climate system (Bryden et al. 2005). The HydroFlow modeling tool is capable of providing the missing connection between terrestrial water fluxes and ocean circulation features such as the AMOC. Historically, the representation of Greenland freshwater discharge into the oceans has been either non-existent or unrealistically simplistic. For example, ocean models have traditionally placed the freshwater runoff flux directly into the midocean areas (Weijer et al. 2012) rather than accurately accounting for the spatial and temporal distributions of actual Greenland runoff.
References
AMAP (2011) Snow, water, ice, and permafrost in the arctic (SWIPA): climate change and the cryosphere. Arctic monitoring and assessment programme (AMAP). Oslo. Norway. Xii+538 pp
AMAP (2017) Snow, water, ice and permafrost in the arctic (SWIPA) 2017. Arctic monitoring and assessment programme (AMAP), Oslo, Norway. xiv+269 pp
Bamber, J. L., Steig, E., and Dahl-Jensen, D. 2009. What is the tipping point for the Greenland Ice Sheet. C15, Nuuk Climate Days, Changes of the Greenland Cryosphere Workshop & The Arctic Freshwater Budget International Symposium. Nuuk, Greenland, 25–27 August 2009
Box JE, Bromwich DH, Veenhuis BA, Bai L-S, Stroeve JC, Rogers JC, Steffen K, Haran T, Wang S-H (2006) Greenland ice sheet surface mass balance variability (1988–2004) from calibrated Polar MM5 output. J Clim 19:2783–2800
Box JE, Colgan W (2013) Greenland Ice sheet mass balance reconstruction. Part III: Marine ice loss and total mass balance (1840–2010). J Clim 26:6990–7002
Box J, Colgan W, Bert, Wouters B, Burgess D, O’Neel S, Thomson L, Mernild SH (2018) Global sea-level contribution from arctic land ice: 1971 to 2017. Accepted Environ Res Lett
Box JE, Decker DT (2011) Greenland marine-terminating glacier area changes: 2000–2010. Ann Glaciol 52:91–98
Bryden HL, Longworth HR, Cunningham SA (2005) Slowing of the Atlantic meridional overturning circulation at 25°N. Nature 438:655–657
Cappelen J (ed) (2013) Weather and climate data from Greenland 1958–2012—observation data with description. DMI Technical Report 13-11, Copenhagen, 23.
Cazenave A, Llovel W (2010) Contemporary Sea Level Rise. Ann Rev Mar Sci 2:145–173. https://doi.org/10.1146/annurev-marine-120308-081105
Church JA, Clark PU, Cazenave A, Gregory JM, Jevrejeva S, Levermann A, Merrifield MA, Milne GA, Nerem RS, Nunn PD, Payne AJ, Pfeffer WT, Stammer D, Unnikrishnan AS (2013) Sea level change. In: Stocker TF, Qin D, Plattner G-K, Tignor M, Allen SK, Boschung J, Nauels A, Xia Y, Bex V, Midgley PM (eds) Climate change 2013: the physical science basis. Contribution of working group i to the fifth assessment report of the intergovernmental panel on climate change. Cambridge University Press, Cambridge, United Kingdom and New York, NY, USA
Chylek P, Folland CK, Lesins G, Dubey MK (2010) Twentieth century bipolar seesaw of the Arctic and Antarctic surface air temperatures. Geophys Res Lett 37:L08703. https://doi.org/10.1029/2010GL042793
Chylek P, Folland CK, Lesins G, Dubey MK, Wang M (2009) Arctic air temperature change amplification and the Atlantic multidecadal oscillation. Geophys Res Lett 36:L14801. https://doi.org/10.1029/2009GL038777
Cogley JG (2012) The future of the world’s glaciers. In: Henderson-Sellers A, McGuffie K (eds) The future of the world’s climate, 197–222. Elsevier, Amsterdam
Cuffey KM, Paterson WSB (2010) The physics of glaciers. Fourth Edition. Elsevier, pp 693
Dickson B, Yashayaey I, Meincke J, Turrell B, Dye S, Holfort J (2002) Rapid freshening of the deep North Atlantic Ocean over the past four decades. Nature 416:832–837
Dyurgerov MB (2010) Data of glaciological studies—Reanalysis of glacier changes: From the IGY to the IPY, 1960–2008. Publication 108, Institute of Arctic and Alpine Research, 116 pp
Dyurgerov MB, Meier MF (2005) Glaciers and the changing earth system: a 2004 snapshot, occas. Paper 58, 117 pp. Institute of Arctic and Alpine Research, Boulder, Colorado
Enderlin EM, Howat IM, Jeong S, Hoh M-J, van Angelen JH, van den Broeke MR (2014) An improved mass budget for the Greenland ice sheet. Geophys Res Lett 41(3):866–872
Ettema J, van den Broeke MR, van Meijgaard E, van den Berg WJ, Bamber JL, Box JE, Bales RC (2009) Higher surface mass balance of the Greenland ice sheet revealed by high-resolution climate modeling. Geophys Res Lett 36:L125
Fettweis X (2007) Reconstruction of the 1979–2006 Greenland ice sheet surface mass balance using the regional climate model MAR. The Cryosphere 1:21–40
Fettweis X, Hanna E, Gallee H, Huybrechts P, Erpicum M (2008) Estimation of the Greenland ice sheet surface mass balance during 20th and 21st centuries. The Cryosphere 2:117–129
Fettweis X, Tedesco M, van den Broeke MR, Ettema J (2011) Melting trends over the Greenland ice sheet (1958–2009) from spaceborne microwave data and regional climate models. The Cryosphere 5:359–375
Folland CK, Palmer T, Parker DE (1986) Sahel rainfall and worldwide sea temperatures. Nature 320:602–607
Gardner AS, Moholdt G, Wouters B, Wolken GJ, Burgess DO, Sharp MJ, Cogley JG, Braun C, Labine C (2011) Sharply increased mass loss from glaciers and ice caps in the Canadian Arctic Archipelago. Nature 473(7347):357–360
Hall DK, Comiso JC, DiGirolamo NE, Shuman CA, Box JE, Koenig LS (2013) Variability in the surface temperature and melt extent of the Greenland ice sheet from MODIS. Geophys Res Lett 40(10):2120–2144
Hanna E, Fettweis X, Mernild SH, Cappelen J, Ribergaard M, Shuman C, Steffen K, Wood L, Mote T (2014) Atmospheric and oceanic climate forcing of the exceptional Greenland Ice Sheet surface melt in summer 2012. Int J Climatol 34:1022–1037. https://doi.org/10.1002/joc.3743
Hanna E, Huybrechts P, Janssens I, Cappelen J, Steffen K, Stephens A (2005) Runoff and mass balance of the Greenland ice sheet: 1958–2003. J Geophys Res 110:D13108
Hanna E, Huybrechts P, Steffen K, Cappelen J, Huff R, Shuman C, Irvine-Fynn T, Wise S, Griffiths M (2008) Increased runoff from melt from the Greenland ice sheet: a response to global warming. J Clim 21:331–341
Hanna E, Mernild SH, Cappelen J, Steffen K (2012) Recent warming in Greenland in a long-term instrumental (1881–2012) climatic context. Part 1: Evaluation of surface air temperature records. Environ Res Lett 7:045404
Hansen J, Ruedy R, Sato M, Lo K (2010) Global surface temperature change. Rev Geophys 48:RG4004
Hasholt B, Mernild SH (2006) Glacial erosion and sediment transport in the Mittivakkat Glacier catchment, Ammassalik island, southeast Greenland, 2005. IAHS 306:45–55
Hock R, Jansson P (2005) Modeling glacier hydrology. Anderson MG, McDonnell J (eds), Enzyclopedia of Hydrologcial Sciences, vol 4. John Wiley & Sons, Ltd, pp 2647–2655
Howat IM, Eddy A (2011) Multi-decadal retreat of Greenland’s marine-terminating glaciers. J Glaciol 57:389–396
Joughin I, 7 others (2008) Continued evolution of Jakobshavn Isbrae following its rapid speedup. J Geophys Res 113(F4):F04006. https://doi.org/10.1029/2008JF001023
Keegan KM, Albert MR, McConnell JR, Baker I (2014) Climate change and forrest fires synergistically drive widesperad melt events of the Greenland Ice Sheet. Proc Nat Acad Sci 111(22):7964–7967
Kargel JS, Ahlstrøm AP, Alley RB, Bamber JL, Benham TJ, Box JE, Chen C, Christoffersen P, Citterio M, Cogley JG, Jiskoot H, Leonard GJ, Morin P, Scambos T, Sheldon T, Willis I (2011) Brief communication Greenland’s shrinking ice cover: “fast times” but not that fast. The Cryosphere 6:533–537. https://doi.org/10.5194/tc-6-533-2012
Kerr RA (2000) A North Atlantic climate pacemaker for the centuries. Science 288:1984–1985
Lewis SM, Smith LC (2009) Hydrological drainage of the Greenland ice sheet. Hydrol Process 23:2004–2011. https://doi.org/10.1002/hyp.7343
Liston GE, Elder K (2006a) A distributed snow-evolution modeling system (SnowModel). J Hydrometeorol 7:1259–1276
Liston GE, Elder K (2006b) A meteorological distribution system for high-resolution terrestrial modeling (MicroMet). J Hydrometeorol 7:217–234
Liston GE, Hiemstra CA (2011) The changing cryosphere: Pan-Arctic snow trends (1979–2009). J Clim 24:5691–5712
Machguth, M., Box, J. E., Fausto, R. S., and Pfeffer, W. T. 2018. Editorial: Melt Water Retention Processes in Snow and Firn on Ice Sheets and Glaciers: Observations and Modeling. Front. Earth Sci., doi.org/10.3389/feart.2018.00105
Meier MF, Dyurgerov MB, Rick UK, O’Neel S, Pfeffer WT, Anderson RS, Anderson SP, Glazovsky AF (2007) Glaciers dominate eustatic sea-level rise in the 21st century. Science 317:1064–1067
Mernild SH, Holland DM, Holland D, Rosing-Asvid A, Yde JC, Liston GE, Steffen K (2015a) Freshwater flux and spatiotemporal simulated runoff variability into Ilulissat Icefjord, West Greenland, linked to salinity and temperature observations near tidewater glacier margins obtained using instrumented ringed seals. J Phys Oceanogr 45(5):1426–1445. https://doi.org/10.1175/JPO-D-14-0217.1
Mernild SH, Knudsen NT, Lipscomb WH, Yde JC, Malmros JK, Jakobsen BH, Hasholt B (2011a) Increasing mass loss from Greenland’s Mittivakkat Gletscher. The Cryosphere 5:341–348. https://doi.org/10.5194/tc-5-341-2011
Mernild SH, Lipscomb WH, Bahr DB, Radić V, Zemp M (2013) Global glacier retreat: A revised assessment of committed mass losses and sampling uncertainties. The Cryosphere 7:1565–1577
Mernild SH, Liston GE (2012) Greenland freshwater runoff. Part II: Distribution and trends, 1960–2010. J Clim 25(17):6015–6035
Mernild SH, Liston GE, Hasholt B, Knudsen NT (2006) Snow distribution and melt modeling for Mittivakkat Glacier, Ammassalik Island, Southeast Greenland. J Hydrometeorol 7:808–824
Mernild SH, Mote TL, Liston GE (2011b) Greenland ice sheet surface melt extent and trends, 1960–2010. J Glaciol 57(204):621–628. https://doi.org/10.3189/002214311797409712
Mernild SH, Malmros JK, Yde JC, de Villiers S, Wilson R, Hanna E, Knudsen NT (2015) Glacier changes in the circumpolar Arctic and sub-Arctic, mid-1980s to late-2000s/2011. Geografisk Tidsskrift – Danish J Geogr 115(1):39–56. https://doi.org/10.1080/00167223.2015.1026917
Mote TL (2007) Greenland surface melt trends 1973–2007: evidence of a large increase in 2007. Geophys Res Lett 34(22):L22507. https://doi.org/10.1029/2007gl031976
Nghiem S, Hall D, Mote T, Tedesco M, Albert M, Keegan K, DiGirolamo N (2012) The extreme melt across the Greenland ice sheet in 2012. Geophys Res Lett 39:L20502. https://doi.org/10.1029/2012GL053611
Nick FM, Vieli A, Howat IM, Joughin I (2009) Large-scale changes in Greenland outlet glacier dynamics triggered at the terminus. Nat Geosci 2(2):110–114
Pattyn F, Ritz C, Hanna E, Asay-Davis X, DeConto R, Durand G, Favier L, Fettweis X, Goelzer H, Golledge NR, Munneke PK, Lenaerts JTM, Nowicki S, Payne AJ, Robinson A, Seroussi H, Trusel LD, van den Broeke M (2018) The Greenland and Antarctic ice sheets under 1.5 °C global warming. Nat Clim Change 1–9.https://doi.org/10.1038/s41558-018-0305-8
Radić V, Hock R (2010) Regional and global volumes of glaciers derived from statistical upscaling of glacier inventory data. J Geophys Res 115:F01010. https://doi.org/10.1029/2009JF001373
Radić V, Hock R (2011) Regionally differentiated contribution of mountain glaciers and ice caps to future sea-level rise. Nat Geosci 4:91–94
Rahmstorf S (1995) Bifurcations of the Atlantic thermohaline circulation in response to changes in the hydrological cycle. Nature 378:145–149
Rahmstorf S, Coauthors (2005) Thermohaline circulation hysteresis: a model intercomparison. Geophys Res Lett 32:L23605. https://doi.org/10.1029/2005GL023655
Refsgaard JC (1997) Parameterisation, calibration and validation of distributed hydrological models. J Hydrol 198:69–97
Reimer CH, van den Broeke M, Ettema J, Stap LB (2012) Refreezing on the Greenland ice sheet: a comparison of parameterizations. The Cryosphere 6(4):743–762. https://doi.org/10.5194/tc-6-743-2012
Rignot E, Box JE, Burgess E, Hanna E (2008) Mass balance of the Greenland ice sheet from 1958 to 2007. Geophys Res Lett 35:L20502.
Rignot E, Kanagaratnam P (2006) Changes in the velocity structure of the Greenland Ice Sheet. Science 311:986–990
Schlesinger ME, Ramankutty N (1994) An oscillation in the global climate system of period 65–70 years. Nature 367:723
Straneo F, Heimbach P, Sergienko O, Hamilton G, Catania G, Griffies S, Hallberg R, Jenkins A, Joughin I, Motyka R, Pfeffer WT, Price SF, Rignot E, Scambos T, Truffer M, Veili A (2013) Challenges to understanding the dynamic response of Greenland’s marine terminating glaciers to oceanic and atmospheric forcing. BAMS 8:1131–1144. https://doi.org/10.1175/BAMS-D-12-00100.1
Steffen K (1995) Surface energy exchange at the equilibrium line on the Greenland ice sheet during onset of melt. Ann Glaciol 21:13–18
Steffen K, 6 others (2008) Rapid changes in glaciers and ice sheets and their impacts on sea level. In: Abrupt climate change. Reston, VA, US Geological Survey, 29–66. (US Climate Change Science Program: Synthesis and Assessment Product 3.4.)
Tedesco M, Box JE, Cappelen J, Fausto RS, Fettweis X, Hansen K, Mote T, Sasgen I, Smeets CJPP, van As D, van de Wal RSW, Velicogna I (2017) Greenland ice sheet. Arctic Report Card 2017. https://www.arctic.noaa.gov/Report-Card
Tedesco M, 7 others (2011) The role of albedo and accumulation in the 2010 melting record in Greenland. Environ Res Lett 6:014005. https://doi.org/10.1088/1748-9326/6/1/014005
van den Broeke MR, Bamber J, Ettema J, Rignot E, Schrama E, van de Berg WJ, van Meijgaard E, Velicogna I, Wouters B (2009) Partitioning recent Greenland mass loss. Science 326:984–986
van de Wal RSW, Boot W, van den Broeke MR, Smeets CJPP, Reijmer CH, Donker JJA, Oerlemans J (2008) Large and rapid velocity changes in the ablation zone of the Greenland ice sheet. Science 321:111–113
Weijer W, Maltrud ME, Hecht MW, Dijkstra HA, Kliphuis MA (2012) Response of the Atlantic Ocean circulation to Greenland Ice Sheet melting in a strongly-eddying ocean model. Geophys Res Lett 39:L09606
World Glacier Monitoring Service (WGMS) 2013. Glacier mass balance bulletin 2010–2011 (Bulletin No 12) Zemp M, Nussbaumer SU, Naegeli K, Gärtner-Roer I, Paul F, Hoelzle M, Haeberli W, ICSU (WDS)/IUGG (IACS)/UNEP/UNESCO/WMO, Zurich, Switzerland, 106 pp, Publication based on database version. https://doi.org/10.5904/wgms-fog-2013-11
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Mernild, S.H., Liston, G.E., Yang, D. (2021). Greenland Ice Sheet and Arctic Mountain Glaciers. In: Yang, D., Kane, D.L. (eds) Arctic Hydrology, Permafrost and Ecosystems. Springer, Cham. https://doi.org/10.1007/978-3-030-50930-9_5
Download citation
DOI: https://doi.org/10.1007/978-3-030-50930-9_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-50928-6
Online ISBN: 978-3-030-50930-9
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)