
Abstract
Small-scale, shear deformable nanobeams, subjected to quasi-static loads, are analyzed by a nonlocal (integral) elasticity model with the main goal to evaluate the influence of shear deformation on size effects. To this aim a warping parametric model is considered in order to obtain a continuous family of shear deformable beam models which span from the Euler-Bernoulli to the Thimoshenko beam model, passing from the Reddy model. The strain difference based nonlocal elasticity theory is applied under the hypotheses of small displacements and isotropic material. The results, obtained by analysing a cantilever nonlocal nanobeam, indicate that shear deformation has a considerable influence upon size effects.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The beam theories dealing with mechanical problems affected by size effects, nowadays widely used in the context of nano-devices such as actuators or sensors, have received a renewed attention in the last decades (see e.g. [1] and reference therein). Nonlocal approaches in the elastic realm have been proposed in the relevant literature to handle such size effects which render the classical local theories unable to describe diffusive phenomena related to the behavior at a nano-scale structural level. The key idea of those nonlocal models which, among others, are classified as nonlocal integral ones is to introduce at constitutive level some internal material parameters able to describe macroscopically phenomena arising within the micro-structure of the constituent material. In this context a model proposed by the authors in [2] and recently applied to solve some benchmark beam problems [3], namely the strain-difference based nonlocal integral model of Eringen-type, is here considered to investigate on the shear effects on nanobeams in bending. The followed rationale resembles the ones of Reddy [4] and Polizzotto [5] within a local elastic treatment and is here rephrased with reference to the quoted nonlocal elastic integral model. The peculiarities of the solution in terms of deflection, stress distribution and shear warping of the nanobeam cross-section are discussed. In particular, the boundary-value problem will be shown to be governed by three uncoupled integral equations, of which two—related to the beam’s axial stretching e and to the Euler-Bernoulli curvature \(\chi ^{EB}\)—are Fredholm integral equations of the second kind, the other—related to the shear curvature \(\eta \) —possesses strong similarity with the former type of integral equations and can be solved using the same numerical method. Moreover, the input terms of these governing equations are each expressed as a linear combination of some auxiliary loading conditions with (in total) as many constant coefficients as there are boundary conditions. Taking profit from the linearity of the problem and of the superposition principle, an auxiliary integral equation technique is envisioned, by which the beam’s deformations (\(e, \chi ^{EB}, \eta \)), along with the axial and transverse displacements (u, w) and the shear angle \(\gamma \) are determined to within the mentioned constant coefficients, available to accommodate the inherent boundary conditions. A warping function is suitably fixed in order to obtain a continuous family of beam models ranging from a nonlocal Euler-Bernoulli-type nanobeam to a nonlocal Timoshenko-type one, passing through the so-called Reddy-type beam. A cantilever nanobeam under a point load P at the free end is considered and the numerical solutions are reported with particular concern to size effects and to their sensitivity to shear deformation. The results, confirming the well known “smaller is stiffer” phenomena overcoming some recently debated paradoxes [6], introduce some attractive novelties in the description of normal and shear stress distributions at the nanobeam cross section when considering shear deformation, opening the way to future fruitful investigations.
2 Problem Position
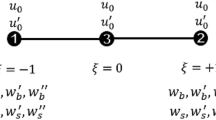
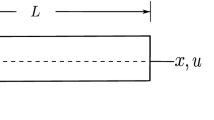
Let us consider a beam of length L, height h and cross rectangular section of area S. The beam is referred to Cartesian orthogonal axes (x, y, z) with x coinciding with the beam axis, z along the beam height, y in the width direction. The kinematics of the beam is described by the (small) displacements
where u(x), u(y) and \(u(z) \equiv w(x)\) indicate the displacements of the beam axes, \(\gamma (x)\) is the shear angle, whereas \(\Theta (z)\) denotes the shear warping function. The latter, following [5] and [7], is chosen in the form
with \(\omega \) warping parameter, real nonnegative value, and \(|z| \le h/2\). It is easily verified that for \(\omega = 0\) it is \(\Theta (z) \equiv 0\) which means that no warping is present, (as in the Euler-Bernoulli beam), whereas for \(\omega = \infty \) it is \(\Theta (z) \equiv z\) that is no warping, but with a nonzero shear rotation (as in the Timoshenko beam). The meaningful deformation components of the beam associated to (1) are
where \(e(x) = u^\prime (x)\) (axial stretching), \(\chi (x) = - w^{\prime \prime }(x)\) (bending curvature), and \(\eta (x) = \gamma ^\prime (x)\) (shear curvature).
2.1 Beam’s Constitutive Equations
In the follow it is assumed that the material obeys the strain-difference based nonlocal model as described in [2] and [3], so that the stresses generated by the strain field (3), within the isotropic elastic beam, are
where E = Young modulus, \(\mu \) = shear modulus, whereas \({\mathcal J}\) is an integral operator defined as
The kernel function \(\kappa (x,\bar{x})\) entering the integral operator \({\mathcal J}\) is defined as
and depends on the influence function \(g(x,\bar{x}):=\frac{1}{2\ell }\exp \bigl (-\frac{|x-\bar{x}|}{\ell }\bigr )\) as well as on the weight function \(\Gamma (x):= \int _0^L g(x,\bar{x})\,{\mathrm d}\bar{x}.\) Moreover, \(s(x):= 1 + \alpha \, \Gamma ^2 (x)\), while \(\phi (x,\ldots )\) is a function of x.
Starting from Eq. (4) the beam’s constitutive equations, written in terms of stress resultants, are
In (7) N, M and Q denote the standard stress resultants of the shear deformable beam, while \(\widehat{M}\) and \(\widehat{Q}\), defined as \(\left[ \widehat{M}, \widehat{Q} \right] _x = \int _S \left[ \Theta (z) \sigma _{xx}, \, \Theta ^{\prime }(z) \sigma _{xz} \right] _x {\mathrm d}a\), are the warping stress moment and the warping shear force, respectively. Here I is the second area moment, while the (non-dimensional) quantities (a, b, c, d) denote the warping coefficients which, in the present case of isotropic material and rectangular cross section, turn out to be functions of the warping parameter \(\omega \) and defined as
3 The Beam Problem
The beam’s equilibrium equations and boundary conditions can be derived through the principle of virtual power (PVP). Denoting by upper tildes the virtual kinematic variables, the PVP reads as
where \(\bar{N}, \bar{Q},\bar{M}\) and \(\bar{C}\) denote assigned resultant forces and couples applied at the free ends, while \(b_x (x,z)\) and \(b_z (x,z)\) are distributed body forces acting quasi-statically. Equation (9) has to be satisfied identically for any choice of the virtual displacements and strains complying with Eqs. (1) and (3) along with the conditions \(\tilde{u} = \tilde{w} = \tilde{w}^{\prime } = \tilde{\gamma }= 0\) at the constrained ends where \(u, w, w^{\prime }\) and \(\gamma \) are specified, that is,
Substituting (1) and (3) into (9) and operating in a straightforward manner, we can obtain the field equilibrium equations of the beam as
where it is
The boundary conditions imply that at every beam end it must be:
The boundary conditions of (13)\(_4\) are explicitly affected by shear warping, the other boundary conditions are as the classical ones. It may be convenient to fix the value of the absolute rotation \(\phi \) at one end, then, since \(\gamma = \phi +w^{\prime }\), this condition is equivalent to \(\gamma = \bar{\phi }+ w^{\prime }\) at that end while \(\widehat{M}\) is free.
Next, by integration of the differential Eqs. (11) we can obtain a closed form representation of the class of stress resultants satisfying the field equilibrium equations as follows:
where the equality \(Q(x) = c(\omega ) \widehat{Q}(x)\)/\( d(\omega ) \) has been used and \(A_1\), \(B_1\), \(B_2\), C are non-dimensional constants depending on the boundary conditions. It has been also set:
In the case of statically determinate beams the expressions of \(N, M, \widehat{M}, Q\) prove to be uniquely determinate.
Next, substituting Eq. (7) into the left-hand side of (14), the following integral equations can be obtained
Equations (16–18) constitute a set of integral equations governing the beam problem useful for the evaluation of the beam deformations e(x), \(\chi (x)\), \(\eta (x)\). Equation (16) governs the beam axial deformation and is independent of the other two equations. Instead, the latter two equations are mutually coupled, but they can be rendered uncoupled by suitably changing the basic unknown variables of the problem.
For this purpose, let us introduce a new state variable, say \(\chi ^{EB}\), defined as
which is meant as the bending curvature pertinent to the bending moment M(x) in a strain-difference nonlocal shear-undeformable Euler-Bernoulli beam. After some algebra, Eqs. (17) and (18) can be replaced by
and
where the substitutions \(\beta = (b-a^2)\), \(\lambda ^2 = \frac{\mu S L^2 d}{E I}\) and \(C_1 = C - a B_2\) have been operated. It is important to note that, since \(\eta = \gamma ^{\prime }\), Eqs. (20) and (21) are mutually uncoupled integral equations for the unknown variables \(\chi ^{EB}\) and \(\eta \), respectively.
4 Strategy Solution of the Governing Beam’s Equations
Taking advantage from their linearity, Eqs. (16), (20) and (21) can be suitable solved by expressing the unknown functions e(x), \(\chi ^{EB}(x)\) and \(\eta (x)\) each as a linear combination of auxiliary unknown functions utilizing the same constants appearing on the r.h.s. of the governing integral equations.
Following this rationale, by posing the unknown stretching e(x) as combination of two auxiliary response functions \(e_0 (x) \) and \(e_1 (x) \)
the axial stretching Eq. (16) can be rewritten as
Since this equation must hold for arbitrary values of \(A_1\), then two mutually independent auxiliary integral equations are generated, that is,
where
It is important to note that the function \(e_0 (x) \) and \(e_1 (x) \), as solutions of Eq. (24), are independent of the beam’s boundary conditions.
Following the same rationale, the curvature \(\chi ^{EB}\) can be split as
that substituted in the bending Eq. (20) returns
where
Equations (27) are mutually independent equations, so that, also in this case, the auxiliary response functions \(\chi ^{EB}_0\), \(\chi ^{EB}_1\) and \(\chi ^{EB}_2\) can be uniquely determined independently of the beam boundary conditions.
Finally, applying again the procedure used before, the shear deformation equation given in (21) can be substituted with the auxiliary integral equations
where
in which the following positions hold true
Here, \(\eta _n (x)\) and \(g_n (x)\), (\(n=0, 1, 2\)), are mutually related by the integral equations
Equations (24) and (27) are Fredholm integral equations of the second kind with a symmetric, positive definite kernel, which are known to admit each a unique solution [9, 10]. Equations (29) exhibit a form more complex, however they are linear and possess several characteristics of a Fredholm integral equation of the second kind. Notably, the solutions of the above equations can be obtained by means of a routine numerical method, independently of the beam’s boundary conditions. In order to solve these equations, the same numerical procedure described in [3] and [8] has been used. In particular the utilized numerical algorithm is the Nystrom method reported by Press et al., pp. 782–785, [11]. The solution is obtained in the form of a linear equation system, whereby the main point is the choice of the quadrature points \(x_i,(i = 1, 2,\ldots ,N)\), along with the weights \(W_i\) (Gauss-Legendre quadrature rule).
Once Eqs. (24), (27) and (29) are solved and having in mind that \(e(x) = u^{\prime }(x)\), \(\chi ^{EB} = - \left( w^{EB}\right) ^{\prime \prime }(x)\) and \(\eta (x) =\gamma ^{\prime }(x)\), the axial displacement u(x), the transverse displacement \(w^{EB}(x)\) and the shear angle \(\gamma (x)\) can be calculated through the following equations
Eventually, recalling that \(\chi (x) = - w^{\prime \prime } (x)\), \(\chi ^{EB} (x) = - \left( w^{EB}\right) ^{\prime \prime } (x)\), and \(\eta (x)=\gamma ^{\prime }(x)\), after some algebra, the beam deflection w(x) can be given the shape
where
The eight constants \(A_1\), \(A_2\), \(B_1\), \(B_2\), \(B_3\), \(B_4\), \(C_1\), \(C_2\) appearing in the solving equations are evaluated by enforcing, for each particular beam case, specific boundary conditions.
4.1 Evaluation of the Stresses
Combining Eqs. (14) with Eq. (4)\(_1\) and noting that \(\chi (x)=\chi ^{EB}(x)- a\eta (x)\) and \(M(x)= EI{\mathcal J}[\chi ^{EB}](x)\), the normal stresses \(\sigma _{xx}\) can be written as:
Equation (39) can be regarded as a generalization of the Navier formula, the last addendum being the one related to the warping effects.
On the other hands, the shear stress \(\sigma _{xz}\) given by (4)\(_2\) can be rewritten as
The model of Eq. (40) predicts only the contribution to the shear stress proportional to the shear angle \(\gamma (x)\), indeed no shear strain is exhibited under pure bending conditions. To avoid this drawback, in analogy with the classical Euler-Bernoulli beam, (40) can be replaced with a shear stress, say \(\sigma _{xz}^{\mathrm {eql}}(x,z)\), in local equilibrium with the normal stress given by (39). After simple algebra we obtain
with X(z) denoting the first area moment of the rectangular cross section (\(B\times h\)) and
It is easy to show that (41) reduces to the Jourawski formula for \(\omega \rightarrow 0\); at a cross section where \(\gamma (x)=0\) it also loses the contribution from warping saving that related to the bending moment proportional to \(M^{\prime }(x)\).
5 Numerical Application and Conclusions
A cantilever beam under a point load P at the free end is considered. For such problem, we can write the boundary conditions in the form
Moreover, the equilibrium conditions write
By the boundary conditions (43)\(_3\) and (43)\(_4\), the constants \(B_1\) and \(B_2\) are determined as
while the boundary conditions (43)\(_1\), (43)\(_2\) and (43)\(_5\) give
Finally, from (43)\(_6\) we get
The numerical solution of Eqs. (31) and (33) allows to get the response functions \(\gamma (x)\) and w(x) given by Eqs. (39) and (40) respectively, after substitution of the above determined constants pertinent to the addressed beam case.

Cantilever beam under point load at the free end. Deflection ratio, \((3EIw(L)/PL^3)-1\), for fixed values of \(h/L=1\); \(E/\mu =10\) and \(\alpha =50\), plotted as function of the warping parameter \(\omega \) and different values of internal length, \(\ell /L\).

Cantilever beam under point load at the free end; Shear angle \(\gamma \) plotted as a function of x/L, for different values of the warping parameter \(\omega \), at a fixed value of the internal length \(\ell /L = 0.1\), \(h/L=1\); \(E/\mu =10\) and \(\alpha =50\).

Cantilever beam under point load at the free end. Stress diagrams at cross section plotted as a function of 2z/h, for different values of the warping parameter \(\omega \), at fixed values of the internal length \(\ell /L = 0.1\), slenderness ratio, \(h/L=1\) and for \(E/\mu =10\), \(\alpha =50\): (a) Normal stresses \(\sigma _{xx}\) at \(x=L\); (b) Shear stresses \(\sigma _{xz}\) (only contribution proportional to shear angle \(\gamma \)) at \(x=L\).
The response of the cantilever beam are reported in Figs. 1, 2, and 3(a–b). In particular, in Fig. (1) the maximum deflection ratio \(\left[ w(L)-w_0(L)\right] /w_0(L)\), where \(w_0(L)=PL^3/(3EI)\), is plotted as a function of the warping parameter \(\omega ,\,0\le \omega \le 40\), for fixed values \(h/L=1, E/\mu =10, \alpha =50\), but for different values of the internal length \(\ell /L=0; 0.05; 0.1; 0.15; 0.2\). The figure shows that the increasing of \(\omega \) causes some softening effect, which seems to be a natural consequence of the fact that \(\omega > 0\) means more deformation of the Euler-Bernoulli beam, but there is a notable stiffening effect with the increasing of \(\ell /L\). In Fig. 2, the quantity \(\mu S \gamma (x)/P\), proportional to the shear angle \(\gamma (x)\), is plotted as a function of x/L for different values of the warping parameter \(\omega = 0; 1; 2; 3; 5; 10\), and for fixed values \(\ell /L=0.1\); \(h/L=1\); \(E/\mu =10\) and \(\alpha =50\). Finally, in Fig. 3(a–b) are reported: the normal stress ratio \(\sigma _{xx}(x,z)/\sigma _0\) and the shear stress ratio \(\sigma _{xz}(x,z)/\mu \), respectively as a function of 2z/h at \(x= L\). \(\sigma _0=6PL/(Bh^2)\) is the maximum normal stress at \(x=0\) in the Euler-Bernoulli beam. It is worth noting that, remembering Eq. (39), the normal stress addend related to the warping effects (visible in the curves obtained for non-zero \(\omega \)) gives zero contribution to the stress resultants N(x) and M(x) at the cross section, as it has to be. Concerning the shear stresses it can be also observed that for \(\omega \) that tends to infinity the shear stresses are the ones predicted by Timoshenko beam model.
By the observation of the numerical results it may be concluded that within the framework of nonlocal elastic nanobeams shear deformation has a notable influence upon size effects and a correct description of their mechanical behavior cannot be disregarded.
References
Wang, Q., Arash, B.: A review on applications of carbon nanotubes and graphenes as nano-resonator sensors. Comput. Mater. Sci. 82, 350–360 (2014)
Polizzotto, C., Fuschi, P., Pisano, A.A.: A nonhomogeneous nonlocal elasticity model. Eur. J. Mech. A-Solids 25, 308–333 (2006)
Fuschi, P., Pisano, A.A., Polizzotto, C.: Size effects of small-scale beams addressed with a strain-difference based nonlocal elasticity theory. Int. J. Mech. Sci. 151, 661–671 (2019)
Reddy, J.N.: Nonlocal theories for bending, buckling and vibration of beams. Int. J. Eng. Sci. 45, 288–307 (2007)
Polizzotto, C.: From the Euler-Bernoulli beam to the Timoshenko one through a sequence of Reddy-type shear deformable beam models of increasing order. Eur. J. Mech. A-Solids 53, 62–74 (2015)
Challamel, N., Reddy, J.N., Wang, C.M.: Eringen’s stress gradient model for bending of nonlocal beams. J. Eng. Mech. 142 (2016). https://doi.org/10.1061/(ASCE)EM.1943-7889-0001161
Polizzotto, C.: A class of shear-deformable isotropic elastic plates with parametrically variable warping shapes. ZAMM J. Appl. Math. Mech. Zeitschrift fur angewandte Mathematik und Mechanik 98, 195–221 (2018)
Pisano, A.A., Fuschi, P., Polizzotto, C.: A strain-difference based nonlocal elasticity theory for small-scale shear-deformable beams with parametric warping. Int. J. Multiscale Comput. Eng. (2019). https://doi.org/10.1615/IntJMultCompEng.2019030885
Tricomi, F.G.: Integral Equations. Dover Books on Mathematics. Dover Publications, New York (1985)
Polyanin, A., Manzhirov, A.: Handbook of Integral Equations. CRC Press, New York (2008)
Press, V.H., Teukolsky, S.A., Vetterling, W.T., Flannery, B.P.: Numerical Recipes in Fortran 77: The Art of Scientific Computing, 2nd edn. Cambridge University Press, New York (1997)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Pisano, A.A., Fuschi, P., Polizzotto, C. (2020). Shear Effects in Elastic Nanobeams. In: Carcaterra, A., Paolone, A., Graziani, G. (eds) Proceedings of XXIV AIMETA Conference 2019. AIMETA 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-41057-5_68
Download citation
DOI: https://doi.org/10.1007/978-3-030-41057-5_68
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-41056-8
Online ISBN: 978-3-030-41057-5
eBook Packages: EngineeringEngineering (R0)