
Abstract
In order to research on the vibration and matching characteristics of typical wheel-rail profiles, a long-term experimental test on the line A and line B lasting one year was conducted to record the wheel wear. The wheel wear, worn distribution and wheelset conicity is investigated for one continuous reprofiling cycle on high-speed line A and B in the China. The simulation model of a high-speed train is established using the Simpack multi-body dynamics software package, and the simulation results agree very well with field test in time-domain. Typical results of simulation are illustrated for the vibration characteristics. The conicity of line A remains stable with the increase of operation distance, and the corresponding carbody and bogie frame vibration acceleration frequency is basically stable. The conicity of line B increases with the increase of operation distance, and the corresponding carbody and bogie frame vibration acceleration frequency is higher.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
With the rapid development of China’s high-speed railway, the operation mileage has exceeded 29,000 km, accounting for more than 70% of the world’s high-speed railway, and about 2800 units in service. The wheel-rail interface has main characteristics like as: continuous operation with high speed and long distance (300–350 km/h, 2300 km/per day), complicated environment (low temperature, ice and snow, sand and high wind, etc.). So, the wheel-rail interface of China is very complicated.
Wear phenomena due to wheel–rail interaction represent a critical aspect in railway applications; in fact the consequent evolution of rail and wheel profiles involves serious effects on both dynamical and stability characteristics of vehicles [1,2,3]. Profile changes lead also to higher maintenance cost, mainly concerned with the periodically re-profiling operations of wheels and the undesirable replacements of rails, necessary to re-establish the original profiles [4,5,6].
2 Measurement
For high-speed railway line A and line B, the same type of high-speed EMU of the running speed 250 km/h is operated, and the standard wheel profile has the same shape.
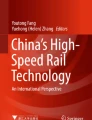
Figure 1 illustrates the wheel wear progression in one reprofiling cycle of line A, in which the profiles were measured every about 30,000 km. In this figure, the wheel wear increases with the increase of the operation distance, furthermore, the tread wear of the whole train is normal distribution when 210,000 km, the 0.5–0.6 mm accounts for the largest, reaching 53.85%, and the maximum wear is about 0.8 mm. The wheel wear has a large concentration range, mainly in the range of −35–50 mm on the abscissa. For the matching characteristics, the conicity in one continuous reprofiling cycle is stable at around 0.03, and there is no obvious change trend with the increase of wheel tread wear.

Wheel wear in one continuous reprofiling cycles on the line A.
Figure 2 illustrates the wheel wear progression in one reprofiling cycle of line B, in which the profiles were measured every about 30,000 km. In this figure, the wheel wear increases with the increase of the operation distance. At the time of 210,000 km, the tread wear of the whole train is normally distributed. The wear of 1.0–1.2 mm is the largest, reaching 50%; the wear of 0.8–1.0 mm is 32.81%, and the maximum wheel wear is about 1.6 mm. The central wear of the tread is concentrated in the range of −20–30 mm. For the matching characteristics, the conicity in one continuous reprofiling cycle increases with the increase of operation distance, and the average conicity is about 0.07 in the initial cycle, but the value is about 0.19 in the end cycle.

Wheel wear in one continuous reprofiling cycles on the line B.
3 Model and Validation
In this paper, the simulation model of high-speed passenger car is established using the Simpack multi-body dynamics software package. The vehicle model which is comprised of two bogie subsystems is modelled using a multi-body dynamics approach which fully takes into account the non-linear characters of wheel-rail contact, suspension parameters and buffer. The wheel-rail creep force is calculated by the Kalker nonlinear creep theory.
The simulation model of vehicle dynamics is composed of one car body, two bogie frames, four wheelsets and eight axleboxes. The model has a total of 50 degrees of freedom.
The acceleration of carbody and track geometry irregularities are measured using the sensors based a high-speed comprehensive test train on a representative line and the speed is 300 km/h. The rail profiles are measured using MINIPROF. The measured results of carbody acceleration, rail profile and track irregularities that have been undertaken to validate the dynamic simulation model of the vehicle (Fig. 3 and Table 1).

Vehicle simulation model.
Comparisons of simulation and carbody acceleration test results in the time domain and frequency domain represent an important part of model validation, as this is the best possibility to assess the validity of dynamic performance of the vehicle model.
Figures 4 and 5 show that the simulation results agree very well with field test in time-domain and frequency-domain, so the simulation model can be used to compute the dynamics of trains such as critical speed, ride index and wear index.

Simulation-measurement comparisons of lateral acceleration of carbody.

Simulation-measurement comparisons of vertical acceleration of carbody.
4 Preliminary Results
In order to research on the vibration characteristics of deferent wheel profile, the non-linear critical speed, ride index, lateral acceleration of carbody and bogie frame are analyzed.
Figure 6(a), the non-linear critical speed of line A and line B become lower with increasing train operation distance. The range of critical speed for line A is roughly from 420 km/h to 350 km/h, and line B is roughly from 460 km/h to 370 km/h. The critical speed of line B is about 10% more than line B.

The non-linear critical speed, ride index and lateral acceleration of bogie frame for the same EMU of line A and line B.
Figure 6(b), when the train operation distance is less than 50,000 km, the ride index of line A and line B is nearly equal. With the concave abrasion become greater, the ride index of line B increases relatively quickly. The ride index of line B is about 12% more than line A, as the train operation distance is over 21,000 km.
Figure 6(c), with increasing the train operation distance, the acceleration of the bogie frame for line A basically stays around 0.15. Clearly, the acceleration of the bogie frame for line B gradually grows when the train operation distance over 50,000 km, the value is about 50% more than line A as the train operation distance is over 21,000 km.
Figure 7 shows that the lateral acceleration frequency of bogie frame for the line A, with the increase of the operation distance, is basically stable. The lateral acceleration frequency of bogie frame for the line B gradually increases with the increase of the operation distance.

Lateral acceleration of the bogie frame in frequency-domain.
Through Fig. 8, the comparison of acceleration between line A and B in frequency-domain, we can see that the frequency of carbody and bogie frame for line B is obviously higher than the line A.

The comparison of acceleration between line A and B in frequency-domain.
5 Conclusions
-
(1)
For the high-speed line A, the wheel wear has a large concentration range, mainly in the range of −35–50 mm on the abscissa. The conicity and the frequency of the bogie frame in one continuous reprofiling cycle is stable, and there is no obvious change trend with the increase of wheel tread wear.
-
(2)
For the high-speed line B, the central wear of the tread is concentrated in the range of −20–30 mm. The conicity in one continuous reprofiling cycle increases with the increase of operation distance, and the average conicity is about 0.07 in the initial cycle, but the value is about 0.19 in the end cycle. Furthermore, the lateral acceleration frequency of bogie frame for the line B gradually increases with the increase of the operation distance.
-
(3)
Because of the conicity of the line B is higher than line A, the frequency of carbody and bogie frame for line B is obviously higher than the line A.
References
Sawley, K., Wu, H.: The formation of hollow-worn wheels and their effect on wheel/rail interaction. Wear 258(7–8), 1179–1186 (2005)
Polach, O.: Characteristic parameters of nonlinear wheel_rail contact geometry. Foreign Rolling Stock 48(Suppl. 1), 19–36 (2010)
Wu, H., Kalay, S., Tournay, H.: Development of the wheel-rail interface management model and its applications in heavy haul operations. Proc. Instit. Mech. Eng. Part F: J. Rail Rapid Transit 225(1), 38–47 (2011)
Karttunen, K., Kabo, E., Ekberg, A.: Numerical assessment of the influence of worn wheel thread geometry on rail and wheel deterioration. Wear 317(1–2), 77–91 (2014)
Huang, Z., Cui, D., Du, X., et al.: Influence of deviated wear of wheel on performance of hing-speed train running on straight tracks. J. Chin. Railway Soc. 35(2), 14–20 (2013)
Jin, X., Zhao, G., Liang, S., et al.: Characteristics, mechanisms, influences and counter measures of high speed wheel/rail wear: transverse wear of wheel tread. Chin. J. Mech. Eng. 54(4), 3–14 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Hou, M., Hu, X., Cheng, D., Li, L. (2020). Research on the Vibration and Matching Characteristics of the Typical Wheel-Rail Profiles of High-Speed Railway in China. In: Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A. (eds) Advances in Dynamics of Vehicles on Roads and Tracks. IAVSD 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-38077-9_92
Download citation
DOI: https://doi.org/10.1007/978-3-030-38077-9_92
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-38076-2
Online ISBN: 978-3-030-38077-9
eBook Packages: EngineeringEngineering (R0)