
Abstract
In order to explore the middle-speed adaptability of the rail beams including 25 m Changsha maglev simply-supported girder, the finite element dynamic analysis models for maglev rail beams was established firstly based on the finite element theory, of which the self-oscillation characteristics are analyzed. The dynamic model of middle-speed maglev train with 120 degrees of freedom is set up based on multi-body dynamics theory. Then the maglev train-bridge-controller coupled model is established considering the PID active suspension control as levitation force. Based on the vehicle-bridge-controller coupled model, the vibration responses of the vehicle-bridge system are further studied at middle speed with track beams which are taken as the structure under the rail. The simulation speed ranges from 100 km/h to 180 km/h. Then the vertical vibration responses of bridge and car body are calculated and analyzed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
As a new form of rail transit, maglev traffic can directly avoid mechanical contact between vehicle and track subsystems owing to its special structural characteristics, with the advantages of small turning radius, high climbing ability, low running noise and so on [1]. It is expected to have a broad application prospect in China.
The medium-low speed maglev railway system is a complex system, which includes vehicle system, track structure system and electromagnetic control system. Therefore, the appropriate and accurate coupling simulation model is the basis for the dynamic research of medium-low speed maglev traffic [2]. However, many scholars take the electromagnetic control system as spring element with linear stiffness in simulation model [3, 4]. In this paper, the coupling dynamic model of middle-low speed maglev vehicle-bridge-controller system is established, which is more accurate and effective. Then the typical dynamic responses of maglev vehicles and bridges are analyzed, in hope to provide a reference basis for the design and optimization of the maglev track beam and vehicle dynamic parameters later.
2 Dynamic Modeling of Middle-Low Speed Maglev Vehicle-Bridge-Controller System
2.1 Maglev Vehicle and Track Structure Subsystem
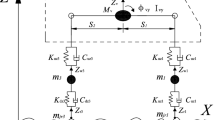
The medium-low speed maglev vehicle system is mainly composed of car body and suspension chassis. Each car body usually contains 3–5 suspension chassis, which are symmetrical distributed below the car body. The suspension chassis mainly includes the suspension side frame, electromagnet, anti-lateral rolling beam, secondary system suspension, transverse slide table, traction rod and the forced guidance mechanism, etc. Each element is interacted by reasonable motion joint, constraint and force element to reflect the relationship and mechanical transfer characteristics [5].
Taking the 25 m span Changsha maglev simply-supported girder as the research object, the spatial model of the maglev track beams with three spans is established by ANSYS (see Fig. 1). The element of beam, F-rail and H-type steel pillow are all simulated by the beam element. The F rail is connected with H-type steel pillow through the rigid arm, and the fastener is simplified as spring unit with multi-direction stiffness.

Finite element model of track beam of Changsha airport maglev line
Based on the finite element model of the track beam, the modal analysis of the track beam is carried out. The results are shown in Table 1.
2.2 The Coupled Dynamic Model of Middle-Low Speed Maglev System
Based on the multi-body dynamics software SIMPACK and the finite element software ANSYS, the dynamic model of middle-speed maglev vehicle and the finite element model of the track simple beam are set up respectively. The coupling model of the maglev vehicle-bridge-controller is set up with the PID control system based on the full feedback of the position, velocity and acceleration as the full feedback.
The maglev track beam is introduced into the dynamic model of the maglev vehicle in the form of flexible body for realizing the coupling calculation of vehicle and bridge. The FlexModal module is the finite element model interface module of SIMPACK, which can realize the co-simulation with finite element analysis software. The result of substructure and modal analysis of the track beam model can be used to generate the corresponding standard files (.fbi file) through the method of DOFs reduction. The displacement deformation of the flexible track beam is calculated by the modal superposition method.
The controller model is established with MATLAB/Simulink based on electromagnetic theory and PID feedback. It can be converted to the controller model into .dll file, which can be imported into the multi-body dynamics simulation environment through the MATSIM module in SIMPACK for realizing the vehicle-bridge-controller coupled model (see Fig. 2).

The coupled dynamic model of middle-low speed maglev system: (a) flowchart of co-simulation, (b) coupled simulation model.
3 Simulation and Dynamic Responses Analysis
By using the middle-low speed maglev vehicle-bridge-controller coupled dynamic model, the typical dynamic responses of 25 m span Changsha maglev simply-supported girder, vehicle and electromagnetic control system are simulated and analyzed with operation speed at 100 km/h, as shown in Fig. 3.

The typical dynamic responses of middle-low speed maglev system: (a) vertical acceleration of mid-span of bridge, (b) displacement of mid-span of bridge, (c) suspending gap of electromagnetic control system, (d) acceleration of car body.
The following figure shows the curve of the vibration response of bridge and car body varying with speed, including of the vertical displacement and acceleration of mid-span of bridge and the vertical acceleration of car-body (see in Figs. 4, 5 and 6). The calculation results show that the waveform diagram of the typical responses in time domain can reflect the actual situation well and is in good agreement with the test data of relevant report.

Maximum variation curve of vertical displacement in bridge span

Maximum variation curve of vertical acceleration in bridge span

Maximum acceleration curve of vehicle vertical vibration
From the above chart, the maximum vertical displacement of the bridge at the middle span of simply supported beam is 4.350 mm; the maximum vertical acceleration of the bridge at the middle span of simply supported beam is 0.95 m/s2. And the vertical displacement and acceleration of bridge at each span increases slightly with the increase of the speed of maglev vehicle, and the maximum value occurs at the speed of 180 km/h. As for the vibration response of the car body, the vibration of the middle car is larger than that of the front and rear car.
4 Conclusions
The medium-speed adaptability of 25 m span Changsha simply-supported girder is studied. Based on the multi-body dynamics software SIMPACK, finite element software ANSYS and MATLAB/Simulink, a medium-speed maglev vehicle-bridge-controller coupled model is established, and the dynamic responses of the system are calculated and analyzed.
The main conclusions are can be drawn that Changsha maglev simply-supported girder has good adaptability to medium speed as the structural foundation under F-rail. The vertical displacement and acceleration of bridge at mid-span and car body increases with the increase of the speed of maglev vehicle.
References
Wu, X.M.: Maglev Train. Shanghai Scientific and Technical Publishers, Shanghai (2003)
Zhai, W.M., Wang, K.Y., Cai, C.B.: Fundamental of vehicle-track coupled dynamics. Veh. Syst. Dyn. 47(11), 1349–1376 (2009)
Li, X.Z., Hong, Q.Y., Geng, J., et al.: The medium and low speed maglev train-track beam coupling vibration model and vibration. J. Railway Eng. Soc. (9), 103–108 (2015)
Zhao, C.F.: Maglev vehicle system dynamics. Doctoral dissertation, Southwest Jiaotong University (2002)
Jiang, W.L., Gao, M.M.: Study of the effect of track beam parameters on vertical coupled dynamic response of maglev vehicle-viaduct. China Railway Sci. 25(3), 71–75 (2004)
Acknowledgements
This work was supported by the Sichuan Science and Technology Program (Grant No. 2018GZ0056) and National Key Research and Development Program of China (Grant No. 2016YFB1200600).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Chen, Z., Yin, J., Yang, J., Feng, D. (2020). Dynamic Modeling and Coupled Vibration Analysis of Middle-Low Speed Maglev Vehicle-Bridge-Controller System. In: Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A. (eds) Advances in Dynamics of Vehicles on Roads and Tracks. IAVSD 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-38077-9_107
Download citation
DOI: https://doi.org/10.1007/978-3-030-38077-9_107
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-38076-2
Online ISBN: 978-3-030-38077-9
eBook Packages: EngineeringEngineering (R0)