
Abstract
The CTU roller rig is 1:3.5 scaled test rig that serves mainly as a tool for experimental verification of mathematical simulations and demonstration of the possible benefits of using active controlled elements in railway bogies. Currently it is involved in the development of a system of active wheelset steering for an electric locomotive. The goal of this system is to reduce forces in the contact of wheels and rails in a curved track. This project necessitated the further development of the CTU roller rig, particularly needed were the capability to apply the centrifugal force on the test bogie, and the capability to measure forces in the wheel-roller contacts and forces transmitted between the bogie-frame and axle-boxes. These requirements led to the design of a new rig mainframe that tilts around the longitudinal axis and instrumentation of the rollers and test bogie components by strain gauge bridges.
The systems of measuring the forces in the wheel-roller contacts and the axle-box forces have been calibrated, implemented on the rollers and the experimental bogie and successfully tested. The new roller rig mainframe and components of the tilting mechanism are currently in the production. The paper describes in detail recent design changes of CTU roller rig, their implementation and testing.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Roller rigs have been used world-wide to research into the dynamics of railway vehicles [1,2,3]. These rigs have been proved as useful devices especially for basic research, for validation of new theories [4, 5] and verification results of computer simulations, for development of innovative designs and the optimization of vehicle components [6,7,8,9,10].
The roller rig at the Czech Technical University (CTU roller rig) [11, 12] is 1:3.5 scaled. Recently, the CTU roller rig has been equipped with the new experimental 2-axle bogie [13] (see Fig. 1).

Test bogie equipped with traction wheelsets on the CTU roller rig (left), IRW wheelsets during drives tests
The CTU roller rig serves mainly as a tool for experimental verification of mathematical simulations and demonstration of the possible benefits of using active controlled elements in railway bogies. The experimental bogie consists of several kits and can be easily configured according the goals of experiments. The key bogie kits are:
-
Active wheelset steering – the bogie is equipped with an actuated wheelset steering mechanism. The actuators are a permanent magnet synchronous servomotors. The mechanism could be controlled to the desired yaw angle of each wheelset towards the bogie frame or to the desired yaw torque acting upon a wheelset.
-
Conventional wheelsets – conventional wheelsets are equipped with asynchronous traction drives (see Fig. 1, left). Either speed or torque of drives is controlled. The wheel profiles with different taper grade in range from 1/40 to 1/5 are available.
-
IRW wheelsets – IRW wheelsets are equipped with wheel traction drives consisting of permanent magnet synchronous servomotor and belt drive (see Fig. 1, right). Speed or torque of each wheel could be independently controlled.
2 Motivation
Currently, a system of active wheelset steering for an electric locomotive is being developed at the CTU in cooperation with an industrial partner. The goal of this system is to reduce guiding forces in the contact of wheels and rails during negotiation of a curved track. Before testing this system on a vehicle the roller rig tests are planned. The goal is to test the system in various operating situations in respect with track curve radius, vehicle sped, uncompensated lateral acceleration and failure modes and evaluate its’ contribution to the guiding forces reduction and running safety.
The CTU roller rig is capable of simulating of vehicle running in a curved track, but only under the assumption of complete compensation of the centrifugal force by superelevation of rails. However, this assumption is usually not fully met in the practice. Hence the goal of the further development of the CTU roller rig was in particular:
-
simulation of the effects of centrifugal force,
-
measurement of the forces in the wheel-rail contact and forces transmitted between the bogie-frame and axle-boxes (so-called axle-box forces).
3 Centrifugal Forces Simulation
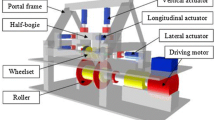
After considering possible solutions, it was decided to simulate the effects of centrifugal force by means of a tilting of the whole device along its longitudinal axis. Therefore, a completely new mainframe was designed (see Fig. 2). The frame is placed on the four rollers. Its tilting is ensured by means of a servomotor, a worm gearbox, levers and linkages. The lateral force that represents uncompensated centrifugal force is proportional to the tilt angle of the mainframe.

The design of the CTU roller rig mainframe
4 Wheel-Rail Forces Measurement
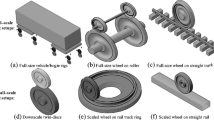
An important research tool in experimental testing of rail vehicles are strain gauge instrumented wheelsets, where the forces acting in the wheel-rail contacts are estimated by measurement of radial strains of wheel discs. In the case of the CTU roller rig a similar approach is used. Because the wheelsets of the experimental bogie are not applicable due to the small diameter and very high stiffness of the wheel disc, the system of measurement of disc strains was applied on the rollers (see Fig. 3).

Placement and connection of strain gauges
This approach exhibits very good properties in terms of measuring the lateral component of wheel-rail contact forces. Its disadvantages are especially low sensitivity for measurement of vertical and longitudinal components of wheel-rail contact forces and the necessity to transmit the output signal from rotating parts.
At the CTU roller rig, several industrial signal transmission systems were tested (see Fig. 4). Finally, the new rollers with optimized disc shape have been designed and manufactured and in-house wireless signal transmission system has been developed (see Fig. 5). The signal transmission system provides time synchronized wireless 24 bit data transfer from all four rollers in a sampling rate of 1 kHz. The signals are synchronized with the signals of other sensors and processed by National Instruments cRIO hardware [15]. The development of the wireless data transfer system was conducted in cooperation with the Faculty of Biomedical Engineering, CTU in Prague.

Roller equipped with two systems of wireless data transfer during tests

Instrumented roller (left), transmitter and receiver of data transmission system (right)
5 Axle-Box Forces Measurement
The possibility to measure wheel-rail contact forces was also considered in the design of the experimental bogie. In this case the contact forces are estimated by measurement of axle-box forces, i.e. forces transmitted between axle-boxes and the bogie frame. Information on the magnitude of axle-box forces are not regarded as an adequate substitute for information about the value of wheel-rail contact forces. They differ due to the inertia of wheelset. Moreover, the distribution of wheel-rail contact forces between the right and left wheel could not be determined by measurement of axle-box forces. The advantage of the measurement of axle-box forces is its easy realization without the necessity to transmit a signal from rotating parts. Considering several possible solutions, the development of specific component of the wheelset guidance acting as a 3-axis load cell was chosen. All forces between each axle-box and bogie frame are transmitted via a stirrup (see Fig. 6), that is optimized for the strain gauge placement.

Load cell for axle-box forces measurement
Each stirrup is instrumented with 36 strain gauges in three full bridges (see Fig. 7). The wiring of strain gauges ensures the measurement of longitudinal Fx, lateral Fy and vertical Fz component of axle-box force independently of each other. The parasitic resistive forces FR1, FR2 and torques MR1, MR2 in the connection of the stirrup and the bogie frame are eliminated from the measured signal [14].

Instrumented stirrup
6 Measurement of Bogie Tractive Effort
The bogie is connected to the roller rig main frame using a Watt’s mechanism (Fig. 8). The arm “1” is connected to the roller rig mainframe by a pair of ball-bearings and rotates around vertical pivot in its’ centre. The bogie is connected to the arm “1” by two short linkages “2”.

The mechanism of connection between the bogie and the rig mainframe
Thus the bogie is longitudinally fixed with respect to the roller rig mainframe, whereas it can move in lateral and yaw direction without restrictions. The linkages “2” are instrumented with industrial single axis force transducer HBM U9B (Fig. 9) which measures tensile and compressive forces in the range of 1 kN. The sum of the forces in the linkages “2” represents the total tractive effort of the bogie.

Detailed photo of instrumented linkage
7 Conclusions
The CTU roller rig serves as an experimental tool in a project of development of active steering mechanism for an electric locomotive. For this purpose, systems for measuring wheel-rail contact forces have been improved and design changes of the roller rig mainframe have been proposed. The systems of measuring the forces in the wheel-roller contacts, the axle-box forces and bogie tractive effort have been calibrated, implemented on the rollers and the experimental bogie and successfully tested. The new roller rig mainframe and components of the rig tilting are currently in the production. The final assembly is scheduled to the summer 2019. The recent design changes provide the applicability of the CTU roller rig for verifying the contribution of the active wheelset steering system on reduction of wheel-rail contact forces in a curved track of an arbitrary radius with an arbitrary uncompensated lateral acceleration.
References
Jaschinski, A., Chollet, H., Iwnicki, S.D., Wickens, A.H.: The application of roller rigs to railway vehicle dynamics. Veh. Syst. Dyn. 31(5–6), 345–392 (1999)
Iwnicki, S. (ed.): Handbook of Railway Vehicle Dynamics. Taylor and Francis, Boca Raton (2006). Chap. 14. Roller Rigs
Myamlin, S., Kalivoda, J., Neduzha, L.: Testing of railway vehicles using roller rigs. Procedia Eng. 187, 688–695 (2017)
Bosso, N., Gugliotta, A., Magelli, M., Zampieri, N.: Experimental setup of an innovative multi-axle roller rig for the investigation of the adhesion recovery phenomenon. Exp. Tech. (2019). https://doi.org/10.1007/s40799-019-00327-x
Meymand, S.Z., Ahmadian, M.: Design, development, and calibration of a force-moment measurement system for wheel-rail contact, mechanics in roller rigs. Measurement 81, 113–122 (2016)
Bosso, N., Gugliotta, A., Somà, A.: Simulation of narrow gauge railway vehicles and experimental validation by mean of scaled tests on roller rig. Meccanica 43, 211–223 (2008)
Hur, H.-M., Park, J.-H., You, W.-H., Park, T.-W.: A study on the critical speed of worn wheel profile using a scale model. J. Mech. Sci. Technol. 23(10), 2790–2800 (2009)
Ejiri, K., Michitsuji, Y., Suda, Y., Lin, S., Sugiyama, H.: Running stability analysis of independently rotating wheelset with negative tread conicity using scaled-model roller rig. In: Zhang, W., Gong, M. (eds.) 23rd International Symposium on Dynamics of Vehicles on Roads and Tracks, Qingdao (2013)
Michitsuji, Y., Suda, Y.: Running performance of power-steering railway bogie with independently rotating wheels. Veh. Syst. Dyn. 44(1), 71–82 (2006)
Kurzeck, B., Valente, L.: A novel mechatronic running gear: concept, simulation and scaled roller rig testing. In: 9th World Congress on Railway, Research, Lille (2011)
Kalivoda, J., Bauer, P.: Development of the roller rig and the experimental bogie for research of the running behaviour of actively controlled railway running gears. In: Michalkova (ed.) 23rd International Conference on Current Problems in Rail Vehicles, pp. 181–188, Ceska Trebova (2017)
Kalivoda, J., Bauer, P.: Scaled roller rig experiments with a mechatronic bogie. In: Proceedings of the Second International Conference on Railway Technology: Research, Development and Maintenance, Ajaccio. Civil-Comp Press (2014)
Kalivoda, J., Bauer, P.: Mechatronic bogie for roller rig tests. In: Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics (IAVSD 2015), Graz, Austria. CRC Press (2016)
Bauer, P., Kalivoda, J.: System of axle-box force measurement for experimental railway bogie. In: EAN 2018 56th Conference on Experimental Stress Analysis, Conference Proceedings, pp. 9–16. Česká společnost pro mechaniku, Praha (2018)
Kalivoda, J., Bauer, P.: Measurement of wheel-rail contact forces at the experimental roller rig. In: EAN 2019 57th Conference on Experimental Stress Analysis, Conference Proceedings, pp. 194–201. Česká společnost pro mechaniku, Praha (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Kalivoda, J., Bauer, P. (2020). Scaled Roller Rig to Assess the Influence of Active Wheelset Steering on Wheel-Rail Contact Forces. In: Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A. (eds) Advances in Dynamics of Vehicles on Roads and Tracks. IAVSD 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-38077-9_10
Download citation
DOI: https://doi.org/10.1007/978-3-030-38077-9_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-38076-2
Online ISBN: 978-3-030-38077-9
eBook Packages: EngineeringEngineering (R0)