
Abstract
The article presents the concept of implementing subsequent phases of services for the C-ITS system (the Cooperative Intelligent Transport Systems), based on the European Parliament resolution of March 2018. Next, the 5G systems, in the context of their possible cooperation with C-ITS systems, were discussed. Numerical propagation analysis was performed for V2V and V2I type communication based on two different propagation models. Also, rules for the placement of sensors enabling the efficient implementation of data transmission between vehicles and infrastructure were proposed. Next, on the basis of the performed range and interference analysis, the distance between vehicles was estimated at which they could establish communication. It is of vital practical importance as the correct arrangement of the sensors will have a significant impact on the safety of road traffic participants.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Nowadays, the rapid development of the transport systems we are observing. Concepts of new, alternative solutions appear, such as, for example, autonomous vehicles or the use of drones for transporting merchandise and even people. Therefore, safety in transport systems takes on a completely new meaning. That is why we need to look for new, global solutions to improve already bad accident statistics.
On the one hand, a chance gives us the prospect of implementing 5G systems in the near future, in which data transmission will take place, to a large extent, without human participation, and even beyond its awareness. On the other hand, the Cooperative Intelligent Transport System C-ITS seems to be a chance to be implemented in the European Union. It is a system that was created as a response to the Amsterdam declaration, which was signed by the European transport ministers on 12 April 2016 [1].
The combination of these two solutions (5G and C-ITS) opens up new perspectives. The chances of implementing both solutions in practice are very large. First of all, cellular network operators will certainly not let go of the 5G system implementation, because it is a very real prospect of earnings. And the second implementation of the C-ITS system has become a fact because in March 2018 the European Parliament’s resolution on the implementation of the Cooperative Intelligent Transport System was officially adopted [1]. The publication of this resolution is the result of many years of commission work that prepared European Parliament recommendations for such a system, based on the results of a variety of research and development work and a big step forward [2, 3]. The proposed C-ITS solutions envisage the possibility of using 5G systems in the future in order to improve travel comfort and safety [4].
2 Concept of C-ITS
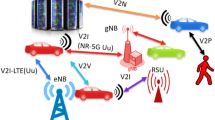
The C-ITS system is in principle to improve the safety of all road users. Therefore, standards must be developed that will enable the transmission of signals in such a way as to ensure immediate short-range communication, between vehicles (i.e., basically implementing Vehicle to Vehicle - V2V communication), vehicles and infrastructure (i.e., implementing Vehicle to Infrastructure - V2I) and public transport.
It should be emphasized that the European Parliament wants to quickly implement at least the basic services provided for C-ITS [1] – discussion about this topic will appear in the next paragraph. There is a need to rapidly reduce the number of road deaths and increase the safety of autonomous vehicles appearing on the roads and their full integration into the entire transport system [5]. Work on C-ITS has been ongoing since November 2014 [2], when the European Commission launched the C-ITS platform [2] to identify problems. The work of experts has shown that the basic problem that needs to be addressed already at the planning stage C-ITS is to develop an appropriate communication standard. It was found that the proposed solution should enable the implementation of a very broad and at the same time flexible scope of services, taking into account that the exchange of information will be made up of cars and trucks, autonomous vehicles, public transport vehicles, but also elements of road infrastructure and pedestrian road terminals. Also, it was agreed that data transmission would have to be carried out by many different entities in Europe, in places covered by the range of different cellular systems [3]. Therefore, the use of so-called C-ITS [2, 3] has been proposed as a consensus.
Hybrid communication that will enable the use of various communication technologies that complement each other. Also, according to the documentation [3], the developed solutions should include the non-collision implementation of 5G systems and satellite communications. It was assumed that all messages in C-ITS would be sent transparently, i.e., one that does not require the recognition of communication technology. Currently, it seems that the best chance to meet the set criteria will be hybrid communication based on the combination of the ETSI ITS-G5 (IEEE 802.11p) standard [6] with the standards of local cellular networks. In the future, it will be possible to implement 5G systems efficiently [4]. Thanks to such integration, data will be sent with slight delays [4], while maintaining the ability to operate vehicles located close to each other [3]. Data transmission (in very large quantities) is expected to use the 5.9 GHz frequency band [2, 3] as a band reserved for security systems by the decision of the European Commission (2008/671/EC).
3 Services in C-ITS
As a result of the work of experts gathered around the platform, priorities were adopted in the order of implementation of C-ITS services, which are discussed below [3].
The most important recommendations include the recommendation to maintain the continuity of services, i.e., to ensure that all users in the European Union can use all services offered by C-ITS. It applies both to services that will be implemented on the infrastructure side as well as on the side of the vehicle, i.e., in the variants of the V2V and V2I systems. Already at the stage of the first standardization works, it was pointed out that the implementation of a new, intelligent transport system requires consideration of all problems at the level of horizontal layers, for different industry layers, different types of transport, and not vertical categories such as telecommunications, transport or IT systems. In addition to creating new services, it is necessary to analyze current data, static data and, for example, digital maps [7].
According to the communique of the Committee to the European Parliament, the Council of the European Economic and Social Committee and the Committee of the Regions, the first group of services (being the earliest implemented) of C-ITS are services related to broadly understood notification of the dangerous location of vehicles, compared to other vehicles moving in front of us. It can be, i.e., warning about vehicles in front of us, in particular, information about vehicles moving slowly or standing on the road. Also, drivers are to be informed about ongoing road works and warned about bad weather conditions, which is important, for example, if we remember about last year’s collision of a huge number of cars that bumped into each other suddenly entering the fog. Also, the drivers will be informed of oncoming privileged vehicles, especially those left behind the corner, as well as the emergency braking lights. These services are to be implemented as early as in 2019 [3].
In order to implement this first group of services, as shown in [3], it is necessary to perform some changes in a vehicle. Firstly, to install various sensors that will be able to receive the required warning signals from sensors placed in the vehicle engine or tires, and also, devices that give signals about, e.g., the need to provide a green wave and many more.
The second group of services is known as Phase 1.5, i.e., those for which it was assumed that they might not be implemented on a large scale in 2019, due to the lack of full specification or standard. These include, in particular, services related to our comfort of moving around the city, e.g., providing traffic information and intelligent routing, parking support (parking management on and off the street), but also vehicle fleet navigation, intelligent, controlled signaling light. Besides, this group of services will include publicly available information on alternative fuel charging stations, which are currently relatively small [3].
In the further part of the article, a propagation and interference analysis for the C-ITS system based on the 5G system will be carried out.
4 Propagation Model for V2I Communication
In the case when we are considering V2I type communication, in which there is an exchange of information between sensors located in the vehicle and those located on road infrastructure, we can use the WINNER II model to estimate the propagation loss [8]. It is a model that can be used for frequencies in the range from 2 to 6 GHz, so it covers the range of 5G work band.
In this model, we have defined various dependencies to estimate propagation losses in various propagation environments. These dependencies take into account both the case of communication with direct visibility of antennas (transmitting and receiving) (LOS), as well as the case when we do not have such a direct line of sight (NLOS) [8].
The basic dependence modeling propagation loss is as follows
where: d[m] – distance between the transmitter and the receiver; f[GHz] – signal frequency; A, B, C – constants whose values are defined for different propagation environments; X – parameter, which is defined for specific propagation environments, e.g. it may be related to the width of streets in an urban environment [8].
Various scenarios for the Winner model have been defined in [8]. A few examples (important for our analysis) are shown in the Table 1. As we can see, the Winner II model is suitable for estimating propagation loss for all environments relevant to Intelligent Transport Systems. It takes into account both the difficult urban environment, as well as the suburban environment. In an urban environment, there is a lot of buildings. In the suburban, there are much fewer buildings, and the speed of vehicles is higher. It is important from the point of view of phenomena that occur in the radio communication channel.
In order to further analyze the propagation losses for various radio link parameters, a suitable model for environment B1 was selected. In this environment, according to the WINNER II model, it is assumed that mobile terminal antennas are placed at the height of 1.5 m, and antennas correlated with road infrastructure can be suspended at the height of 5 m to 20 m [8].
In the first step, a case in which the transmitting and receiving antennas remain in the line of direct sight (LOS) will be considered. Then the propagation loss can be represented by the formula
for the distance d1 (which is defined as we can see on Fig. 1) is in the range 10 m up to the \( d{}_{BP}^{{\prime }} \) \( (10[m] < d_{1} [m] < d_{BP}^{{\prime }} [m]) \), where \( d{}_{BP}^{{\prime }} \) is a breakpoint defined as
where \( h{}_{Tx}^{{\prime }} [m] \) – effective height of the base station antenna (transmitter antenna), \( (h{}_{Tx}^{{\prime }} [m] = h_{Tx} [m] - 1[m]) \), \( h{}_{Rx}^{{\prime }} [m] \) – effective height of the mobile station antenna (receiver antenna), \( (h{}_{Rx}^{{\prime }} [m] = h_{Rx} [m] - 1[m]) \). Also \( h_{Tx.} \left[ {\text{m}} \right] \) is a real height base station antenna and \( h_{Rx} \left[ {\text{m}} \right] \) is a real height mobile station antenna, f[GHz] is a signal frequency and c – propagation velocity in free space [8].

Geometrical model for communication V2I and transmission LOS and NLOS – model WINNER II [own study based on 8]
If the distance d1 is in the range \( d{}_{BP}^{{\prime }} \) up to 5 km \( (d_{BP}^{{\prime }} [m]\, <\, d_{1} [m]\, < \, 5000[m]) \) propagation loss must be calculated [8] with the formula:
In Fig. 2 presented the result of calculations of numerical propagation losses (Lprop,LOS) for LOS conditions and frequency 6 GHz, hRx = 1.5 m, hTx = 10 m. The results were obtained, using the WINNER model, for B1 environment and different values of distance d = d1. As we can see if the distance d increases, the value of propagation losses also increases.

Propagation loss for V2I communication and LOS condition – WINNER II model [own study]
In the second step, the case is considered in which the transmitting and receiving antennas are not in the direct line of sight (NLOS) [8].
Then the propagation loss can be calculated using the equation:
where \( L_{prop,LOS} \left( {d_{1} } \right) \) - radio signal propagation loss in the distance d1 in condition LOS, d1[m] – the distance between intersection and infrastructure (look Fig. 1), \( n_{j} = \hbox{max} (2,8 - 0,0024d_{1} ,1,84) \), d2[m] – the distance between vehicle and intersection (see Fig. 1), f [GHz] – signal frequency.
This equation is valid for distance d1 between 10 m and 5 km \( (10[m]\, < \, d_{1} [m]\, < \, 5[km]) \) and W = 20 m (see Fig. 1), hRx = 10 m, hTx = 1.5 m. However when \( 0\, < \, d_{1} [m] \, < \, w/2 \) the pattern is used scenarios for LOS [8].
In Fig. 3 the result of calculations of numerical propagation losses (Lprop,LOS) for NLOS conditions for frequency 6 GHz, hTx = 10 m, hRx = 1.5 m, Ws = 20 m and different values of d1 was presented. As we can see with increased distance, d1 propagation loss was increased. So when designing the C-ITS network, remember that the further the infrastructure element will be set from the intersection, the more difficult it will be to select the other radio link elements and their parameters (i.e., antennas with appropriate profits, transmitted signal power or fiders) to obtain sufficient range.

Propagation loss for V2I communication and NLOS condition – WINNER II model [own study]
5 Propagation Model for V2V Communication
In the case when we are considering V2V type communication, in which there is an exchange of information between sensors located in the vehicles, we can use the University Kangaku model to estimate the propagation loss. It is a model that can be used for frequencies in the range from 400 MHz to 6 GHz [9].
The formula gives propagation loss for the LOS condition:
where \( h_{Tx} [m] \) – height of the base station antenna (transmitter antenna), \( h_{Rx} [m] \) – height of the mobile station antenna (receiver antenna), λ - wavelength, dC – a critical distance which must be calculated with the formula \( d_{c} [m] = \frac{{8h_{Tx} h_{Rx} f}}{c} \), Ws – is the street width [9].
The geometry of NLOS transmission (and definition W1 and W2) we have shown in the Fig. 4. The formula gives propagation loss for NLOS transmission:
where dNLOS = d1+ d2 – the distance between the transmitter and the receiver for the situation NLOS [m], and \( d_{B} [m] = \frac{{4h_{Tx} h_{Rx} f}}{c} \) [9].

Geometrical model for communication V2V and transmission NLOS – model University Kangaku [own study based on 9]
In Fig. 5 the result of calculations of numerical propagation losses (Lprop,LOS) for NLOS for communication V2V is presented.

Propagation loss for V2V communication and NLOS condition – University Kangaku model [own study]
The numerical analysis shows that the increase in the distance between the vehicle and the intersection increases the attenuation of the radio signal. The vehicle is further away from the intersection, and the more obstacles lie on the direct path between them and hence the increase in attenuation. For both models presented, signal attenuation increased with increasing distance from the intersection. It means that for both the LOS and NLOS cases, V2V and V2X signal transmissions, we must try to ensure the smallest distance between the sensors (and/or vehicles). And in case we want vehicles to be able to establish communication from a greater distance, we must provide more signal power.
6 Model to the Interference Analysis in C-ITS
Signal transmission for V2X communication in the C-ITS system, using 5G technology, can in principle be implemented in different modes. The mode of transmission will depend, among others from what kind of services will be implemented. In Table 2 shows how ETSI [10] in the document of November 2018 divided the frequency band to carry out various services.
In principle, we can provide users with data in anycast, unicast, multicast and broadcast modes. The first type of transmission means that one sender sends data to multiple recipients, but in general, the data is received first by one of them - usually the nearest one or the one for whom the connection quality is the highest. With unicast transmission, signals are sent between one sender and one recipient. In multicast mode, the transmission is carried out by one sender to many recipients treated as a certain group, thus in such a way as if the recipient was a group. And in broadcast mode, we send signals to many users from a single point. From the point of view of the C-ITS system, the most important seems to be the unicast type of transmission, in which there will be a signal exchange between, for example, two cars in proximity and broadcast transmission, because we will send, for example, messages about serious incidents to all road users within reach of the network.
Interference analysis for 5G systems in the context of C-ITS system implementation requires consideration of a non-orthogonal method of multiple access to physical resources, called NOMA - Non-Orthogonal Multiple Access. In general, the NOMA method can be divided into the NOMA method with multiplexing in the power domain and the code domain. It raises some doubts whether this classification is fully separable, but so far no better source exists. As with DS CDMA systems, all available physical, time and/or frequency resources are used for each user [11,12,13].
As reported in [11] for C-ITS, the following scenarios should be considered:
-
NOMA for unicast type V2X transmissions,
-
NOMA for broadcast V2X broadcasts,
-
NOMA for the uplink and V2I transmission
-
NOMA for V2V transmission including many operators.
In general, in the NOMA method, signals can be transmitted in the same full frequency channel to two vehicles with different powers. As shown in Fig. 5, in the case of OFDM (i.e., OMA methods), signals are also transmitted in the same channel, but there is a clear separation of subcarriers - i.e., a signal to one user is transmitted on a certain group of subcarriers, and to another on other subcarriers [13, 14].
The model to calculation interference and the method of transmitting signals with the NOMA technique assuming that the base station sends signals to two vehicles marked as A and B is presented in Fig. 6. The signal received at receivers of individual vehicles of user A and B will be a superposition of useful signals intended for a given user and signals constituting internal interference intended for the second user.

Example of transmitting NOMA type signals for two vehicles with communication V2X [own study based on 11]
Thus, the separation of signals intended for both vehicles must be implemented at the mobile station side, so that each of them can receive the signal sent to it, reduce interference signals and at the same time decode its data properly. It is possible with the use of nonlinear receivers and the use of appropriate SIC (Successive Interference Canceller) algorithms that will allow isolating the signal appropriate for a given user [13].
In order to perform a mathematical analysis of the NOMA method, which will be implemented in C-ITS systems, let us assume that the base station sends a signal si the mean value of the square module \( E[\left| {s_{i}^{2} } \right|] \) is 1, with the total power pi, for simplicity up to two vehicles A and B (as shown in Fig. 7) [13]. Also, we assume that the transmission of signals takes place in a radio link with a single transmit antenna and a single receiving antenna.

NOMA in the downlink for V2X transmission [own study based on 13]
When using the NOMA method, the total signal is a superposition of two signals
where sA and sB these are signals with unit power \( \sqrt {p_{A} } \) and \( \sqrt {p_{B} } \) are the corresponding correction factors resulting from the fact that the power of the signal transmitted in practice is not unitary and different for both signals. Signals received by the receivers of vehicles A and B will have the form, respectively
Where hA and hB they are complex coefficients of radio communication channel influence on transmitted signals that reflect their phase and amplitude changes. In contrast, fA and fB are the powers of thermal noise and interference in the receivers of vehicles, A and B, respectively [13, 14].
In the case of a downlink, of course, the process of removing the SIC interference will have to be implemented in the user’s receiving mobile station. The process of removing the SIC interference in the mobile station receiver is carried out in order starting from the mobile station, for signals which we achieve the highest ratio of the square root of the channel influence factor to noise power and intercell interference. Based on this principle, each user can decode correctly the signal intended for him and at the same time eliminate interference from other user’s signals.
With this in mind and the fact that we are considering a case of two users with the NOMA multiple access methods in which \( \frac{{\left| {h_{A} } \right|^{2} }}{{N_{o,A} }} > \frac{{\left| {h_{B} } \right|^{2} }}{{N_{o,B} }} \) know that user B will not perform interference elimination because it is in the first place in the decoding order. In other words, the interference is removed in this mobile station, for which the SINR value, is smaller before executing the SIC algorithm, as shown in Fig. 8. Therefore, the user A first decodes the signal sB and subtracts its components from the received signal yA before decoding your own signal. However, the literature does not mention the barrier of hA and hB knowledge in both mobile stations, which hinders optimal decision-making in the order, and another aspect is the consideration of intercellular interference in the single-frequency network, which may be relevant using different methods of reuse frequencies in cells (frequency reuse) [13, 14].

Decoding signals useful with SIC algorithms and without SIC algorithms with the NOMA method for downlink [own study]
According to Shannon’s theorem, according to which the information throughput of a continuous channel with B [Hz], the frequency band in which additive white Gaussian noise with average power N0 [W/Hz] occurs, is determined by the formula
where S[W] is the average power of the received signal, and Bs [Hz] this is the channel band.
Bearing in mind the above considerations, we can conclude that the information capacity for user A and user B in the bandwidth of Bs is:
where \( \frac{{p_{A} \left| {h_{A} } \right|^{2} }}{{N_{o,A} }} \) is the ratio of the signal received to interference and noise in station A, and \( \frac{{p_{B} \left| {h_{B} } \right|^{2} }}{{p_{A} \left| {h_{B} } \right|^{2} + N_{o,B} }} \) is the ratio of signal to noise and interference (including interference from signals for station A) in station B [12,13,14].
Thanks to the NOMA method, we can obtain better total data throughput in the C-ITS system. Unfortunately, there are no practical recommendations for the implementation of this method yet.
7 Conclusion
The paper presents the concept of implementing the C-ITS system. In the context of the fact that 5G systems will be launched in a moment, it seems that this cooperative system is likely to be gradually put into practice. Car manufacturers are already implementing certain elements of this system for new vehicles – e.g., a parking assistant. It seems that a big problem may be limiting interference because, in the case of systems affecting human life, we cannot allow ourselves to receive signals incorrectly.
References
European Parliament resolution of 13 March 2018 on a European strategy for cooperative intelligent transport systems
C-ITS Platform Final report Phase II, September 2017
EUR-Lex - 52016DC0766 - EN - EUR-Lex, Communication from the committees to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions. A European strategy for cooperative intelligent transport systems- an important step towards the mobility of cooperating, combined and automated vehicles
Gajewski, S.: Perspectives of transport systems development in the light of radio communication systems evolution towards 5G. In: Mikulski, J. (ed.) TST 2017. CCIS, vol. 715, pp. 203–215. Springer, Cham (2017). https://doi.org/10.1007/978-3-319-66251-0_17
Declaration from Amsterdam on cooperation in the field of combined vehicles and automated vehicles
ETSI ITS-G5 (IEEE 802.11p), April 2016
Gajewska, M.: Design of M2M communications interfaces in transport systems. In: Mikulski, J. (ed.) TST 2016. CCIS, vol. 640, pp. 149–162. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-49646-7_13
Kyösti, P., et al.: WINNER II Channel Models. IST-4-027756 WINNER II, D1.1.2 V1.1, pp. 26–49 (2007)
Wang, S.-Y., et al.: Design and implementation of a more realistic radio propagation model for wireless vehicular networks over the NCTUns network simulator, pp. 1–2. National Chiao Tung University, HsinChu, Taiwan
ETSI TS 103 613 Intelligent Transport Systems (ITS): Access layer specification for Intelligent Transport Systems using LTE Vehicle to everything communication in the 5,9 GHz frequency band, v 1.1.1, November 2018
Boya, D., et al.: V2X meet NOMA: Non – Orthogonal Multiple Access for 5G enabled vehicular networks. IEEE Wirel. Commun. 24(6) (2017)
Benjebbour, A., et. al.: Concept and practical considerations of Non-orthogonal Multiple Access (NOMA) for future radio access. In: Proceedings of the IEEE International Symposium on Intelligent Signal Processing and Communications Systems (ISPACS), pp. 770–774 (2013)
Higuchi, K.: Non-orthogonal Multiple Access (NOMA) with successive interference cancellation for future radio access. IEICE Trans. Commun. E98-B(3), 403–413 (2015)
Riazul Islam, S.M., et al.: Power-domain Non-Orthogonal Multiple Access (NOMA) in 5G systems: potentials and challenges. IEEE Commun. Surv. Tutor. PP(99), 1–42 (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Gajewska, M. (2019). Propagation Loss and Interference Analysis for 5G Systems in the Context of C-ITS System Implementation. In: Mikulski, J. (eds) Development of Transport by Telematics. TST 2019. Communications in Computer and Information Science, vol 1049. Springer, Cham. https://doi.org/10.1007/978-3-030-27547-1_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-27547-1_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27546-4
Online ISBN: 978-3-030-27547-1
eBook Packages: Computer ScienceComputer Science (R0)