
Abstract
This paper deals with the landslides activated by piezometric level changes owing to rainfall. Generally, the main type of movement experienced by these landslides is a translational slide with low displacement rate. In addition, deformations are essentially concentrated within a narrow shear zone above which the unstable soil mass moves as a rigid body. In view of this evidence, a simple approach based on a sliding block model was recently proposed by Conte et al. (2017) for a preliminary evaluation of the mobility of these landslides. This method relates landslide movements to rain recordings. This constitutes a significant advantage for land protection purposes because future displacements could be directly predicted from expected rainfall scenarios. In the present paper, a case study is analyzed to assess the predictive capability of the above-mentioned approach.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Groundwater level fluctuations owing to rainfall frequently control the mobility of active landslides, which is therefore characterized by a succession of phases of rest and motion. The type of movement generally experienced by these landslides is essentially a translational slide with a velocity of some centimeters per year. Therefore, they can be classified as slow moving-landslides (Cruden and Varnes 1996). Soil deformations are generally concentrated within a thin zone at the base of the landslide body, where the soil shear strength is at residual due to the high values of the accumulated strains (Leroueil et al. 1996). On the other hand, the soil above the shear zone undergoes small deformations and is commonly characterized by a horizontal displacement profile that is essentially constant with depth. In engineering practice, the changes in groundwater regime and slope stability are usually analyzed separately using an uncoupled approach. Specifically, after evaluating the pore water pressure distribution along a potential slip surface due to groundwater level variations, the slope stability conditions are assessed in terms of a safety factor using the limit equilibrium method. However, an appropriate analysis for active landslides requires a realistic prediction of the displacements rather than an evaluation of the safety factor. This requirement can be obviously achieved using numerical solutions based for instance on the finite element method, the finite difference method or other numerical techniques (Potts and Zdravkovic 2001; Calvello et al. 2008; Lollino et al. 2011; Conte et al. 2018, 2019). Since the viscous component of soil deformations has a relevant importance when dealing with slow-moving landslides (Vulliet and Hutter 1988; Desai et al. 1995; Van Asch et al. 2007; Di Maio et al. 2013; Conte and Troncone 2018), an elasto-viscoplastic constitutive model is often incorporated in these numerical methods in order to predict the behavior of the unstable soil mass (Olivella et al. 1996; Picarelli et al. 2004; Fernàndez-Merodo et al. 2014; Conte et al. 2014). Nevertheless, the use of such methods is not always justified for practical purposes, especially when specific experimental data concerning the involved constitutive parameters are not available. Simplified methods based on a sliding block model were also proposed in the literature to readily carry out an approximate estimation of the landslide velocity on the basis of the groundwater level changes measured at some piezometers installed in the slope (Angeli et al. 1996; Corominas et al. 2005; Ranalli et al. 2010; Conte and Troncone 2011). However, such methods are unable to predict the landslide movements directly from expected rainfall events. To overcome this drawback, a simple method that relates landslide mobility to rainfall was recently proposed by Conte et al. (2017). In the present study, this method is applied to a case study documented in the literature for assessing its predictive capability.
2 Method of Analysis
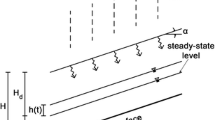
The slope model considered by Conte et al. (2017) is shown in Fig. 1a. Specifically, the landslide is assumed to be a translational slide with deformations concentrated within a thin shear zone of thickness d, above which the soil mass substantially moves as a rigid body. The slope is subjected to a seepage flow parallel to the ground surface with the steady-state groundwater level at depth Hd (Fig. 1b).

(Adapted from Conte et al. 2017)
(a) Slope model considered in the present study; (b) slope model with an indication of the steady-state groundwater level, the groundwater level change owing to rain infiltration, h(t), and the slip surface
In the present study, this level is assumed as the minimum one measured in the observation period. In addition, the groundwater level defines the depth below which pore water pressure is greater than zero. Lastly, it is assumed that a viscous force is activated at the base of the landslide body when movement occurs. Under these assumptions, the motion equation takes the following form:
in which t is time, v(t) is the landslide velocity in the direction parallel to the slope, u(t) is the change in pore water pressure at the failure surface, and uc is a critical threshold for u(t) that is introduced to establish whether or not the landslide moves. Specifically, movement starts when u(t) exceeds uc. The expression of uc is:
where α is the slope angle, H is the depth of the slip surface, Hw is the distance between the steady-state groundwater level and the slip surface, γ is the unit weight of the soil (assumed constant with depth for the sake of simplicity), γw is the unit weight of water, cr’ and ϕr’ are, respectively, the effective cohesion and the friction angle of the soil (within the shear zone) at residual conditions. The other parameters appearing in Eq. (1) are:
where μ is the coefficient of viscosity of the soil within the shear zone, and g is the gravity acceleration. Displacement, s(t), is obtained by integrating v(t). In order to solve Eq. (1), the knowledge of the function u(t) is required. In the method proposed by Conte et al. (2017), this function is obtained by means of a procedure that uses the changes in groundwater level h(t) as input data (Fig. 1b), and accounts for the delay of the hydraulic response as a function of Hw and the coefficient of consolidation cv. Under the hypothesis that a perfect synchronism exists between groundwater level fluctuations and rainfall, h(t) may be evaluated using the following equation (Conte et al. 2017):
where h0 is the initial groundwater level (measured from the steady-state level), N is the number of rain events considered, hrj is the water volume (per unit area) that infiltrates into the soil during the jth rain event, t0j is the time at which the jth event commences, A and kT are model parameters. Following Conte and Troncone (2012), every value of hrj is equal to or less than the potential infiltration volume (per unit area) through the ground surface, \( \overline{h} \). An equation similar to Eq. (6) was used by Montrasio and Valentino (2008) to solve a different problem. Summarizing, the parameters required by the method are: γ, ϕr’, cr’ (which is generally nil), cv, A, kT, \( \overline{h} \) and β. Some of them (γ, ϕr’, cr’ and cv) can be readily obtained from conventional geotechnical tests. The other parameters should be calibrated on the basis of measurements of piezometric level and soil displacement. In some circumstances, a calibration of cv should be opportune as well, considering that this parameter is significantly affected by the presence of fissures, discontinuities, or thin layers of very permeable materials. In the method proposed by Conte et al. (2017), the calibration of the above-mentioned parameters is achieved by minimizing an objective function defined as the sum of the square of the residuals (i.e. the difference between observation and prediction) at any time. The minimization process is performed using the trust region reflective algorithm (MathWorks 2012). Once these parameters are evaluated, the method may be used for land protection purposes, to predict future landslide movements directly from expected rain events.
3 Application of the Method to the Alverà Landslide
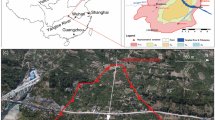
In this section, the method previously described is applied to analyze the Alverà landslide located near Cortina d’Ampezzo, in the Eastern Dolomites (Northern Italy). This landslide is documented in several studies, in which the data from a prolonged field monitoring are published (Deganutti and Gasparetto 1991; Angeli et al. 1996, 1999). The subsoil of the landslide area consists of clayey soils resulting from the weathering processes that affected the San Cassiano formation. This geological formation outcrops in the upper portion of the slope and is characterized by a succession of layers of sandstone, marl and clay. From a morphological viewpoint, the slope can be subdivided into three sectors (Angeli et al. 1999): the source sector with an average slope angle α = 10°, which is affected by superficial landslides; the central sector (with α = 5°) characterized by deep slip surfaces (over 20 m) and slow velocities (around 1 cm per year); the foot sector (α = 10°) where a very active mudslide with displacement rates around 10 cm per year is located. The analysis performed in the present study concerns this latter landslide, the cross-section of which is schematized in Fig. 2.

(Modified from Angeli et al. 1999)
Schematic cross-section (with an exaggerated vertical scale) of the Alverà landslide with an indication of the location of the inclinometer S5
The slip surface is located at a depth of about 5 m from the ground surface, as evidenced by the inclinometer S5 the location of which is indicated in Fig. 2 (Gasparetto et al. 1996). Inclinometer readings also showed that soil deformations are essentially localized in a distinct shear zone at the base of the unstable soil mass. Continuous measurements of pressure head and soil displacement are available for a long period (about six years). These measurements were provided by electrical transducers and steel wire extensometers, respectively (Angeli et al. 1999). A certain synchronism was observed between rainfall and groundwater level changes (evaluated from the pressure head measurements), although these latter are also affected by additional water supplies owing to snow melting. This synchronism could be ascribed to the numerous sub-vertical fractures present at the ground surface of the unstable soil mass (Angeli et al. 1999). All these observations are consistent with the assumptions on which the method proposed by Conte et al. (2017) is based. Referring to the schemes in Fig. 1, the slope is modelled as an infinite slope with H = 5 m, Hd= 2.11 m, Hw= 2.89 m and α = 10°. The available soil properties are γ = 18.73 kN/m3, cr’ = 0 kPa and ϕr’ = 15.9° (Angeli et al. 1999).
The other parameters required by the method are estimated by matching the available measurements with the theoretical results provided by this method, in accordance with the calibration procedure described in the previous section. Specifically, rainfall recorded from October 1990 to December 1993 (Fig. 3a) and the piezometric measurements carried out in the same period (Fig. 3b) are first considered to estimate \( \overline{h} \), kT and A. Afterwards, the soil displacements concerning that period are used to calibrate cv and β. The resulting values are reported in Table 1.

(a) Daily rainfall; (b) measured and calculated groundwater level changes; (c) calculated pore pressure changes at the depth of the slip surface with an indication of uc; (d) measured and calculated horizontal displacements. Recordings of rainfall, groundwater level and displacement are drawn from Angeli et al. (1996)
Figure 3b compares the measured and calculated groundwater levels. Moreover, for the sake of completeness, the pore water pressure changes calculated at the slip surface are shown in Fig. 3c along with the value of uc. Finally, a comparison in terms of soil displacements is presented in Fig. 3d. As can be seen, the calculated soil displacements are in fairly good agreement with those measured. However, some differences exist between predicted and observed groundwater level fluctuations. These discrepancies should be due to possible water supplies deriving from snow melting (whose effects are not accounted for in the present analysis) and the simplified assumptions on which the employed method is based.
After calibrating the model parameters, a prediction of the soil displacements observed in a subsequent time period (from January 1994 to May 1996) is carried out on the basis only of the rainfall recorded in this latter period and using the parameters indicated in Table 1. A comparison between measured and calculated displacements is presented in Fig. 4. The predicted displacements (indicated by a red line in Fig. 4) match very well the observed data. These results corroborate the predictive capability of the simplified method used in this study.

(a) Daily rainfall; (b) measured and calculated horizontal displacements. Measured displacements are drawn from Angeli et al. (1999)
4 Concluding Remarks
A simplified method has been used to analyze the mobility of landslides periodically reactivated by rainfall. This method relates rainfall to groundwater level changes and these latter to landslide movements. An advantage of the method is that it requires few parameters as input data, some of them can be readily obtained from conventional geotechnical tests. However, the remaining parameters should be calibrated on the basis of available measurements of rainfall, groundwater level and soil displacement. After performing this calibration, the method could be used to predict future landslide movements directly from expected rainfall scenarios. Although limited only to one case study, the results presented in this paper confirm the predictive capability of the above method.
References
Angeli MG, Gasparetto P, Menotti RM, Pasuto A, Silvano S (1996) A visco-plastic model for slope analysis applied to a mudslide in Cortina d’Ampezzo, Italy. Q J Eng Geol. Hydrogeol 29(3):233–240
Angeli MG, Pasuto A, Silvano S (1999) Towards the definition of slope instability behavior in the Alverà mudslide (Cortina d’Ampezzo, Italy). Geomorphol 30:201–211
Calvello M, Cascini L, Sorbino G (2008) A numerical procedure for predicting rainfall-induced movements of active landslides along pre-existing slip surfaces. Int J Numer Anal Meth Geomech 32:327–351
Conte E, Troncone A (2011) An analytical method for predicting the mobility of slow-moving landslides owing to groundwater fluctuations. J Geotech Geoenviron Eng ASCE 137(8):777–784
Conte E, Troncone A (2012) A method for the analysis of soil slips triggered by rainfall. Géotech 62(3):187–192
Conte E, Donato A, Troncone A (2014) A finite element approach for the analysis of active slow-moving landslides. Landslides 11(4):723–731
Conte E, Donato A, Troncone A (2017) A simplified method for predicting rainfall-induced mobility of active landslides. Landslides 14:35–45
Conte E, Donato A, Pugliese L, Troncone A (2018) Analysis of the Maierato landslide (Calabria, Southern Italy). Landslides 15:1935–1950
Conte E, Troncone A (2018) A performance-based method for the design of drainage trenches used to stabilize slopes. Eng Geol 239:158–166
Conte E, Pugliese L, Troncone A (2019) Post-failure stage simulation of a landslide using the material point method. Eng Geol 253:149–159
Corominas J, Moya J, Ledesma A, Lloret A, Gili JA (2005) Prediction of ground displacements and velocities from groundwater level changes at the Vallcebre landslide (Eastern Pyrenees, Spain). Landslides 2(2):83–96
Cruden DM, Varnes DJ (1996) Landslides – investigation and mitigation. In: Special report No. 247, Transportation Research Board, National Academy Press, Washington, DC
Deganutti A, Gasparetto P (1991) Some aspects of a mudslide in Cortina, Italy. In: Proceedings of the 6th International Symposium on Landslides, vol 1. Christchurch, New Zealand, pp 373–378
Desai CS, Samtani NC, Vulliet L (1995) Constitutive modeling and analysis of creeping soils. J Geotech Eng ASCE 121(1):43–56
Di Maio C, Vassallo R, Vallario M (2013) Plastic and viscous shear displacements of a deep and very slow landslide in stiff clay formation. Eng Geol 162:53–66
Fernàndez-Merodo JA, Garcìa-Davalillo JC, Herrera G, Mira P, Pastor M (2014) 2D viscoplastic finite element modelling of slow landslides: the Portalet case study (Spain). Landslides 11(1):29–42
Gasparetto P, Mosselman M, Van Asch TWJ (1996) The mobility of the Alverà landslide (Cortina d’Ampezzo, Italy). Geomorphol 15:327–335
Leroueil S, Vaunat J, Picarelli L, Locat J, Faure R, Lee H (1996) A geotechnical characterization of slope movements. In: Proceedings of the 7th International Symposium on Landslides, vol 1. Trondheim, pp 53–74
Lollino P, Santaloia F, Amorosi A, Cotecchia F (2011) Delayed failure of quarry slopes in stiff clays: the case of the Lucera landslide. Géotech 61(10):861–874
MathWorks (2012) Matlab user’s guide. The MathWorks Inc., Natick, MA
Montrasio L, Valentino R (2008) A model for triggering mechanism of shallow landslides. Nat Hazards Earth Syst Sci 8:1149–1159
Olivella S, Gens A, Carrera J, Alonso EE (1996) Numerical formulation for a simulator (CODE_BRIGHT) for the coupled analysis of saline media. Eng Comput 13(7):87–112
Picarelli L, Urciuoli G, Russo C (2004) Effect of groundwater regime on the behavior of clayey slopes. Can Geotech J 41:467–484
Potts DM, Zdravkovic L (2001) Finite element analysis in geotechnical engineering: application. Thomas Telford, London
Ranalli M, Gottardi G, Medina-Cetina Z, Nadim F (2010) Uncertainty quantification in the calibration of a dynamic viscoplastic model of slow slope movements. Landslides 7(1):31–41
Van Asch TWJ, Van Beek LPH, Bogaard TA (2007) Problems in predicting the mobility of slow-moving landslides. Eng Geol 91:46–55
Vulliet L, Hutter K (1988) Viscous-type sliding laws for landslides. Can Geotech J 25(3):467–477
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Conte, E., Troncone, A., Donato, A., Pugliese, L. (2020). Prediction of the Mobility of Landslides Activated by Rainfall Using a Simplified Approach. In: Calvetti, F., Cotecchia, F., Galli, A., Jommi, C. (eds) Geotechnical Research for Land Protection and Development. CNRIG 2019. Lecture Notes in Civil Engineering , vol 40. Springer, Cham. https://doi.org/10.1007/978-3-030-21359-6_30
Download citation
DOI: https://doi.org/10.1007/978-3-030-21359-6_30
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-21358-9
Online ISBN: 978-3-030-21359-6
eBook Packages: EngineeringEngineering (R0)