
Abstract
Modal analysis of mechanical systems and structures is a powerful tool for the assessment of vibrational behavior. Dynamical mechanical systems per their intention are used in a vast range of configurations and the vibrational behavior throughout is of interest. Therefore, modal analysis would be necessary at all operating points, which of course would result in great computational effort. To reduce the amount of modal analyses that are needed, an approximation method is introduced here based on Taylor expansion around a single operating point.
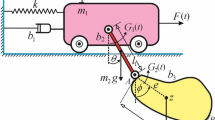
The parametric modal analysis of this work is based on that introduced by Wittmuess et al. (2016). Using the eigenpair values at an operating point and analytical sensitivity analysis a polynomial expression is derived while the operating position is parameterized together with other variable physical quantities. A two-dof planar robot carrying out a pick-and-place trajectory with a range of payload mass is used to validate this method. This robot is modeled as a flexible multibody system in generalized coordinates using the equivalent rigid link system (ERLS) approach. The approximated results of the eigenpairs are compared with the true results in terms of their values, modal assurance criterion (MAC) and relative error. These values are demonstrated and discussed for the range of trajectory and varying payload.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Belotti, R., Caracciolo, R., Palomba, I., Richiedei, D., Trevisani, A.: An updating method for finite element models of flexible-link mechanisms based on an equivalent rigid-link system. Shock and Vibration 2018 (2018). DOI https://doi.org/10.1155/2018/1797506
Damaren, C.J.: A comparison of model reduction techniques from structural dynamics, numerical mathematics and systems and control. INT J ROBOT RES 19(3), 238–253 (2000)
Palomba, I., Richiedei, D., Trevisani, A.: A reduction strategy at system level for flexible link multibody systems. International Journal of Mechanics and Control 18(2), 59–68 (2017)
Palomba, I., Vidoni, R., Wehrle, E.: Application of a parametric modal analysis approach to flexible-multibody systems. In: Mechanism Design for Robotics. MEDER 2018. Mechanisms and Machine Science, vol. 66 (2019)
Richiedei, D., Trevisani, A.: Simultaneous active and passive control for eigenstructure assignment in lightly damped systems. MECH SYST SIGNAL PR 85, 556–566 (2017)
Shabana, A., Wehage, R.: A coordinate reduction technique for dynamic analysis of spatial substructures with large angular rotations. J STRUCT MECH pp. 401–431 (1983)
Vidoni, R., Gallina, P., Boscariol, P., Gasparetto, A., Giovagnoni, M.: Modeling the vibration of spatial flexible mechanisms through an equivalent rigid-link system/component mode synthesis approach. J VIB CONTROL 23(12), 1890–1907 (2017)
Vidoni, R., Gasparetto, A., Giovagnoni, M.: A method for modeling of three-dimensional flexible mechanisms based on an equivalent rigid-link system. J VIB CONTROL pp. 483–500 (2014)
Wehrle, E., Palomba, I., Vidoni, R.: In–operation structural modification of planetary gear sets using design optimization methods. In: Mechanism Design for Robotics. MEDER 2018. Mechanisms and Machine Science, vol. 66, pp. 395–405 (2019)
Wittmuess, P., Henke, B., Tarin, C., Sawodny, O.: Parametric modal analysis of mechanical systems with an application to a ball screw model. In: Decision and Control (CDC) 2015 IEEE 54th Annual Conference on, pp. 5352–5357 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Palomba, I., Wehrle, E., Vidoni, R., Gasparetto, A. (2019). Parametric eigenvalue analysis for flexible multibody systems. In: Uhl, T. (eds) Advances in Mechanism and Machine Science. IFToMM WC 2019. Mechanisms and Machine Science, vol 73. Springer, Cham. https://doi.org/10.1007/978-3-030-20131-9_410
Download citation
DOI: https://doi.org/10.1007/978-3-030-20131-9_410
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-20130-2
Online ISBN: 978-3-030-20131-9
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)