
Abstract
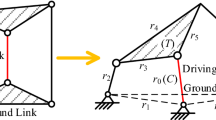
A novel planar six-bar bionic leg is proposed in this paper. The motion equation of this bionic leg is derived fast and conveniently according to the modeling of Assur group and then the trajectory of the foot point of the bionic leg is obtained. Compared with Theo Jansen linkage, the motion characteristics of this leg are evaluated from two aspects: step length and step height of the foot point trajectory. The results show that this novel planar six-bar bionic mechanism still has good motion characteristics under the condition of fewer linkages. Finally, a prototype of an eight-legged bionic walking vehicle is designed.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


Reference
Nansai S, Elara M R, Iwase M. Dynamic analysis and modeling of Jansen mechanism. Procedia Engineering, 64, 1562–1571 (2013).
Carbone G, Ceccarelli M. Legged robotic systems. Cutting Edge Robotics, 553–576 (2005).
Jansen T. Theo Jansen: The Great Pretender. Nai010 Publishers, Rotterdam (2007).
Komoda K, Wagatsuma H. A study of availability and extensibility of Theo Jansen mechanism toward climbing over bumps. The 21st Annual Conference of the Japanese Neural Network Society, December, pp.3–28 (2011).
Komoda K, Wagatsuma H. Energy-efficacy comparisons and multibody dynamics analyses of legged robots with different closed-loop mechanisms. Multibody System Dynamics, 40(2), 123–153 (2017).
Liang C, Ceccarelli M, Takeda Y. Operation analysis of a Chebyshev-Pantograph leg mechanism for a single DOF biped robot. Frontiers of Mechanical Engineering, 7(4), 357–370 (2012).
Lokhande N G, Emche V B. Mechanical Spider by Using Klann Mechanism. International Journal of Mobile Computing and Applications, 1(5), 13–16 (2013).
Parekh B J, Thakkar P N, Tambe M N. Design and analysis of theo Jansen’s mechanism based sports ground (pitch) marking robot. 2014 Annual IEEE India Conference (INDICON), pp.1–5 (2014).
Nansai S, Rojas N, Elara M R, et al. On a Jansen leg with multiple gait patterns for recon-figurable walking platforms. Advances in Mechanical Engineering, 7(3), 1–18 (2015).
Pop F, Lovasz E C, Pop C, et al. Dimensional synthesis of a leg mechanism. Materials Science & Engineering Conference Series, 147 (1), 012083 (2016).
Zang H B, Shen L G. Research and Optimization Design of Mechanism for Theo Jansen Bionic Leg. Journal of Mechanical Engineering, 53(15), 101–109 (2017).
Wang C Y, Hou J H. Analysis and Applications of Theo Jansen’s Linkage Mechanism-Theo Jansen’s Linkage Mechanism on Kinetic Architecture. Proceedings of the 23rd CAADRIA Conference, Tsinghua University, Beijing, China, pp.359–368 (2018).
Jansen’s linkage, From Wikipedia, the free encyclopedia, September, Available: https://en.wikipedia.org/wiki/Jansen%27s_linkage, last accessed 2018/9/16.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Xu, K., Liu, H., Zhu, X., Song, Y. (2019). Kinematic analysis of a novel planar six-bar bionic leg. In: Uhl, T. (eds) Advances in Mechanism and Machine Science. IFToMM WC 2019. Mechanisms and Machine Science, vol 73. Springer, Cham. https://doi.org/10.1007/978-3-030-20131-9_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-20131-9_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-20130-2
Online ISBN: 978-3-030-20131-9
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)