
Abstract
This paper presents a novel approach for urban road networks to estimate traffic speeds using vehicle trajectories captured by detectors on transportation cells. By scanning and analyzing dynamic traffic streams of passing-vehicles, we calculate the real-time traffic speed of road segment separated by adjacent detectors, which are further synthesized to present the traffic speed of whole road. Compared to driving routes data with limited coverage or floating GPS data with occasional missing that are both frequently utilized for traditional road speed estimation, our approach utilizes the full coverage detector data and is proved to have more accurate and reliable results in its application for two large cities of China. An analysis and visualization system was hence developed, whose successful operation in several transportation departments indicated the efficiency of our approach. It helps to guide travelers the optimal driving routes, which greatly relieves the huge traffic stress of city road.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
With the rapid development of economy and society, the numbers of vehicles in large cities increase dramatically [1]. Not only the developed countries, but also the developing countries suffer seriously from traffic congestion. As we all know, estimating dynamic road traffic speeds helps the drivers to find out the optimal routes to their destinations, and therefore relieve the huge stress of city road network [2, 3].
Currently, there are two types of data source that are most frequently employed to estimate the traffic speed: the floating-vehicle-based data captured from moving vehicles and the cell-based data captured from detectors installed along transportation cells [4, 5]. Compared to the floating-vehicle data, cell-based data have the following advantages [6,7,8]. (1) They cover almost all trajectories of all vehicles running on the major roads of city. Thus, they are far more representative of the traffic condition of whole city. (2) The geographical position and moving directions can be accurately captured when all vehicles pass through the detectors along transportation cells. (3) Different from fixed patterns due to the driving preferences of some floating vehicles, such as taxis, the randomness of cell-based data enhances the accuracy of estimation greatly.
In this paper, by utilizing vehicle trajectories captured from the detectors installed along transportation cells, we present a novel approach to estimate road traffic speeds. By scanning and analyzing the traffic streams of passing-vehicles in real time, such as plate number, passing time, the detector passed-by etc., we calculate the real-time traffic speed of the road segment separated by adjacent detectors, which are further synthesized to present the traffic speed of whole road.
The structure of the paper is as follows: Sect. 2 is an overview of previous work in road traffic speeds estimation. In Sect. 3, we present a detailed description of our approach to estimate real-time road traffic speeds from cell-based vehicle trajectories. Section 4 demonstrates the application of our approach in two Chinese cities for their road traffic relief with a corresponding system introduced in the end. We conclude the paper and present future directions in Sect. 5.
2 Related Works
A large number of studies have been carried out on road traffic speed estimation due to its importance in road network traffic relieve. According to Wang et al., methods for traffic speed estimation can be classified to into two categories: traffic theory based methods and data-analysis based methods [9].
Traffic theory based methods requires for well-established theoretical background in transportation field. They take the effects of various factors into consideration when establishing the estimation models, like incidents, road works, traffic control measures, etc., and are usually able to better simulate the actual traffic situation. However, better simulation usually needs more complicated and intensive computation, which further led to lower method efficiency [10]. In addition, many parameters that are needed in the methods should be defined in advance, which greatly enhances the difficulty to precede the study [11].
Data analysis based methods are easier to implement since they are data–driven models who aims to mine the patterns using traffic data and conduct estimation based on those patterns [12]. Nowadays, with the development of traffic surveillance systems, more and more real-time high-frequency traffic data become available. The development of data analysis technology also accelerates the study and utilization of data-driven methods. Linear regression [13], time series [14], kalman filtering [15], nonparametric regression [16], artificial neural networks (ANNs) [17] and many other data analysis models have been utilized to predict road traffic speeds.
Generally speaking, the majority of both types of above-mentioned methods for traffic speed estimation address the problem in two steps [18]: (a) map-matching and path inference, where the optimal path (usually the shorted path) is planned and chosen on the road map (see for example [19,20,21]); (b) travel speed calculation and estimation, where real-time data are input and calculated to dynamic speed of every road (see for example [22, 23]). In our study, the similar two steps are adopted and detailed process is as follows: historical detector data are first utilized to generate adjacent detector pairs and to calculate the shortest path between them, then dynamic detector data are used to estimate real-time traffic speed of every road segment separated by detector pairs and the results are synthesized to present the traffic speed of whole road further.
3 Methodologies
3.1 Model Architecture
The architecture of our approach is given in Fig. 1. As we can see, various data are integrated and applied to realize the real-time estimation of road traffic speeds, including Map Data, Detectors Data and Passing-Vehicle Data. The core of the model consists of two main modules, namely, the module of Generating Adjacent Detector-Pairs, which generates adjacent detector pairs and calculate their shortest path based on Road Networks data (Map Data) and Detectors Data, and the module of Calculating Traffic Speed, which estimates the real-time traffic speed of the road segment separated by adjacent detectors based on Passing-Vehicle Data and further synthesize to present the traffic speed of whole road. Eventually, the estimated results are visualized to demonstrate the traffic situation of the whole study area.

The model architecture
3.2 Data Sources
For our approach, various data source are integrated and applied. The three main data sources are listed as follows: (1) Map Data, vector geographic data which contains the road ID (unique number), coordinate of the two endpoints and the midpoint of each road. (2) Detectors Data, dynamic data which contains the detector ID (unique number) and coordinate of each detector installed on the intersection or along the road. (3) Passing-Vehicle Data, real-time data which contains license plate number, vehicle pictures, passing detector ID and passing time, of each moving vehicle when passing detectors.
3.3 Generating Adjacent Detector Pairs
Historical detector data and passing-vehicle data were used to generate adjacent detector pairs and to calculate the shortest path between them. The detailed process is shown in Fig. 2 and described as follows:

Generating adjacent detector pairs
Step 1. Initializing Map Grid
The study area is divided into map grids composed of meshes with same size. A road is regarded to locate in a certain mesh if its midpoint is inside the mesh. A “Mesh-Road List” is thus kept to record which mesh each road locates in.
Step 2. Identifying Adjacent Detector Pairs
Two detectors passed sequentially by a certain large number of vehicles are identified as an adjacent detector pair and their info are stored into a list called “Adjacent Detector Pair Set”.
Step 3. Calculating Shortest Paths between Adjacent Detector Pairs
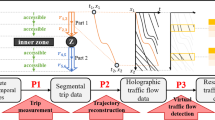
The process of calculating the shortest path between adjacent detectors is as follows (Fig. 3): (1) Find the exact mesh where the detector locates according to its coordinate. (2) Find all the roads which locate in the aforementioned mesh and acquire its neighboring 8 meshes from the “Mesh-Road List”. (3) Calculate distance between the detector and each road. The detector is considered to locate on one specific road if the distance between the detector and the road is the shortest. The calculation of shortest path between two adjacent detectors is therefore converted into the calculation of shortest path between two roads where the detectors locate. (4) Construct a “Path Ladder” (PL) that consists of multiple meshes and continuously covers these two adjacent detectors. (5) Construct a “Traffic Region Graph” (TRG), in which the vertex represents the road in PL, whereas the edge represents the line connecting two adjacent vertexes, i.e., two roads with the same endpoint. The weight of edge is equal to the sum of the distance from the midpoint of each road to their connecting endpoint. (6) Find the shortest path along the map between two roads, which is as the shortest path between two adjacent detectors, using Dijkstra’s algorithm.

The generation of adjacent detector-pairs
3.4 Estimating Real-Time Traffic Speed
Real-time detector data and passing vehicle data were used to estimate real-time traffic speed of every detector and every road further, and then to visualize the traffic situation of the whole study area. The detailed process is as follows:
Step 1. Creating “outMap”
In order to estimate traffic speed, we first create an “outMap” to store the latest driving information of vehicles. The inner structure of “outMap” is as following: “plate number” —> (“detector number”, “passing time”).
Step 2. Calculating Passing Records Every t Minutes
We first read vehicle passing records collected in the nearest T minutes (rollback time, T > t) in ascending order according to passing time. Afterward, we create an “inMap” to eliminate the influence due to the overlap between two adjacent rounds of speed calculation, whose inner structure is the same as that of “outMap”. For each passing record, we successively search its previous passing record with the same plate number in “inMap” and “outMap” if it belongs to the overlapping portion; otherwise we only search it in “outMap”. We then obtain the vehicle’s speed through dividing the shortest distance between two detectors sequentially passed by with the passing time interval, and save it to a list called “Detector-Speed List”. Meanwhile, we update the information in “inMap” or “outMap” for the next rounds of calculation. A sample of handling passing-vehicle records is shown in Fig. 4 (\( t = 1,\,T = 5 \)).

The consecutive calculation of traffic speeds (\( t = 1, \,T = 5 \))
Step 3. Estimating Traffic Speed on Every Road
After handling all the passing-vehicle data, we employ the Grubbs’ criterion (\( \alpha = 0.9 \)) to eliminate unusual data in the “Detector-Speed List”. We then use the average value of the remaining data as the speed of road segment separated by adjacent detectors. Finally, considering that one road may be included in more than one path separated by adjacent detectors, we calculate the real-time traffic speed \( v_{i} \) of road \( i \) using the weighted average of every calculated speed, as shown in Eq. 1:
where \( R_{i} \) is the union of all paths that include road \( i \), \( v_{k} \) is the traffic speed of path \( k \), and \( l_{i} \) and \( l_{k} \) are the lengths of road \( i \) and path \( k \), respectively.
4 Demonstrations
We applied the presented approach in two large cities in eastern China, namely Jiaxing city and Quzhou city, each having more than 1 million residents.
In Jiaxing, we employed the traffic streams provided by 403 video detectors along transportation cells while in Quzhou, 313 video detectors were employed. In the experiment, we set the update frequency, or variable \( t \), to 1 min, and set the rollback time, or variable \( T \), to 5 min. Eventually, we identified 1047 adjacent detector pairs and 11,898 roads in Jiaxing. In Quzhou, 879 adjacent detector pairs and 7,801 roads were identified. Based the approach described in this paper, a system called “Real-time Road Traffic Big Data Analysis System” is developed. The system is currently steadily operated in the transportation departments in cities like Jiaxing, Quzhou and so on, as Fig. 5 shows.

Real-time road traffic big data analysis system (a) Positions of detectors and car-type analysis captured by these detectors (b) Visualization of estimated real-time road traffic speeds on road maps
Monitoring of Car-type and Abnormal Vehicle Detection
All types of traffic data, including map data, dynamic detector data and real-time passing-vehicle data were integrated in our system. In this way, we’re able to select the interested detector to see the real-time traffic conditions captured by the selected detector. In addition, the system also provides the function of car-type identification and abnormal vehicle detection. Figure 4(a) demonstrates the vehicles captured by detectors at 14:48:31, November 16th, 2015. It also listed abnormal vehicles, abnormal causes and their plate numbers.
Real-time Visualization of Estimated Road Speeds
Based on the integrated data and our estimation approach, road traffic speeds of all roads are visualized on the map in our system at the frequency of one minute. Green lines indicate unblocked roads; while yellow and red lines indicate busy roads and congested roads, respectively. Road names and their corresponding estimated speeds are listed in the lower right corner of the system interface for users who are interested in detailed road traffic speeds of a specific road as in Fig. 4(b).
5 Conclusions
In this paper, a real-time road traffic speed estimation approach based on the traffic stream captured by detectors along transportation cells is presented. It helps to guide travelers the optimal driving routes, which greatly relieves the huge traffic stress of city road. Compared to traditional road traffic speed estimation methods, our approach has the following advantages. (1) The data sources of our approach are all-type vehicles rather than just partial public vehicles such as taxis and buses. (2) Compared to driving routes data with limited coverage or floating GPS data which suffers from occasional missing, the data we used from detectors is more sufficient, reliable and accurate. (3) The results that our approach calculated are two-way speeds rather than one-direction speeds, which is more practical and close to reality.
The application of our approach in two large cities in eastern China indicated its efficiency and accuracy, while the successful operation of our developed system demonstrated its importance and practicality in daily life. In the future, we will try to integrate other data sources, such as loop detectors, into our approach to achieve better results.
References
Richards, P.I.: Shock waves on the highway. Oper. Res. 4(1), 42–51 (1956)
Han, J., Li, Z., Tang, L.A.: Mining moving object, trajectory and traffic data. In: Kitagawa, H., Ishikawa, Y., Li, Q., Watanabe, C. (eds.) DASFAA 2010. LNCS, vol. 5982, pp. 485–486. Springer, Heidelberg (2010). https://doi.org/10.1007/978-3-642-12098-5_56
Wang, Z., Lu, M., Yuan, X., Zhang, J.: Visual traffic jam analysis based on trajectory data. IEEE Trans. Visual Comput. Graphics 19, 2159–2168 (2013)
Lai, W.K., Kuo, T.H., Chen, C.H.: Vehicle speed estimation and forecasting methods based on cellular floating vehicle. Data. Appl. Sci. 6(2), 47 (2016)
Liu, H., Sun, J.: Improving freeway traffic speed estimation using high-resolution loop detector data, Technical report. Center for Transportation Studies (2013)
Wang, Z., Ye, T., Lu, M., Yuan, X., Qu, H., Yuan, J., Wu, Q.: Visual exploration of sparse traffic trajectory data. IEEE Trans. Visual Comput. Graphics 20, 1813–1822 (2014)
Bouillet, E., Ranganathan, A.: Scalable, real-time map-matching using IBM systems. In: Mobile Data Management, pp. 249–257 (2010)
Wang, H., Li, Z., Hurwitz, D., Shi, J.: Parametric modeling of the heteroscedastic traffic speed variance from loop detector data. J. Adv. Transp. 49(2), 279–296 (2015)
Wang, J., Shi, Q.: Short-term traffic speed forecasting hybrid model based on chaos-wavelet analysis-support vector machine theory. Transp. Res. Part C 27(2), 219–232 (2013)
Waller, S.T., Chiu, Y.C., Ruizjuri, N., et al.: Short Term Travel Time Prediction on Freeways in Conjunction with Detector Coverage Analysis. Austin (2007)
Willinger, W.: Traffic modeling for high-speed networks: theory versus practice. Inst. Math. Appl. 71, 395 (1995)
Van, L.J., Hoogendoorn, S., Van, Z.H.: Robust and adaptive travel time prediction with neural networks. Technical report, Proceedings of the 6th Annual TRAIL Congress (Part 2) (2000)
Shan, Z., Zhao, D., Xia, Y.: Urban road traffic speed estimation for missing probe vehicle data based on multiple linear regression model. In: International IEEE Conference on Intelligent Transportation Systems, pp. 118–123. IEEE (2013)
Grundy, C., Steinbach, R., Edwards, P., et al.: Effect of 20 mph traffic speed zones on road injuries in London, 1986–2006: controlled interrupted time series analysis. Br. Med. J. 340(7736), 31 (2010)
Wang, Y., Papageorgiou, M., Messmer, A.: Real-time freeway traffic state estimation based on extended Kalman filter: adaptive capabilities and real data testing. Transp. Res. Part A 42(10), 1340–1358 (2008)
Shi, D.X., Ding, T.J., Ding, B., et al.: Traffic speed forecasting method based on nonparametric regression. Comput. Sci. 43(2), 224–229 (2016). In Chinese
Jiang, X., Adeli, H.: Dynamic wavelet neural network model for traffic flow forecasting. J. Transp. Eng. 131(10), 771–779 (2005)
Rahmani, M., Koutsopoulos, H.N., Jenelius, E.: Travel time estimation from sparse floating car data with consistent path inference: a fixed point approach. Transp. Res. Part C Emerg. Technol. 85, 628–643 (2015)
Newson, P., Krumm, J.: Hidden Markov map matching through noise and sparseness. In: ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, pp. 336–343. ACM (2009)
Kim, K., Seol, S., Kong, S.H.: High-speed train navigation system based on multi-sensor data fusion and map matching algorithm. Int. J. Control Autom. Syst. 13(3), 503–512 (2015)
Marchal, F., Hackney, J., Axhausen, K.W.: Efficient map matching of large global positioning system data sets: tests on speed-monitoring experiment in Zürich. Transp. Res. Rec. J. Transp. Res. Board 1935(1), 93–100 (2005)
Yue, Y., Zou, H.X., Li, Q.Q.: Urban road travel speed estimation based on low sampling floating car data. In: International Conference of Chinese Transportation Professionals, pp. 1–7 (2009)
Shan, Z., Zhao, D., Xia, Y.: Urban road traffic speed estimation for missing probe vehicle data based on multiple linear regression models. In: International IEEE Conference on Intelligent Transportation Systems, pp. 118–123. IEEE (2013)
Acknowledgments
The work is supported by National Natural Science Foundation of China (No. 61472112, No. 61702144), Key Science and Technology Project of Zhejiang Province (No. 2017C01010), and Natural Science Foundation of Zhejiang Province (No. LY12F02003).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Sun, X., Yu, D., Liao, S., Li, W., Zhou, C. (2019). Real-Time Estimation of Road Traffic Speeds from Cell-Based Vehicle Trajectories. In: Liu, X., et al. Service-Oriented Computing – ICSOC 2018 Workshops. ICSOC 2018. Lecture Notes in Computer Science(), vol 11434. Springer, Cham. https://doi.org/10.1007/978-3-030-17642-6_19
Download citation
DOI: https://doi.org/10.1007/978-3-030-17642-6_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-17641-9
Online ISBN: 978-3-030-17642-6
eBook Packages: Computer ScienceComputer Science (R0)