
Abstract
The adoption of wind turbines to produce electric energy nowadays represents one of the most promising alternatives to the use of the exhausting fossil fuel stocks. The actual tendency is toward the design of taller towers that can produce more power because excited by stronger winds. There is the need of designing these structures in a cost effective way, aiming to reduce the wind induced growing structural demand. Three different control systems are investigated and compared herein to this aim, on the basis of the experimental results gathered at the Structural Dynamics Laboratory of the Denmark Technical University. Two of these are passive (tuned rolling-ball damper, spherical tuned liquid damper), while the third one is semi-active and aims at realizing a time-variant base restraint. The experimental comparison of the three strategies, tested against two types of wind loads, allow to draw interesting conclusions and to provide useful hints to give rise to further developments of the technologies investigated.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Wind turbines
- Tuned mass damper
- Tuned liquid damper
- Semi-active MR devices
- Shaking table test
- Vibration control
1 Introduction
Wind turbines are becoming a highly capability and attractive mean of producing electricity, given that the energy crisis becomes more and more serious. Recently the wind turbine towers have grown from 40 m to 100 m, with consequent larger turbine power, because taller towers winds are stronger at higher altitudes. It is quite important to optimize the construction process of the towers, as it generally represents 20% of the final cost of a wind turbine. Taller wind turbines are characterized by complex vibration problems due to the interaction of the rotating blades with the tower. In case of offshore wind turbines installed in coastal regions with high quality wind sources, the influence of wave loads makes their dynamic response even more complex, and the coupling of wind and wave loads on slender wind turbine towers may determine excessive vibrations that can inhibit the mechanical system of the nacelle and produce fatigue damage on the support system. Therefore, vibration control of wind turbine towers is a fundamental issue for guarantee the development of wind energy and reducing maintenance costs.
Nowadays passive vibration control is a mature technology and the tuned mass damper (TMD) is one of the simplest and the most reliable passive control devices: the application of TMD for tall buildings under wind or earthquakes has been extensively investigated.
Lackner and Rotea (2011) investigated the effectiveness of an optimal passive TMD and of a hybrid mass damper in reducing fatigue loads due to bending moment at the base of the tower, showing a percentage reduction of about 10% and 30% respectively due to each of the two proposed systems. Karimi et al. (2010) and Luo et al. (2011) proposed a SA control technique for floating wind turbines with TLCD: this device, generally used as a passive damper, turns into a SA device using a controllable valve; the orifice opening is real time adapted according to the structure response and loading conditions, by means of a control logic based on a H∞ feedback methodology. Kirkegaard et al. (2002) have been the first to explore the use of magnetorheological (MR) dampers to control a wind turbine, assuming such type of smart device to be installed, in a vertical position, between the base and the top of the tower.
The authors Chen and Georgakis (2013) performed an experimental analysis of a prototype 1/20-scale wind turbine tower model, equipped with an innovative passive tuned rolling-ball damper (TMD), to reduce the structural vibrations. During the shaking table tests, two accelerograms were applied at the base of the tower, equivalent to two different wind load cases: “Extreme Operating Gust” (EOG) is a sharp increase and then decrease in wind speed which occurs over a short period of time while the turbine is operating; “Parking” refers to the load occurring when the turbine is parked and thus subjected to high velocity wind buffeting. The same authors (2015) assumed the same shaking table facility and dynamic inputs to test the above scaled wind turbine model equipped with a spherical tuned liquid damper (TLD). Moreover, on the base of the experience of the authors in the implementation of magnetorheological (MR) devices within semi-active (SA) control systems, they proposed the development of a time-variant base restraint for wind turbines, consisting of elastic springs and SA MR dampers in parallel (Caterino et al. 2014, 2015, 2016). The three different control systems proposed by the authors are compared herein on the basis of the experimental results achieved at the Structural Dynamics Laboratory of the Denmark Technical University, to the aim of derive useful considerations for designing these structures in a cost effective way to reduce the wind induced growing structural demand.
2 Case Study Wind Turbine
Figure 1 illustrates the reference full-scale wind turbine for the three experimental campaigns compared in the proposed work. The tower is 102.4 m tall, made of Q345 steel (Young’s modulus of 206,000 MPa, Poisson ratio of 0.3, yield stress of 345 MPa), with a variable annular cross section with external diameter variable from 2.30 m (at the top) to 4.15 m (at the bottom). The tower body weights 3713 kN (including the flanges and internals), and the nacelle weights 1210 kN (including the rotor blades). For wind turbine towers, since the first vibration mode plays a dominant role in the dynamic analysis, Chen and Georgakis (2013, 2015) showed the dynamic equivalence of the case study structure with a generalized SDOF model. The tower was then simplified as a single degree of freedom system consisting in a tapered tubular cantilever beam with a concentrated mass at the top, representing the rotor and nacelle.

Structural model of the reference wind turbine. (dimensions in mm)
2.1 The Scaled Tower Model
A 1/20-scale model of the prototype structure has been manufactured in the laboratory and tested on shaking table (Caterino et al. 2016): it consists in a 5.12 m high vertical tube with constant cross section Φ133/4, chosen according to the principle of the equivalent lateral stiffness (133 mm and 4 mm are the external diameter and the thickness of the tube), and with a lumped mass placed at the top to simulate the influence of the nacelle and blades on the generalized mass.
The test model has been installed on the shaking table (Fig. 2), available at the Laboratory of Structures of the DTU, which consists in an aluminium platform of 1.5 × 1.5 m in plan. It is able to move in a single horizontal direction through a 100 kN hydraulic actuator.

Shaking table test setup. (dimensions in mm)
The base of the model practically is a rigid body that is connected to the center of the shaking table through a cylindrical steel hinge. At the beginning of the first experimental campaign, two force transducers have been set under the base of the test model to measure the base moment, while two accelerometers have been mounted to measure the absolute acceleration (one fixed on the top of the test model and the other one placed on the shaking table to monitor its motion). A laser displacement meter has been mounted on the shaking table to monitor its displacement. The data acquisition of the shaking table controller has been performed by using a real-time digital signal processor.
2.2 Equivalent Base Accelerations
During the three experimental campaigns, the tests have been carried out by applying to the shaking table different acceleration time histories, which have been defined by Chen and Georgakis (2013, 2015) using the wind turbine aeroelastic code HAWC2 (Horizontal Axis Wind turbine simulation Code, 2nd generation; Larsen and Hansen 2008) as the base inputs that would provide the same base moment and top mass response of the real fixed base structure subjected to the wind actions. Two considered load cases were: an extreme operating gust (EOG) occurring within a quick interval during turbine’s operation; a high velocity wind buffeting (“parking” - PRK) occurring after a controlled shut-down. The equivalent base acceleration time histories imposed to the table through the actuator during the dynamic tests, are shown in Fig. 3.

Equivalent base accelerations corresponding to wind load cases: (a) EOG; (b) Parking
3 Control Systems: TMD, TLD, SA
The authors have performed three experimental tests campaigns relative to the implementation of different control techniques: two of them were passive systems (TMD, TLD) the third was SA. The following section shows the main results of the experimental campaign that involved all the three control techniques.
3.1 Tuned Rolling-Ball Dampers
Chen and Georgakis (2013) proposed to place a tuned rolling-ball damper on the top of the nacelle: it was characterized by single or multiple steel balls rolling on the inside surface of a spherical container (Fig. 4). The choice of ball radius and sphere radius was dependent on the optimal frequency of oscillation of the roller ball. (Warburton and Ayorinde 1980) proposed the optimal design formulas for the TMD system under different types of loads, such as harmonic forces, wind loads, and seismic loads. As the structural damping of the wind turbine tower is very low, the above proposed formulas allowed to evaluate the optimal frequency and damping ratio of the TMD attached to the undamped SDOF system subject to random excitation. The damping effect of the passive rolling-ball damper depends on the fact that the rolling of balls delays the main structural response by a phase angle of 90°, so that the elastic force transmitted by the rolling balls acts like a viscous force on the main structure. The vibration energy of the structural system is dissipated through the relative displacement between the top of the tower and the steel balls when their rolling frequency is tuned to the natural frequency of the turbine. The rolling-ball damper was rigidly attached to the top of the test model by means of a wood frame (see photo in Fig. 4c). Five damper’s configurations were tested (Table 1): the first one consisted in a glass spherical container with one 4.1 kg steel ball inside (Fig. 4a); the others were characterized by two hemispherical containers with three to six 0.716 kg steel balls inside, respectively (Fig. 4b). The radiuses R of both the spherical and hemispherical containers were equal to 227 mm. A lubricant was used to reduce the rolling friction between the steel balls and the container.

Configurations including rolling-ball damper
Under EOG input, there was almost no vibration reduction in the first cycles of vibration, mainly because the mass of TMD needs sufficient time with the proper phase before it can effectively reduce the structural motion (Fig. 5). But, all tested dampers could significantly reduce the standard deviation of the response. TMD-A had the best behavior in terms of peak reduction of base moment (−1.2%) and top displacement (−0.9%), while TMD-E was able to produce the largest decrease of the standard deviations (−44%) for both base moment and top displacement, with respect to the configuration without TMD. Under the PRK load case, the time histories of the base moment in the controlled cases were effectively reduced except for the period from about 80 to 120 s, probably due to the possible mistuning effects induced by the small deviation of the natural frequency of TMDs from the optimal design value. All the dampers could reduce the peak values of the dynamic response to about 80% of those without TMD: TMD-C determined the highest reduction of peak base moment (−24%) and peak top displacement (−25%). At the same time, the standard deviation of the dynamic response was suppressed significantly in spite of the effect of slight mistuning: TMD-B produced the highest reduction (−35%) for both the considered response quantities. The time histories of base moments under the long PRK input are not shown because the shape of input doesn’t allow to clearly see the differences among the curves.

Time histories of base moments without and with TMD under the EOG input
3.2 Spherical Tuned Liquid Dampers
Chen and Georgakis (2015) applied to the same wind turbine model the spherical tuned liquid damper in Fig. 6. It consists of two-layer hemispherical containers partially filled with water, which is able to slosh when the structure is subjected to dynamic accelerations. The effectiveness of this passive TLD is maximized if the liquid sloshing frequency is properly tuned to the natural frequency of the structure’s vibration mode to be reduced. The TLD was rigidly mounted on the top of the model by means of the wood frame (Fig. 6). The plastic hemispherical containers were designed to have a radius of 227 mm and a wall thickness equal to 1 mm; the inside liquid was water with a density of 1000 kg/m3. The depth of water in each container varied from 48 mm to 74 mm. The fundamental sloshing frequencies corresponding to different depths of water are given in Table 2. The floating particles and the bottom nylon net were used to reduce the beat phenomenon and improved the TLD damping.

Configurations including spherical tuned liquid damper
Under EOG load case, there was almost no vibration reduction produced by the TLDs in the first cycles of vibration, mainly because the liquid in the containers needs sufficient dynamic with the proper phase before it can effectively suppress the structure’s motion (Fig. 7). Despite this, the dynamic responses with TLDs were suppressed rapidly. All TLDs could significantly reduce the standard deviation of the dynamic response although they could not reduce their peak values: TLD5 was characterized by the best peak reduction of base moment (−0.1%) and top displacement (−2.1%), and was able to determine the largest decrease of the standard deviations (−45%) with respect to the case without TMD. Under the PRK input, the time histories of the base moment with TLDs were effectively suppressed during the whole load process: all the dampers could reduce the peak values of the dynamic responses and, at the same time, their standard deviations. TLD5 produced the largest peak suppression (−35%) of those without TLD and the highest reduction of the standard deviations (−60%). It is worth to note that the experimental response in the case without control (Fig. 7) is a little bit different from that one shown in Fig. 5, due to small differences in the testing setup of the considered experimental campaigns.

Time histories of base moments without and with TLD under the EOG load case
3.3 Time-Variant Base Restraint
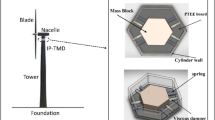
Caterino et al. (2014, 2015, 2016) focused on the realization of a time-variant restraint at the base of the tower model, consisting of elastic springs and SA MR dampers in parallel. The latters were driven in real time so as to change their mechanical behavior aiming at reducing the structural demand imposed to the tower. On both sides of the base, that is connected in the middle to the shaking table through a cylindrical steel hinge, one cylindrical spring (89 kN/m stiff) and one MR damper are installed, as shown in Fig. 8. The MR devices are two identical full-scale prototype dampers designed and manufactured by the German company Maurer Söhne. They can develop a maximum force of about 30 kN along the longitudinal axis, and have a stroke of ±25 mm. The current generated in the internal circuit is provided in the range 0÷3 A by a specific power supply. During a suitably designed promptness experimental tests, it was demonstrated that the response time of such type of SA MR damper can be bounded to 8–10 ms, when an adequate electric hardware is properly applied.

Configurations including time-variant base restraint
The position of sensors was different with respect to the previous passive control systems: the horizontal displacements of the shaking table were measured through one laser transducer; the displacements of the tower were registered by a laser transducer located at 2/3 of total height of the tower and fixed to an external wood stick; the axial displacements of springs were measured by a third laser transducer attached on the steel plate where the East side spring was installed (rotation of the base and axial dampers’ displacements were on-line derived directly starting from the above measures); two load cells mounted under each MR device allowed to measure their reacting force. A dedicated electronic equipment for acquisition and control has been used to drive the SA devices. It includes two operational power supplies able to provide the current needed to feed the circuitry inside the MR devices. A bang-bang control algorithm has been considered for semiactively controlling the wind turbine via MR dampers (Caterino et al. 2015, 2016). This controller switches back and forth from an “off” state (intensity of current i = 0) to an “on” state (i = imax = 1A) according to a given logic designed in order to reduce the stress at the base, even aiming to bound the top displacement demand within given limits. To do that, the algorithm assumes a limit value for both base stress and top displacement (σlim and xlim in the following, respectively).
Many tests have been performed with the above mentioned control algorithm under both types of base input, in order to evaluate and compare the effects, in terms of reduction of the structural response, of different couples of stress and displacement limits (σlim and xlim, respectively). The different configurations, i.e. couples of values (σlim, xlim), have been considered by varying the values of σlim and xlim in the intervals [10, 40] MPa and [16, 46] mm, respectively.
Under EOG load case, the optimal calibration for the assumed controller resulted to be the configuration SA (σlim = 30 MPa, xlim = 46 mm), leading to the maximum reduction of base stress (−29%) at the cost of a moderate increase of top displacement demand (+15%). Figure 9 shows the registration of base moments in case of the semiactive configuration, compared to the results of the fixed base test shown in Fig. 7 and the data recorded during the “passive ON” test carried out on the setup of Fig. 8 by feeding the MR dampers with a constant current equal to imax = 3A. Under the PRK input, the configuration SA (σlim = 12 MPa, xlim = 20 mm) resulted to be the best among the tests performed with the assumed control logic, both in terms of base stress suppression (−30%) and top displacement decrease (−11%).

Base moments without and with the SA control system under EOG input.
4 Comparison Among the Control Strategies
The following Table 3 compares the three control strategies in terms of capability of reducing the structural demand against the two load cases examined. Two configurations of the TMD have been selected for each load case. One is better for the higher reduction of the peak response, the other is better looking at the standard deviation of the response (that is in indirect measure of the fatigue phenomenon). For the TLD technique, the configuration TLD-5 resulted to be the best according to both criteria. For the SA strategy, where reduction of the peak response should be the first purpose, the configuration is that described in the previous section, and the standard deviation has not yet been assessed, it will be the subject of future work. However, it is worth noting that the reductions shown for the SA configuration in the following table are computed with respect to the “passive-ON”, not to the uncontrolled case.
Under a short input, pulse-like as EOG, both TMDs and TLD are only slightly able to reduce vibrations during the first strong cycles (around 1%). Actually, as known, such systems require a certain time to produce an effective suppression of the structural motion. Conversely, the SA control strategy is able to damp the response in the strong phase of such load case, causing a reduction of base moment up to 29%. However, the TMD and TLD techniques show the advantage of strongly reducing the fatigue demand and, above all, that of not causing significant change in the displacement demand in comparison with the uncontrolled configuration. The response of the semi-actively controlled system to the EOG load case instead is characterized by a significant increasing of the top displacement (15%) because, during a fast input like EOG, in correspondence of the stiffness reduction the displacement demand is significant and the system doesn’t have sufficient time to reduce it through damping. Figure 10 shows the comparison among the base moment time-histories under this load case.

Base moments measured during the best TMD, TLD and SA control systems
Different comments can be drawn looking at the performance of the three control systems against the longer, less impulsive PRK wind load. In this case, you can see that the three techniques lead about to the same reduction of bending moment demand. However the passive techniques result to be more able to reduce fatigue phenomenon and, above all, displacement demand, the latter even up to 35%. Finally, it is worth noting that the SA strategy also allows a reduction of top displacement demand. This reduction, while is smaller than the values registered for the passive cases, is still significant (11%), due to the amount of energy dissipated during the several cycles.
5 Conclusions
Three different control strategies have been proposed by the authors to reduce wind-induced vibrations of wind turbine towers. Two of them involve passive devices (TMD and TLD) mounted at the top of the structure. The third one mainly consists of semi-active dampers installed at the base of the tower and exploits the base rocking to dissipate energy. Three shaking table testing campaigns were carried out to assess the performance and potentialities of such technologies. Two strongly different load cases have been considered, the first shorter and impulsive (PRK), the second longer and almost stationary (PRK). Based on the results of all the tests, it can be conclude that:
-
against the EOG case, the TMDs and TLDs were not able to suppress the peak value of the dynamic response, however they reduced the standard deviation significantly; under the PRK wind load, instead, both standard deviation and peak value of the dynamic response resulted to be strongly reduced;
-
for the EOG load case, the MR SA control suppressed the peak value of the stress at the base of the tower, however with a moderate increase of the top displacement; for PRK load case, the SA system instead resulted to be able to significantly reduce both the dynamic responses.
In short, at least from the analyses conducted so far, it would seem that passive systems are able to reduce cyclic demand and are fail safe, in the sense that they rarely cause a worsening of the response compared to what would be of the uncontrolled system. In some cases, however, the reduction in response is very small.
On the other hand, the SA system results to always guarantee a significant reduction in the demand for the bending moment, even if, in case of impulsive actions, this can have as a side effect a significant increase in displacement at the top.
References
Caterino N, Georgakis CT, Trinchillo F, Occhiuzzi A (2014) A semi-active control system for wind turbines. In: Luo N, Vidal Y, Acho L (eds) Wind turbine control and monitoring (Advances in industrial control). Springer International Publishing Switzerland, ISBN 978-3-319-08412-1
Caterino N (2015) Semi-active control of a wind turbine via magnetorheological dampers. J Sound Vibr 345:1–17. https://doi.org/10.1016/j.jsv.2015.01.022
Caterino N, Georgakis CT, Spizzuoco M, Occhiuzzi A (2016) Design and calibration of a semi-active control logic to mitigate structural vibrations in wind turbines. Smart Struct Syst 18(1):75–92
Chen J, Georgakis CT (2013) Tuned rolling-ball dampers for vibration control in wind turbines. J Sound Vibr 332(21):5271–5282
Chen J, Georgakis CT (2015) Spherical tuned liquid damper for vibration control in wind turbines. J Vibr Control 12(10):1875–1885
Karimi HR, Zapateiro M, Luo N (2010) Semiactive vibration control of offshore wind turbine towers with tuned liquid column dampers using H∞ output feedback control. In: IEEE international conference on control applications, Yokohama, Japan
Kirkegaard H, Nielsen SRK, Poulsen BL, Andersen J, Pedersen LH, Pedersen BJ (2002) Semi-active vibration control of a wind turbine tower using an MR damper. In: Grundmann H, Schuëller GI (eds) Balkema Publishers, A.A./Taylor & Francis, Balkema/The Netherlands, pp 1575–1580
Lackner M, Rotea M (2011) Structural control of floating wind turbines. Mechatronics 21:704–719. https://doi.org/10.1016/j.mechatronics.2010.11.007
Larsen TJ, Hansen AM (2008) HAWC2 User Manual, Roskilde, Denmark: Risø National Laboratory, Technical University of Denmark
Luo N, Bottasso CL, Karimi HR, Zapateiro M (2011) Semiactive control for floating offshore wind turbines subject to aero-hydro dynamic loads. In: International conference on renewable energies and power quality, Las Palmas de Gran Canaria, Spain
Warburton GB, Ayorinde EO (1980) Optimum absorber parameters for simple systems. Earthq Eng Struct Dyn 8:197–217
Acknowledgements
The Denmark Technical University (DTU) of Copenhagen is gratefully acknowledged for having financed the experimental activity and for the laboratory equipment, with special thanks to prof. C.T. Georgakis. The authors would like to thank the financial support of China Scholarship Council. The MR dampers have been designed, manufactured and provided for free by Maurer Söhne (Munich, Germany) that is also acknowledged for the support.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Caterino, N., Georgakis, C.T., Spizzuoco, M., Chen, J. (2019). Mitigation of Structural Demand to Wind Turbines: Experimental Investigation of Three Control Strategies. In: Ricciardelli, F., Avossa, A. (eds) Proceedings of the XV Conference of the Italian Association for Wind Engineering. IN VENTO 2018. Lecture Notes in Civil Engineering, vol 27. Springer, Cham. https://doi.org/10.1007/978-3-030-12815-9_14
Download citation
DOI: https://doi.org/10.1007/978-3-030-12815-9_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-12814-2
Online ISBN: 978-3-030-12815-9
eBook Packages: EngineeringEngineering (R0)