
Abstract
Cassini launched in 1997 and completed its prime mission, its Equinox first extended mission, and its Solstice second extended mission. Since its arrival at Saturn in 2004, Cassini completed almost 300 orbits around the planet. Over the span of the mission, significant improvements were made to all the major satellites ephemeris and to Saturn gravitational and pole models. These improvements have enabled better trajectory reconstructions throughout the timeframe of the mission, although using about one hundred different models of the Saturn system. Now that the mission is over, the paper reports on the uniform reconstruction of the entire Cassini orbital mission, which uses one consistent Saturn system model and satellite ephemerides throughout. We discuss the challenges of undertaking this task and comparison strategies for choosing the best and greatest Cassini trajectory for its very final delivery.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

1 Introduction
Cassini spent almost twenty years in space, where thirteen of those years were to explore the Saturn system starting in July 2004. The trajectory was designed to explore the Saturn system, with a focus on its biggest moon Titan. After four years of nominal (Prime) mission, two extensions brought its operations to September 2017. The extended missions were named to correspond with the applicable season at Saturn.
The prime mission included forty-five flybys of Titan, four of Enceladus, and nine of other icy satellites. After the completion of the four-year prime tour in July 2008, when Huygens was released to Titan and Cassini’s trajectory went through Saturn’s magnetotail and completed orbits at higher inclination, NASA extended the mission until September 2010 [1].
The first extension, the Equinox mission, from July 2008 to September 2010 was focused on changes to the Saturnian system by the onset of equinox, on August 11, 2009. The Equinox mission added twenty-six Titan flybys and twelve more Enceladus and icy satellite flybys. By then, the uncertainty on Titan’s position was already only a few hundred meters while the uncertainties for Enceladus, Rhea, and Dione ephemerides were a few kilometers. The trajectory’s inclination gradually lowered over one and a half years, leading to an equatorial phase where numerous icy moon flybys could be performed. A few orbit inclination changes were included to fully map Titan’s surface using Cassini’s radar instrument [2].
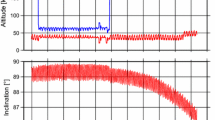
The Solstice mission, from 2010 to 2017, added forty-six Titan flybys, twelve Enceladus, and twelve other icy satellite flybys. Cassini came back to the equatorial plane and remained there until June 2012, then returned to higher inclinations in three different inclination phases that lasted three years, to come back to its last equatorial phase in 2016. Cassini’s orbit inclination then gradually increased for the Grand Finale. In the last ten months of the mission, the orbit period changed from nearly thirty-two days to about seven days or less. After the penultimate Titan flyby (T125), Cassini’s trajectory was altered such that it grazed the outer edge of the F-rings at twenty descending node crossings and then, after the final Titan flyby (T126), passed through the narrow gap between the D-ring and Saturn’s cloud tops every 6.4 days twenty-two times. In order to dispose of the spacecraft in accordance with NASA’s planetary protection requirements, the trajectory was designed so that the spacecraft would enter Saturn’s atmosphere on its final orbit and vaporize. This happened on September 15, 2017 [3]. The planet’s orientation in time with respect to the Sun is shown at the bottom of Fig. 1. Figure 1 also summarizes the satellite encounters throughout its prime and two extended missions. In total, Cassini targeted 163 satellite encounters.

Cassini mission science profile, 2004–2017 [3]
Cassini’s trajectory reconstructions are already publicly available on the NAIF Web site [4]; deliveries were usually made every few months. As the Saturn system and spacecraft error modeling were refined over the years, inputs to those reconstructions have also evolved over the years. In particular, they include different models for Saturn’s gravity, pole, and the ephemerides of ten of Saturn’s moons. The Cassini Navigation team received Saturn system models from the JPL Solar System Dynamics (SSD) group every six months on average. Throughout the thirteen years of the mission, one can find at least forty different models of the Saturn system used in the making of the Cassini trajectory reconstructions during operations. In addition, since navigating Cassini can also include refining the Saturn’s system model, the Navigation team also estimated the Saturn system from time to time in between SSD model upgrades. In total, the currently available reconstructions include more than one hundred different values for Saturn gravity harmonic coefficients, pole angles, and states of ten major satellites.
We worked closely with the SSD group to get the latest and greatest model of the giant planet and its satellites to provide a reconstructed trajectory for Cassini with a single uniform model. The uniform reconstruction needed to be done in three phases: first gather inputs, then build all trajectory reconstruction environments for defined time spans, and finally reconstruct all those. There have been many challenges in doing so. Besides ingesting thirteen years of data, the navigation process improved over time and got modernized through using a different navigation software. In the next sections, we detail the strategy used to undertake this uniform reconstruction task and explain the associated challenges. In the last section, we discuss analyses and results for the final reconstruction delivery made in June 2018, comparing this uniform reconstruction to the ones delivered during Cassini’s operational years.
2 Uniform Reconstruction Structure
2.1 Navigation Background
Cassini’s trajectory is one of the most complex trajectories ever flown. The reference trajectory was optimized for propellant consumption and satellite encounters to maximize science returns [1,2,3, 5]. The Navigation team’s task was to return the Cassini trajectory to the reference trajectory at the times of flybys, allowing deviations between encounters. This was performed in two steps: the orbit determination (OD) team estimated Cassini’s trajectory and related parameters, while the flight path control (Maneuver) team designed the orbit trim maneuvers (OTM) to meet flyby times and geometry. The OD team’s activities covered trajectory error analysis for upcoming operations through reconstructing past trajectories for spacecraft calibrations and science investigations.
Cassini’s navigation structure focused on two flybys at a time where the time span was referred to as an “arc”. To give some background, an example “arc” is illustrated in Fig. 2. In this figure, the black line represents the main arc, revYFB2, starting at the Saturn apoapse prior to the first satellite flyby (the nth revolution around Saturn, named revY here, and flyby number 1, or FB1) and ending after the maneuver following the second flyby (FB2 in figure). Three maneuvers were usually designed in between two encounters; the first two maneuvers following the first encounter were deterministic, with nonzero delta-Vs in the reference trajectory, while the third one was statistical to clean up errors prior to a given flyby. The overlaps between arcs provided some validation during operations (green and black lines overlapping or black and red lines overlapping in Fig. 2). The reconstruction deliveries started at the arc epoch and ended at the next arc epoch, without overlap.

Navigation arc definition
A number of papers have been published to describe the workings and performances of both the OD and Maneuver teams [6,7,8,9,10,11]. During operations, on the OD side, the software suite was built to gather and build the required inputs for a new arc. Then, another set of scripts would take care of the data fitting and parameter estimations over the time span of the arc. As tracking data came in, usually Doppler and range, the spacecraft and dynamical environment were updated and the Cassini trajectory propagated so that predictions and observations could be compared. Optical images were also used to refine our overall knowledge of Saturn’s pole, gravitational field, and major satellite ephemerides. A linearized least-square filter was used to estimate selected spacecraft and Saturn’s system parameters. Other parameters such as the Saturn ephemeris and Earth platform parameters were not estimated but included as consider parameters to account for their uncertainties. For most parameters, a priori values were constrained from the previous arc. The estimation process was used with iterations to manage nonlinearities. This operational approach served as the basis for the uniform reconstruction strategy, with a degree of automation highly desired for time saving.
During the mission, Saturn gravitational harmonic coefficients, pole angles, and satellites’ states were estimated for certain periods of time. Figure 3 shows the evolution of the Saturn’s pole right ascension since Tc (end of 2004). This variation is representative of many Saturn system parameters estimated across the mission. Note that Saturn’s right ascension uncertainty is not shown as it is in the third digit or smaller. Earlier Saturn models used included larger uncertainties. For instance, Titan’s uncertainties reduced from near 200 km to less than 5 km by Tc. With the mission done, using a single-uniform Saturn model can be achieved which eliminates Saturn parameters’ variations and includes uniform uncertainties throughout the mission.

Saturn pole right ascension angle in degrees in time, with values taken at epoch January 1, 2010, from Saturn models delivered throughout the mission by the JPL SSD group. Note that Saturn’s declination has a much smaller variation
In total, 172 arcs were delivered during the mission. One of the requests for the uniform reconstruction was to keep the same epochs as the previous delivered reconstructions during the mission. As a result, time allowed implementing the “arc” operational approach for the uniform reconstruction. It would also make comparisons with existing Cassini trajectories easier since each would reconstruct the same time span.
The epoch chosen for this full mission reconstruction is just after Saturn Orbit Insertion (SOI), on July 1, 2004 14:00 ET. The end time includes the last data received from the spacecraft just before its disintegration into Saturn atmosphere on September 15, 2017 11:54 ET. For the uniform reconstruction effort, we were able to reduce the number of arcs to 157 as some of the previous deliveries were made for every Saturn revolution until the OD team became confident fits could be obtained for many empty revolutions (i.e. without any satellite flybys). As described in the next section, the uniform reconstruction was ninety percent automated, and the time necessary for an end-to-end reconstruction was about 160 h.
2.2 Inputs Preparation
One particular challenge for re-reconstructing the mission was the use of two different software sets. In 2012, Cassini’s navigation efforts transitioned from the legacy Orbit Determination Program (ODP) [12] to the new Python-based Mission Analysis, Operations, and Navigation Toolkit Environment (MONTE) developed at JPL [13]. The Navigation team performed parallel operations for almost three years before making the transition, from Spring 2009 to mid-January 2012. The transition happened during a “downtime” toward the end of almost two years of distant Titan flybys, and about ten flybys of Enceladus and other icy moons (from July 2010 to May 2012). Although invisible to the end users of Cassini’s trajectory, the T80 reconstruction was done with ODP, followed by T81 in MONTE.
This extended experiment and testing phase gave confidence in the conversion and process implementation, and the legacy ODP was quickly dropped after the formal transition. Although this change modernized Cassini’s navigation, it also meant all inputs from 2004 to 2012 needed to be converted into MONTE format; this had not been done during the parallel testing or since the transition. In addition, all arcs for that period of time needed to be organized with the appropriate structure so that precise orbit determination could be performed in MONTE. We discuss some of that data conversion below.
The amount of Cassini data cannot be overstated. Over the thirteen years at Saturn, the spacecraft flew by a satellite, most often Titan, about once every month, and executed 360 maneuvers, out of 492 maneuvers designed, or about two and a half per month on average. This also means thirteen years and almost three months of data to ingest. Some inputs needed to be assembled, while others had to be converted in the appropriate format and distributed to each arc. Table 1 gives a feel of the navigation data volume along with the conversion required prior to starting the uniform reconstruction itself. We detail each of those inputs below.
The tracking data, ionospheric and tropospheric calibrations, and Earth orientation parameter (EOP) files were the easiest to work with. All those files had been saved, and MONTE has direct format conversion commands available. Simple short scripts were used to convert and merge all the required files. The tracking file is 530 MB in size, containing radiometric data for nearly 5000 tracks using the Deep Space Network (DSN). Each of those tracks includes an average of 6 h of coherent Doppler data every 60 s and range integrated over 5 min.
Data edits for all arcs had to be merged; this was critical in speeding up the reconstruction process and allowing a smooth automated process. Without these, manual iterations and edits would be needed for 157 arcs; this means checking for corrupted data points five to ten times during a single arc reconstruction. These edits had been recorded during operations to remove or ignore either bad data or biased data due to various antenna manipulations and dynamical mis-modeling. Although part of those edits needed to be fetched from the legacy arcs, MONTE already has a conversion command for those inputs. Hence, this produced a merged file of about 10,000 edits.
Optical pictures used in navigation (opnavs) totaled more than 2200 post-SOI. Most of those navigation pictures were obtained early in the mission for science investigations, and Saturn and satellites’ ephemerides estimation. The Picture Sequence File (PSF) is the text file used in mission operations containing information on the spacecraft camera, the camera pointing, and the time and location of objects in a picture. Cassini’s PSF includes 164 pictures of Titan during the prime mission and none in the two extended missions. Enceladus and most of other large icy satellites were imaged 100–200 times in the prime mission, then about half during the Equinox mission, and only a dozen times during the Solstice mission. By the end of the prime mission, optical navigation was mainly used to maintain knowledge of the Saturn’s satellite ephemerides, with a few exceptions for particular encounters of interest [14, 15]. Unlike the radiometric data, opnavs were already merged, and the star catalog just needed to be updated. Since the uniform reconstruction is using a single Saturn system model, the opnavs were not to be used in the overall estimation. However, we looked at possible biases in the optical observations over the mission timeline, discussed in Sect. 3.
The most time-intensive task was remaking the small forces files, where the small reaction control subsystem (RCS) thrusters were used to adjust the spacecraft’s orientation for science observation or momentum management (but not for the OTM), and the acceleration models for satellite flybys where thrusting was used to maintain or adjust the attitude. Each arc points to the corresponding “rcs_dv” file including all small thrusting for the arc span. A uniform error model was also required throughout: 0.5 mm/s uncertainty for all thrusting relying on telemetry and not visible in the Doppler signature, and 0.25 mm/s for momentum management using less than 1 mm/s. Those small forces not on Earth line were rare in the prime mission, but became common by the Solstice mission, making for almost all of the small spacecraft events by the Grand Finale. The default uncertainty was set to 1.2 mm/s for all other events; since those were on Earth line and thus visible in the tracking data, the least-square estimation reduces their uncertainty to less than 0.1 mm/s usually.
About eighty satellite encounters had been performed in RCS mode to maintain attitude during close approach. This was usually done for Titan encounters at less than 1200 km altitude, then modified to 1300 km altitude later in the mission, in order to counter the effect of Titan’s upper atmosphere. Instead of inputting potentially hundreds of small burns during a given encounter, an acceleration profile was used from the predicted and then telemetered encounter. The telemetry was queried again and reprocessed for ingestion in the appropriate software language. Three different servers needed to be used in the telemetry queries over the entire mission. A few flybys had telemetry missing due to various reasons, but documented enough to be repaired.
The OD team had implemented the RCS updater script to also refresh attitude files when used. As all the RCS files were being built, the newest predicted c-kernel attitude files were being updated for appropriate sequences. Cassini had already adopted a philosophy to not use reconstructed attitudes since the differences with the predicted ones were negligible. Hence, all reconstructions are done with latest predicted attitude files, besides adding reconstructed attitudes for two safing events: September 11, 2007 and November 2, 2010. The first safing occurred after the 1648 km Iapetus flyby. The second safing was caused by corrupted files. During safing, the spacecraft was to turn off all non-necessary power loads, turn to a Sun-pointed attitude and switch communication to the low-gain antenna.
2.3 Uniform Reconstruction Tool
With 157 arcs to reconstruct, automation becomes critical. The main requirements are to:
-
(1)
Set a given arc with appropriate inputs for the arc time span, including the spacecraft states and covariance at epoch mapped from the previous arc.
-
(2)
Once this is achieved, estimate spacecraft parameters.
-
(3)
Do this for 157 arcs, and allow reruns while keeping local modifications.
For satisfying (3), a function was implemented to prevent rewriting a given arc directory and only update the spacecraft states and errors from the previous arc. Hence, if all arcs were reconstructed but a random one required to be edited, the user could re-reconstruct it again, and then continue on (as one arc feeds the following one).
The OD software was reused as much as possible and wrapped over the Cassini arc database. This resulted in an “auto_recon” script, where the workings of the tool are schematized in Fig. 4. In this figure, the “start” position assumes inputs have been converted and assembled. The tool loops through an OD arc database to fetch arc names, epochs, and end times, and records the next arc name and epoch for appropriate spacecraft state mapping. At the same time, the satellite encounters along with the maneuvers encompassing the arc are identified. Their respective event times are recorded and stored as data cutoffs for later use. Finally, the RCS file and appropriate sequence attitude files are listed. After this arc initialization or “advance_arc init” in Fig. 4, the main configuration “Options” file is built, pointing to paths of appropriate inputs. Among those, the Saturn system model files, tracking files, Earth parameters and calibrations files, data edits and weights, and RCS flybys’ acceleration models are brought in. The states, radioisotope thermoelectric generator heat (RTG), attitude, filter setup, and mappings files are placed in a local inputs folder. This is done in “advance_arc final” in Fig. 4.
By this point, the first data fit is ready to be started. In “odfit”, the trajectory is propagated from the spacecraft states at epoch and the force model from inputs described above. The raw observables are read (Doppler and range), and the computed observables are generated from the integrated trajectory. The navigation filter then performs the least-square estimation of parameters indicated in the off-white box at the bottom of Fig. 4. We list estimated and consider parameters with their uncertainty in Table 2. The process is then reiterated through data cutoff updates until the end of an arc, until convergence (“iter” loop in Fig. 4).

Automated uniform reconstruction tool diagram
Once a solution is converged, the next step is to verify the newly reconstructed Cassini trajectory against the existing delivered one and resolve any potential issues; if the position and velocity differences are too large, something must have gone wrong. As the auto_recon tool runs, this verification can be done for multiple arcs at a time, if not the entire reconstructed mission. A number of them needed to be reworked as the position and velocity differences were too large; a position difference above a few tens of kilometers at arc epoch is suspicious. Most often, bad radiometric data was throwing off the trajectory fit: safings were first forgotten, some data cutoffs were too distant for the arc to converge, some RCS turns prior to Tc had been modeled through non-gravitational accelerations instead and thus not listed in the usual files, and random other errors occurred. In some cases, the second or third arc following a corrupted one had recovered, and the automated process could continue.
Hence, after all 157 arcs are built and converged, the reconstruction could be rerun with all necessary fixes by only updating the state and associated covariance from the previous arc. While this doesn’t save much processing time, it allowed saving particular setup and edits for specific arcs that needed more care or needed uncommon changes.
3 Analyses and Results
Two different Saturn system models were investigated for comparison, although the plan for the uniform reconstruction included delivering a single uniform Saturn system for the Cassini trajectory reconstruction. The selected mission trajectories were published on the NAIF Web site in June 2018 [4]. Comparisons between those solutions include trajectory differences against the existing trajectories, trajectory differences at arc epochs for the newly reconstructed solutions, estimates of OTMs, and pass thru of optical navigation pictures against those trajectories.
The Saturn models compared included:
-
The latest Saturn’s model update delivered and used by the Cassini Navigation team in operations called sat389.
-
The best and greatest Saturn system model from the SSD group to date, sat409, received in April 2018.
The delivered uniform reconstruction used sat409.
We expected higher position and velocity deviations from original reconstructions at the beginning of Tour since earlier Saturn models had more uncertainties. Looking at the uniform reconstruction using sat409, the maximum positions differences along arcs are less than 50 km until Tb in December 2004, less than 11.5 km for the rest of the tour, and between 12 and 15 km during Cassini’s Grand Finale (April to September 2017). We note that most of these trajectory discrepancies occur at Saturn apoapses, the farthest distance from Saturn during a given Cassini orbit.
To differentiate between the two cases listed above, the trajectory differences at the arc epoch between two adjacent trajectories give indications of overall reconstruction convergence. Figure 5 shows the Cassini position state differences at each arc epoch (numbered from 1 to 157) in kilometers, for the reconstructed trajectories using Saturn’s sat409 (blue) and for the delivered ones during operations (gray). Those trajectory differences at arc epochs are noticeably larger for the case of sat409 compared to the original deliveries. This is likely due to an increase overall error when fitting the Cassini trajectory but not the usual parameters of the Saturn systems (as was done during operations); local misfits corrected by estimating the Saturn system from arc to arc are now left in the Cassini trajectory estimation.

Trajectory position differences at each arc epoch, in kilometers, between two adjacent trajectories
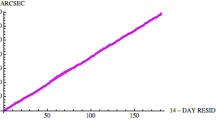
Finally, since the Saturn system is not estimated, any corrections coming from satellites’ mis-modeling seen through the opnavs would go toward the spacecraft parameters’ estimations. Looking at the computed image observables against the raw observables without filter corrections, or “pass thrus”, can help find biases in Saturn’s satellites positions or their center-finding techniques. Figure 6 shows pass thrus of optical navigation pictures against the delivered reconstructions using sat409 for Titan, Enceladus, Dione, Tethys, Rhea, and Mimas, where residuals are shown for pixel and line locations, the vertical and horizontal axes of an image, respectively. We note a bias in Titan’s residuals, shown by the magenta dots in the lower figure (line residuals). This bias likely corresponds to difficulties in its center-finding due to the presence of its thick atmosphere.Footnote 1 The uniform reconstruction using sat389 shows the same trend with some larger outliers for Enceladus and Dione. This will inform future mission strategies in using optical navigation and autonomous navigation systems.

Optical navigation residuals for Titan, Enceladus, and Dione, with pixel residuals shown on top and line residuals shown in the lower figure
4 Conclusion
The Cassini mission has been providing unique data to the scientific communities for the last two decades, and the spacecraft disposal in Saturn’s atmosphere in September 2017 will be a topic of research for likely another decade. Although trajectory reconstructions are currently publicly available, this uniform reconstruction work will satisfy a need for a uniform reconstruction using a single uniform model of the Saturn pole, gravitational field, and its satellite ephemerides. This will allow utmost science analyses of instrument data obtained throughout the mission.
The uniform reconstruction using the Saturn system model called sat409 show a general agreement with delivered reconstructions made during operations. We also observe a bias in Titan’s observations which indicates the difficulty in center-finding techniques for body with an atmosphere. The Cassini uniform reconstruction was delivered in June 2018 and is published through the NAIF Web site.
Notes
- 1.
From personal communication with Dr. William Owen at JPL, optical navigation leads on Cassini.
References
Cassini Navigation Plan, Technical Report 699-101 Update, D-11621, JPL, August 2003.
Cassini Extended Mission Navigation Plan, Technical Report 699-101 Update, D-11621, JPL, March 2008.
Cassini Solstice Mission Navigation Plan, JPL Internal Document D-11621, 2010.
Cassini NAIF website, https://naif.jpl.nasa.gov/pub/naif/CASSINI/kernels/spk/.
Buffington, B., Smith, J., Petropoulos, A., Pelletier, F., & Jones, J. (2010). Proposed end-of-mission for the Cassini Spacecraft: Inner D ring ballistic Saturn impact. In 61st International Astronautical Congress, Prague CZ.
Antreasian, P. G., Ardalan, S. M., Bordi, J. J., Criddle, K. E., Ionasescu, R., Jacobson, R. A., et al. (2008). Cassini orbit determination results: January 2006—End of prime mission. In AIAA/AAS Astrodynamics Specialist Conference and Exhibit, AIAA 2008-6747.
Pelletier, F. J., Antreasian, P., Ardalan, S. M., Buffington, B., Criddle, K., & Ionasescu, R. (2012). Cassini orbit determination performance (July 2008–December 2011). In SpaceOps 2012 Conference Proceedings, Col 1, p. 167.
Bellerose, J., Nandi, S., Roth, D., Tarzi, Z., Boone, D., Criddle, K., & Ionasescu, R. (2016). Cassini navigation: The road to consistent sub-kilometer accuracy satellite encounters. In AAS Guidance and Control, AAS16-142.
Vaquero, M., Hahn, Y., Stumpf, P., Valerino, P., Wagner, S., & Wong, M. (2014). Cassini Maneuver experience for the fourth year of the solstice mission. In AIAA/AAS Astrodynamics Specialist Conference, AIAA 2014-4348.
Vaquero, M., Hahn, Y., Hernandez, S., Laipert, F., Valerino, P., & Wagner, S. (2018). Flying Cassini through the grand finale orbits: Prediction versus reality. In AAS Guidance and Control, AAS18-151.
Wagner, S. V. (2016). Cassini Maneuver performance assessment and execution-error modeling through 2015. In AAS/AIAA Space Flight Mechanics Meeting, AAS 16-305.
Panagiotacoupulos, N. D., Zielenbach, J. W., & Duesing, R. W. (1974). An Introduction to JPL’s orbit determination program. Technical report 1846-37, JPL.
JPL’s MONTE, mission analysis, operations, and navigation toolkit environment. URL https://montepy.jpl.nasa.gov/.
Criddle, K., Bellerose, J., Boone, D., Ionasescu, R., Owen, W., Roth, D., & Tarzi, Z. (2017). Optical navigation during Cassini’s Solstice mission. In AAS 17-625.
Bellerose, J., Roth, D., Boone, D., Tarzi, Z., Ionasescu, R., & Criddle, K. (2018). Cassini orbit determination operations through the final titan flybys and the mission grand finale (February 2016–September 2017). In AAS 18-152.
Acknowledgements
The whole Cassini Navigation team should get credit for the work highlighted here. The authors also wish to thank Dr. Shyam Bhaskaran for generating the residual plot shown in Fig. 6, and Dr. William Folkner, and Dr. Robert Jacobson for providing Saturn system ephemerides and gravity products. Additional appreciation goes to the Spacecraft team, particularly the Attitude and Articulation Control Subsystem team, for their constant support. The Cassini mission is operated out of the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Bellerose, J., Roth, D., Tarzi, Z., Wagner, S. (2019). The Cassini Mission: Reconstructing Thirteen Years of the Most Complex Gravity-Assist Trajectory Flown to Date. In: Pasquier, H., Cruzen, C., Schmidhuber, M., Lee, Y. (eds) Space Operations: Inspiring Humankind's Future. Springer, Cham. https://doi.org/10.1007/978-3-030-11536-4_22
Download citation
DOI: https://doi.org/10.1007/978-3-030-11536-4_22
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-11535-7
Online ISBN: 978-3-030-11536-4
eBook Packages: EngineeringEngineering (R0)