
Abstract
The rapid growth of wearable robots in the last decade requires tackling practical issues that arise from their daily use, among which comfort is of great importance. In this work we quantify the level of comfort of a soft exosuit for the elbow by measuring the distribution of pressures at its interface with the human body. We do so with five different cushioning materials, commonly used in sport equipment and orthoses, and identify the ones exhibiting lower peaks of pressure. Polyethylene sponge and neoprene result in the best padding.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
“It is extraordinary to me that the most mature and old technology in the human timeline, the shoe, still gives us blisters. How can this be? We have no idea how to attach things to our bodies.” [1]. These words clearly point out a critical yet underrated issue in wearable robots: designing a comfortable mechanical interface between the device and its wearer.
As the field of wearable robots rapidly grows and assistive devices promise to soon become part of our daily lives, it is key to face the challenge of finding a comfortable mechanical means to attach robots to the human body. This is all the more important for devices intended for users with sensory impairment, where the lack of feedback could lead to pressure ulcers or local blood flow obstruction.
Extensive research exists on the assessment and optimisation of the design of prosthetic sockets [2]; comfort is strongly correlated with the magnitude of pressure peaks and shear forces at the interface between the socket and the skin, although various other factors, such as temperature and perspiration, can play a role.
Significantly less work exists for exoskeletons. De Rossi et al. proposed an apparatus to monitor the distribution of pressure at the human-robot interface of a lower-limb exoskeleton during gait training [3]. Using a similar approach, Levesque et al. identified areas exhibiting peaks of pressure on the attachment points of an active orthosis for gait assistance [4]; their findings suggest that the distribution of pressure is affected more by the stiffness of the padding material than by its thickness.
This data-driven approach to guide design choices is a promising path: Quinlivan et al. used the same paradigm to optimise the topology and material composition of the attachment points of a soft exosuit for the lower limbs [5]. This work highlighted the importance of the geometry of the interface (larger areas lead to higher comfort) as well as advising the use of fabric materials that better conform to the human body.
Being for exoskeletons or exosuits, materials such as neoprene or polyethilene (PE) sponge are common choices for cushioning the human-robot interface, yet there is no data-supported knowledge to justify the choice of one over others. In this work, we evaluate the pressure distribution between the skin and the anchor points of a soft exosuit for different cushioning materials. We test foams and rubbers commonly used for padding sports equipment and orthoses and quantify their comfort by measuring peaks of pressure at the interface with the skin.

Photography by  Stefano Mazzoni.
Stefano Mazzoni.
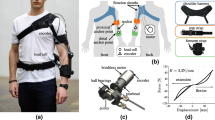
The soft exosuit for assistance of the elbow joint. Pressure distribution measures were taken at the interface between the distal strap and the skin.

Evaluation of pressure distribution at the human-suit interface of the distal anchor point (shown in Fig. 1) in the worst-case scenario (forearm perpendicular to gravity). (a) Examples of pressure mapping on the forearm using nitrile foam and polyethylene (PE) sponge, respectively being the worst and best scenarios among the tested materials. (b) Peak pressure at the human-suit interface. Opaque dots show the mean over repetitions. Neoprene and PE sponge result in the lowest peaks.
2 Methods
The exosuit for assistance of the elbow joint consists of three wearable components, highlighted in Fig. 1, and an electric motor (Maxon EC-i 40, 70W, 55:1 reduction), driving a pair of tendons to assist in both flexion and extension of the joint. The two tendons, routed through a Bowden sheath to the elbow, are attached on both side of the joint to mimic the biceps brachii and the triceps muscles. The suit is equipped with a load cell (Futek LCM300) in series with the flexing tendon and an absolute encoder to monitor the elbow’s position.
When the tendons are tensioned to apply a torque on the elbow, the proximal and distal strap tend to migrate towards the center of the joint. To reduce the amount of movement, the proximal strap is connected via inextensible fabric to a harness that redistributes forces on the torso; the large contact area with the body ensures a comfortable wear. The distal strap is where the highest pressures are applied, hence where cushioning properties of different materials will be more evident.
The distribution of pressure around the forearm was acquired using a pressure mat (NexGen Ergonomics, BT5010, 28 cm \(\times \) 28 cm) consisting of an array of 256 pressure sensors, sampled at 100 Hz. The pressure mat was wrapped around the surface of the forearm and secured using double-sided tape to prevent displacement. One subject was asked to performed three sessions of three flexion/extension movements between \({0}^{\circ }\) and \({90}^{\circ }\) (\({0}^{\circ }\) being full extension) with the arm fixed on the side of the trunk, doffing and donning the exosuit between sessions. This was done for each of the five materials listed in Fig. 2b: each material was cut in a 3mm-thick layer and used to line the internal surface of the distal strap. The exosuit provided an assistance equal and opposite to gravity, running the gravity-compensation algorithm described in [6].
3 Results and Conclusions
Unsurprisingly, the highest peaks in pressure were found when the elbow was flexed at \({90}^{\circ }\), i.e. when the component of gravity acting on the arm reaches its maximum value, on the posterior side of the forearm. Figure 2a shows the distribution of pressure in this configuration when the distal strap was lined with nitrile foam (top) and with polyethylene sponge (bottom), the former showing higher peaks and a less homogeneous distribution. Figure 2b shows the peak values of pressure for each of the nine repetition (transparent dots) and the mean over repetitions (opaque dots). PE sponge is the material exhibiting the best behaviour while rubber-based materials showed higher local peaks of pressure.
It is worth noting that obtained pressure profiles were due to the subject’s weight only; it would be interesting to examine how they vary as the wearer lifts extra load. Moreover, a more thorough study to measure comfort would include an estimate of shear forces on the skin and examine how the force profiles change across subjects with different muscle tone. This data, correlated with physiological measures such as subcutaneous blood flow, could be used to drive the design of optimal interfaces for wearable robots and would provide interesting insights on their usability in daily life scenarios.
References
Herr, H.: The new bionics that let us run, climb and dance. TED, Lect. (2014)
Mak, F., Zhang, M., Boone, D.: State-of-the-art research in lower-limb prosthetic biomechanics-socket interface: a review. J. Rehabil. Res. Dev. 38(2), 161–174 (2001)
de Rossi, S.M.M., Vitiello, N., Lenzi, T., Ronsse, R., Koopman, B., Persichetti, A., Vecchi, F., Ijspeert, A.J., van der Kooij, H., Carrozza, M.C.: Sensing pressure distribution on a lower-limb exoskeleton physical human-machine interface. Sensors 11(1), 207–227 (2011)
Levesque, L., Pardoel, S., Lovrenovic, Z., Doumit, M.: Experimental comfort assessment of an active exoskeleton interface. In: IEEE 5th International Symposium on Robotic Intelligence Sensors, Ottawa, October 2017
Quinlivan, B., Asbeck, A.T., Wagner, D., Ranzani, T., Russo, S., Walsh, C.J.: Force transfer characterization of a soft exosuit for gait assistance. In: A 39th Mechanical Robotic Conference, vol. 5, pp. 1327–1334 (2015)
Chiaradia, D., Xiloyannis, M., Antuvan, C.W., Frisoli, A., Masia, L.: Design and embedded control of a soft elbow exosuit. In: Proceedings of IEEE International Conference on Soft Robotic, Livorno, Italy (2018, in press)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Xiloyannis, M., Chiaradia, D., Frisoli, A., Masia, L. (2019). Characterisation of Pressure Distribution at the Interface of a Soft Exosuit: Towards a More Comfortable Wear. In: Carrozza, M., Micera, S., Pons, J. (eds) Wearable Robotics: Challenges and Trends. WeRob 2018. Biosystems & Biorobotics, vol 22. Springer, Cham. https://doi.org/10.1007/978-3-030-01887-0_7
Download citation
DOI: https://doi.org/10.1007/978-3-030-01887-0_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01886-3
Online ISBN: 978-3-030-01887-0
eBook Packages: EngineeringEngineering (R0)