
Abstract
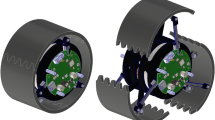
This paper contributes to a mechanical/kinematical design of a stair climbing robot. Based on the known Klann-mechanism, an extended re-configurable mechanism is proposed, in order to address the stair climbing problem. Steps offer a great variety of occurrences, since they differ in height, width or step length. Regarding staircases the variety is even higher since they differ in the number of steps per level, the size of the platform, the orientation etc. Due to these variations the concept proposes a re-configurable design, which is tested in simulation and in a real physical setup.
M. Strand—This work was supported Baden-Wuerttemberg Cooperative State University Karlsruhe.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Hong, H., Kim, D., Kim, J., Oh, J., Kim, H.S.: A locomotive strategy for a stair-climbing mobile platform based on a new contact angle estimation. In: IEEE International Conference on Robotics and Automation (ICRA) (2013)
Turlapati, S.H., Shah, M., Teja, S.P., Siravuru, A., Shah, S.V., Krishna, M.: Stair climbing using a compliant modular robot. In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2015)
Sun, Y., Yang, Y., Ma, S., Pu, H.: Modeling paddle-aided stairclimbing for a mobile robot based on eccentric paddle mechanism. In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2015)
Takaki, T., Aoyama, T., Ishii, I.: Development of inverted pendulum robot capable of climbing stairs using planetary wheel mechanism. In: 2013 IEEE International Conference on Robotics and Automation (2013)
Adiwahono, A.H., Saputra, B., Chang, T.W., Yong, Z.X.: Autonomous stair identification, climbing, and descending for tracked robots. In: 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV) (2014)
Yu, S., Li, X., Wang, T., Yao, C.: Dynamic analysis for stairclimbing of a new-style wheelchair robot. In: 2010 Chinese Control and Decision Conference (2010)
Zhang, Q., Ge, S.S., Tao, P.Y.: Autonomous stair climbing for mobile tracked robot. In: 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics (2011)
Moore, E.Z., Campbell, D., Grimminger, F., Buehler, M.: Reliable stair climbing in the simple hexapod ‘Rhex’. In: IEEE International Conference on Robotics and Automation (ICRA) (2002)
Arikawa, K., Hirose, S.: Mechanical design of walking machines. Philos. Trans. R. Soc. A 365, 171–183 (2007)
Liu, C., Su, N., Lin, M., Pai, T.: A multi-legged biomimetic stair climbing robot with human foot trajectory. In: 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO) (2015)
Nansai, S., Rojas, N., Elara, M.R., Sosa, R.: Exploration of adaptive gait patterns with a reconfigurable linkage mechanism. In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (2013)
Sheba, J.K., Martinez-Garcia, E., Elara, M.R., Tan-Phuc, L.: Synchronization and stability analysis of quadruped based on reconfigurable Klann mechanism. In: 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV) (2014)
Sheba, J.K., Martinez-Garcia, E., Elara, M.R., Tan-Phuc, L.: Design and evaluation of reconfigurable Klann mechanism based four legged walking robot. In: 2015 10th International Conference on Information, Communications and Signal Processing (ICICS) (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Labib, O.EF.E., El-Safty, S.W., Mueller, S., Haalboom, T., Strand, M. (2019). Towards a Stair Climbing Robot System Based on a Re-configurable Linkage Mechanism. In: Strand, M., Dillmann, R., Menegatti, E., Ghidoni, S. (eds) Intelligent Autonomous Systems 15. IAS 2018. Advances in Intelligent Systems and Computing, vol 867. Springer, Cham. https://doi.org/10.1007/978-3-030-01370-7_22
Download citation
DOI: https://doi.org/10.1007/978-3-030-01370-7_22
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01369-1
Online ISBN: 978-3-030-01370-7
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)