
Abstract
Industry is experiencing a new evolution phase where manufacturing is going through a process of digitalization, with every step of the production chain becoming smart. The emergence of IoT technologies and the fasted-paced evolution in advanced computing capabilities enable a pervasive monitoring and rapid data processing, unleashing new applications, e.g., real-time error-correction and fault-detection, remote robot control, intelligent logistics. The flexibility and low cost of wireless solutions makes them appealing with respect to wired connections, but current wireless technologies operate at sub-6-GHz bands and are not able to meet the reliability, latency, and data rate demands of novel applications. In this paper, we give an overview of the main limits of current technologies and discuss the role that mmWaves may play in guaranteeing ultra reliable and low latency wireless communication in smart industry. We especially focus on the IEEE 802.11ad and 802.11ay standards for communication at 60 GHz. A factory work-cell is used as an illustrative example to explore the potential of mmWaves and how they could contribute to the realization of a resilient smart factory.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The explosion of the Internet of Things (IoT) may lead to a major breakthrough in industries: the capillary deployment of sensors, coupled with advanced analytics capabilities, can enable automatized and flexible processes that can be monitored in real time, reducing production and maintenance costs and unproductive downtime. Production processes have been constantly changing towards an increasingly automatized profile, with some milestones, i.e., mechanization, mass production, and computerization, that are commonly known as industrial revolutions 1, 2 and 3 [1]. The fourth revolution, Industry 4.0, is not related to the introduction of disruptive technologies, but rather to the digitalization of the manufacturing sector, with the ultimate goal of optimizing existing operations and creating the so-called smart factory. Key enablers of Industry 4.0 are big data analytics, machine learning, cloud computing, robotics, and artificial intelligence [1]. Manufacturing systems go beyond simple connectivity, and use the collected information to drive further intelligent actions and meet the demands for higher productivity, green production, higher market share and flexibility.
Communication is a major component of Industry 4.0: it enables the connectivity between the devices and a continuous exchange of data that can be used to make the production process smart, flexible and adaptive. Wired technologies have been used for decades in industry but there is a growing interest in the deployment of wireless solutions, because they are much easier to install, upgrade and reconfigure. While several wireless technologies are available, their adoption in industry is still hindered by key technical challenges, including communication reliability and timeliness, security, interoperability and energy sustainability, and by the presence of proprietary and fragmented solutions [2]. New communication technologies could enable pervasive and continuous feedback inside the industry environments, allowing to achieve new industrial automation capabilities, such as intelligent logistics, real-time fault detection, asset tracking, remote visual monitoring, and remote robot control. These new applications could push the Quality of Service (QoS) requirements to extreme values, targeting, e.g., Packet Error Rate (PER) of \(10^{-9}\) and latency below 1 ms [3]. Traditional technologies are not able to achieve such performance, and it is common belief that new communication strategies and protocols are needed [2].
There are multiple candidate technologies for Industry 4.0 and debates are ongoing about which one should be the key players. In this paper, we explore the potential of millimeter waves (mmWaves) in smart industry, focusing on the IEEE 802.11ad standard for communication at 60 GHz, and on its recent evolution, 802.11ay. The spectrum scarcity at 2.4 and 5 GHz and the resulting congestion have pushed a growing interest in the Extremely High Frequency (EHF) band, where the very large amount of bandwidth available greatly increases the system capacity and flexibility [4]. Despite its high potential, the use of mmWaves in smart factory is yet to explore. The peculiar characteristics of signal propagation at EHF, like the strong attenuation and sensitivity to blockage, raise novel issues that need to be solved, and new mechanisms such as beamforming are needed to provide efficient mmWave communication. In this paper, we describe a work-cell scenario to explain the role that mmWaves may play in Industry 4.0, and the main areas of research for the development of an effective industrial mmWave network.
The rest of the paper is organized as follows. Section 2 describes the characteristics of industrial automation scenarios, and provides an overview of the currently used technologies and their limitations. Section 3 introduces mmWaves and the 802.11ad/ay standards, while Sect. 4 discusses the potential and the areas of research to integrate mmWaves in smart industry through the example of a factory work-cell. Finally, Sect. 5 concludes the paper.
2 Smart Manufacturing Now
In the following, we first describe the manufacturing communication requirements, and then introduce the wireless technologies mostly used at the moment, and discuss their limitations in providing the QoS of Industry 4.0.
2.1 Networking Requirements in Industries
At its most fundamental level, industrial automation is historically divided into two main categories that include most of its typical applications: Process Automation (PA) and Factory Automation (FA) [5]. PA concerns the automatic control of a continuous process, like heating, cooling, stirring, and pumping procedures; usually the monitored values change relatively slowly and have no stringent requirements (latency larger than 100 ms [5]), and the typical communication range is about 100–500 m. FA instead refers to the automation of operations in the production of items such as cars and electronics. FA applications may generate bursty data and typically have stricter requirements than PA ones (latency of 1–50 ms [5]), and shorter communication range, in the order of tens of meters. Within these two macrocategories, there are a large variety of industry environments, which differ for application requirements (latency, PER, scalability, security, data rate, field coverage, etc.) and network characteristics (data size, topology, device mobility profile, etc.).
A major focus in Industry 4.0 is to achieve very low latency and high reliability communication to enable smooth and efficient operation and fast response to warnings and failures. Applications like control systems (for both PA and FA), automated guided vehicles, asset tracking and remote control robots may require a PER in the order of \(10^{-9}\), and end-to-end latencies in the range of 0.5–5 ms [3, Table 1]. The ability to handle heterogeneous application requirements and device capabilities is also a key requirement.
2.2 Current Wireless Technologies
Although wired communications have been traditionally adopted for use in industrial systems because they provide direct and reliable connections, they also have their own limitations: poor scalability, very limited reconfigurability, minimal flexibility, and physical degradability [6]. Moreover, the increasing presence of moving machines and robots pose a challenge to the use of wired cables. To overcome these issues, wireless communications have become popular in factory plants, but at the cost of reduced reliability and timeliness. Currently, industry automation is spangled with standards and proprietary solutions. Table 1 reviews the core features of the main wireless networking technologies currently employed in industry automation: WirelessHART, ISA100.11a, the Wireless networks for Industrial Automation-Process Automation (WIA-PA) standard, and Wireless Interface for Sensors and Actuators (WISA), which has partly been standardized in Wireless Sensor Networks for Industrial Automation - Factory Automation (WSAN-FA). Interested readers can refer to [5,6,7] for thorough descriptions and comparisons of these standards.
WirelessHART, ISO100.11a and WIA-PA target PA applications and are based on the IEEE 802.15.4 standard. They use a Time Division Multiple Access (TDMA) schedule, with slots that can either be used in a dedicated way or shared among users, and communication is made more robust thanks to the frequency hopping mechanisms. These standards generally provide good performance in monitoring and control applications, but are not able to guarantee the ultra-high reliability and ultra-low latency required by emerging applications such as smart manufacturing and remote robot control. In particular, a major limitation is the slot duration of 10 ms, which prevents the deployment of WirelessHART, ISA100.11a and WIA-PA for time critical applications.
Protocols for FA are instead typically designed to support real-time requirements and provide latencies of few milliseconds, to avoid interruptions in the manufacturing process. WISA, for example, targets sensor and actuator devices on the field level and has very short slots, which yield a typical latency on the air interface of 5 ms but also limits the system capacity to 64 bits per time slot. Moreover, WISA is not recommended for energy-constrained applications, because it relies on the IEEE 802.15.1 standard, which has high power consumption. WISA is not able to support QoS and security over heterogeneous network segments [6] and is proprietary, thus lacking openness and interoperability. This last issue can be overcome by using the WSAN-FA standard, based on WISA.
Although current wireless technologies are suitable for some of the applications of Industry 4.0, clearly no solution can serve all the disparate possible scenarios, and the capabilities of new available technologies need to be investigated [2]. In the next sections, we will explore the potential use of mmWaves.
3 Communication at mmWaves
Millimeter waves commonly denote the portion of spectrum between 30 and 300 GHz, which corresponds to wavelengths in the range from 1 to 10 mm. mmWaves have been gaining a lot of momentum in telecommunications thanks to the large band of spectrum available; for example, there are 7 GHz of continuous spectrum (from 57 to 64 GHz) in the 60 GHz frequency band. This large bandwidth has the potential to eliminate many of the issues of the overcrowded sub-6-GHz bands and allows for channels with larger bandwidth and, thus, higher capacity.
The propagation environment in the mmWave spectrum is significantly different from that at sub-6-GHz frequencies, and is characterized by a high propagation loss and a significant sensitivity to blockage. However, the high attenuation may be an advantage for applications with short range, since it makes interference from adjacent transmissions negligible. Moreover, the coverage ranges can be increased through beamforming, by focusing the power (both in transmission and in reception) towards the chosen direction yielding a so-called directional link. This can obtained by properly steering the antenna elements of the antenna arrays, which, thanks to the short wavelengths, can be extremely compact and easily embedded into sensors and handsets. The small form factors also facilitate the deployment of Multiple-Input Multiple-Output (MIMO) systems.
Directional transmission opens up new possibilities. With all the power focused in a specific direction, the gain in the other directions is low: this significantly reduces interference among concurrent transmissions, which is one of the main issues in the overcrowded sub-6-GHz bands. The consequent high potential for spatial reuse can boost the network performance. Notice, however, that beamforming is a delicate process. First, beamforming training is necessary to establish a directional link (avoiding the use of inefficient quasi-omnidirectional communication), then beam tracking is needed to maintain the communication link. Beam misalignment may prevent communication, resulting in the so-called deafness issue, and poorly trained beams lead to extreme throughput drops of up to 6.5 Gbps in 802.11ad [8]. Extensive research is ongoing to develop mechanisms for efficient beamforming training and beam tracking [9, 10].
Because of the peculiar characteristics of the signal propagation at EHF, protocols designed for lower frequencies cannot simply be transposed to the mmWave band, but major design changes are required for both PHY and Medium Access Control (MAC) layers. This pushed a standardization effort from several international organizations. In this paper, we focus on the IEEE 802.11ad and 802.11ay standards, which operate in the 60 GHz unlicensed band.
3.1 802.11ad
Ratified in December 2012, the 802.11ad amendment to the IEEE 802.11 standard targets short range mmWave communication in local area networks [11]. Since it can also be used in Personal Basic Service Sets (PBSSs) (i.e., network architectures for ad hoc modes), the central coordinator of 802.11ad networks can be either a PBSS Control Point (PCP) or an Access Point (AP); accordingly, it is generally denoted as PCP/AP to include both infrastructures.
In the following, we give an overview of the PHY layer and the main aspects of the MAC layer, i.e., the beamforming protocol to manage directional transmissions and the hybrid medium access.
PHY Layer. The nominal channel bandwidth is 2.16 GHz, and there are up to 4 channels in the ISM band around 60 GHz, although channel availability varies from region to region. Only one channel at a time can be used for communication. There are 32 different modulation and coding schemes available, grouped into three different PHY layers, which differ for robustness, complexity, and achievable data rates (up to 6.75 Gbps).

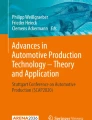
Structure of a BI. Green boxes correspond to beamforming training operations. The BHI is used for SLS with the PCP/AP: during the BTI, the PCP/AP trains its transmitting antenna pattern; during the A-BFT the other stations train their transmitting or receiving antenna patterns in dedicated slots. During the DTI, stations can perform both SLS and BRP phases with the PCP/AP and with other stations. (Color figure online)
MAC Layer. Medium access time is divided into Beacon Intervals (BIs), which are used to establish a directional communication link through beamforming training, and for data transmission. The maximum duration of a BI is 1 s, but it is typically chosen around 100 ms. 802.11ad introduces the concept of antenna sectors, which correspond to a discretization of the antenna space and reduces the number of possible beam directions to try. Beamforming training is realized in two subsequent stages: the Sector-Level Sweep (SLS) phase and the Beam Refinement Protocol (BRP) phase. The SLS is necessary to set up a link between the involved stations, with one station sequentially trying different antenna sector configurations while the other station has its antennas configured in a quasi-omnidirectional pattern. Notice that both the transmitting and the receiving antenna patterns can be trained. This determines the best coarse-grained antenna sector configuration. The BRP is then used to fine-tune this configuration using narrower beams and, possibly, to optimize the antenna weight vectors in case of phased antenna arrays. Since a directional link has already been established previously during the SLS phase, in BRP stations can avoid using quasi-omnidirectional patterns and use a more efficient modulation and coding scheme, achieving higher throughput and better communication range.
Each BI consists of two parts: the Beacon Header Interval (BHI) and the Data Transmission Interval (DTI), as shown in Fig. 1. The BHI replaces the single beacon frame of legacy WiFi networks and includes up to three access periods, all of them optional:
-
The Beacon Transmission Interval (BTI) is used for beamforming training of the PCP/AP’s antennas and network announcement. The PCP/AP broadcasts beacon frames through different sectors, performing the first part of the SLS phase with the other stations. The other devices have their receiving antennas configured in a quasi-omnidirectional pattern.
-
The Association-Beamforming Training (A-BFT) is divided into slots during which stations separately train their antenna sectors for communication with the PCP/AP, and provide feedback to the PCP/AP about the sector to use for transmitting to them. This completes the SLS phase started in the BTI to establish a link with the PCP/AP.
-
The Announcement Transmission Interval (ATI), used to exchange management information between the PCP/AP and associated and beamtrained stations, such as resource requests and allocation information for the DTI.
The DTI is used for data transmission. Prior to any additional frame exchange between stations, it is necessary to establish a link for directional communication; the DTI can also be used for beamforming training between stations (both SLS and BRP phases) and to perform the BRP phase with the PCP/AP. Since the BRP phase follows the SLS one, a reliable frame exchange is ensured and a station may transmit BRP packets along with other packets. The channel access is extremely flexible, thanks to three core characteristics:
-
The DTI is made up of contention-free Service Periods (SPs) for exclusive communication between a dedicated pair of nodes and Contention Based Access Periods (CBAPs) where stations compete for access. SPs and CBAPs can be in any number and combination, and their scheduling is advertised by the PCP/AP through beacons. This hybrid medium access allows to accomodate very diverse traffic patterns and application requirements.
-
Allocations can be defined as pseudostatic, which means that they recur in subsequent BIs. This option is useful for periodic and predictable traffic patterns, as it limits the related signaling and management message flow.
-
A dynamic channel time allocation mechanism allows stations to reserve channel time in almost real-time over both SPs and CBAPs. Stations can be polled by the PCP/AP and ask for channel time, which will be granted back to back. The dynamic mechanism also includes the possibility of truncating and extending SPs, to exploit unused channel time and finalize the ongoing communication without additional delay and scheduling, respectively.
3.2 802.11ay
With its Draft 1.0 published in November 2017, the 802.11ay amendment defines new PHY and MAC layers that enhance standard 802.11ad, with maximum achievable throughput of 100 Gbps and extended transmission distances of 300–500 m [12]. Backward compatibility and coexistence with 802.11ad are also ensured. The most relevant novelties of 802.11ay are the use of channel grouping mechanisms and of MIMO links, features that together yield improved channel access and beamforming training with respect to 802.11ad.
In 802.11ay there are up to 6 primary channels available, each with a bandwidth of 2.16 GHz, and they can be used in groups of 2, 3 or 4 through channel bonding and channel aggregation techniques. Unlike 802.11ad, 802.11ay supports MIMO, enabling multiplexing gain thanks to the use of multiple antenna elements that can be driven by different RF chains. In particular, 802.11ay supports Single-User (SU) MIMO and downlink Multi-User (MU) MIMO with transmissions to up to eight stations. There can be up to eight spatial streams per station, and the number of streams supported by a MIMO link depends on the environment, the antenna’s directivity and whether the antenna polarization is exploited. MIMO communication adds multiplexing gain to the beamforming gain obtained by using antenna arrays. In this way, diversity in the spatial domain is fully exploited, bolstering the communication robustness, and leading to very high Signal-to-Noise Ratio (SNR) links almost immune to fading.
4 mmWaves in Smart Factories: The Work-Cell Case
mmWaves unveil new possibilities with respect to sub-6-GHz frequency bands. Industrial automation includes a myriad environments, which span different network sizes, topologies, and modes of connectivity; we focus on a work-cell scenario to provide an example of the potential of mmWaves in Industry 4.0.

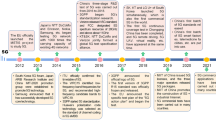
Simplified example of a work-cell.
4.1 Need of Ultra Reliable and Low Latency Communication
A work-cell is a cluster of equipment and workers that perform a specific task. Multiple work-cells may be grouped together to collectively manufacture a product, but they can be considered as autonomous and self-contained entities that perform separate production steps and have their own resources. This facilitates changes in internal processes, because it is possible to reconfigure only a subset of work-cells. A work-cell usually has a size in the order of tens of meters and includes 10–100 devices. Figure 2 shows a simplified illustrative work-cell.
Typically, every manufacturing step involves many sensors and actuators controlled by robot controllers, which are coordinated by some supervision intelligence. Most of the connections are still wired, which makes them often stressed by repeated movement, heat, corrosion, etc. Shielded cables are expensive and replacing them yields unproductive downtime. This, coupled with the desire of having reconfigurable work-cells as well as agile and mobile robotics, pushed interest in the use of wireless within a work-cell.
Achieving ultra low latency and high reliability in the work-cell communication enables smart robots and machines, able to operate alongside human workers or collaborating together towards a common goal. This is in fact hindered by “blind” machines, unable to detect nearby humans or objects and react accordingly, e.g., by changing their movements, slowing down their operating rate, or even shutting down completely. Such adaptive behavior is however necessary to protect human safety and achieve seamless cooperation within the work-cell. Humans can be provided with wearable sensors that send information about their presence to the robot controllers. Also the use of Vision Guided Robots (VGRs) is extremely helpful. A vision system all over the work-cell (e.g., on walls and ceilings), and possibly cameras embedded in the machines, enable a continuous monitoring of the environment. This information is used by the radio controllers for path planning and inverse kinematics decisions, i.e., to infer the movements needed by the robot to reach the desired position and orientation of its end-effectors, and to compute the corresponding joint angles. Such decisions are clearly affected by the presence of obstacles, and communication reliability and timeliness are essential to guarantee a successful performance. Notice also that, in the case of robots working together, the supervision intelligence needs to collect information from all the robot controllers to ensure smooth cooperation. Although VGRs already exist, their adoption is still limited to wired connections and hampered by the high monetary cost.
Another application that requires ultra reliable communication is represented by Safety Instrumented Systems (SISs), which are the systems responsible for monitoring the work-cell operating conditions and promptly triggering alarms whenever a risk condition occurs, to avoid accidents like fires, explosions, damages to equipment and, above all, human injuries. SISs are very time critical and need to report multiple simultaneous events in real time. Reliability is of utmost importance because human lives depend on its performance.
4.2 Potential of mmWaves in the Work-Cell Environment
Some distinctive aspects of communication at EHF could be decisive in achieving ultra low latency and reliability in the communication within the work-cell.
Channels in 802.11ad and 802.11ay have a bandwidth of 2.16 GHz, and the channel aggregation and bonding mechanisms provided in 802.11ay further increase the available bandwidth, allowing to use up to 4 channels jointly. The resulting bandwidth has the potential to yield peak data rates up to 100 Gbps in 802.11ay. This considerably helps the transmission of high-resolution videos and real-time motion capture, enhancing the performance of VGRs. Moreover, thanks to the small wavelength, the form factor of 60 GHz systems is approximately 140 times smaller compared to that of 5 GHz systems, so that compact radios can be easily deployed in robot arms, wheels, rotating engines, spindles, etc. [4].
A key advantage of mmWaves is that directional transmission severely mitigates the interference issues that choke the sub-6-GHz bands, enhancing throughput and timeliness. MmWave networks may operate in a noise-limited rather than interference-limited regime [13]; this, for example, helps collaborative robots to communicate simultaneously, and SISs to handle alarms from several components. A major concern for mmWave communication is the intrinsic high signal attenuation, exacerbated by the harsh propagation environment. Within the work-cell, it may in fact be difficult to establish a Line-of-Sight (LoS) link, due to the presence of numerous obstacles, metallic objects and machines, concrete walls, etc. Nonetheless, industrial environments mainly exhibit metallic scatterers, which have been shown to result in better mean channel capacity compared to wooden scatterers, because metallic structures result in more specular reflections [14]. Moreover, recent studies prove the suitability of mmWaves as PHY in industrial wireless networks [15]. Despite the impairments due to multipath, shadowing, non-LoS propagation, and moving devices, mmWave links can achieve reliable communication at a distance of tens of meters for a single hop, with performance of up to two orders of magnitude better compared to conventional sub-6-GHz wireless links in indoor industrial environments [15]. Notice also that the use of MIMO links (as introduced in the 802.11ay standard) helps exploiting the multipath propagation and could mitigate the propagation impairments of mmWaves in the work-cell and improve the communication robustness.
Finally, a distinctive feature of the 802.11ad/ay standards that is not directly related to mmWaves is the hybrid MAC, which can efficiently accommodate different traffic patterns and heterogeneous requirements. For example, the communication regime of a collaborative robot may change nearby a human worker: the reporting rate should increase to accurately monitor the obstacle position, while the movement speed should slow down, resulting in decreased feedback from the robot controllers to the actuators. SP allocations grant the use of dedicated resources and are particularly suitable for periodic reporting with QoS demands, like images sent by the VGRs in “normal” monitoring conditions, in the absence of obstacles. Directional communication enables spatial sharing, so that, e.g., multiple robot controllers could transmit with negligible cross interference. On the other hand, CBAPs may be preferable in case of less stringent QoS requirements because channel resources are available to more stations. CBAPs are distributed and robust, but the contention-based access may introduce delays in the message delivery, and the directional communication could alter the carrier sensing, erroneously showing the channel as idle. Finally, the dynamic allocation of channel time may prompt fast reaction to unexpected latency critical messages and accomodate bursty downstream traffic, since it allows quasi-real-time channel use; for example it could be extremely helpful for SISs.
4.3 Potential Areas of Research
The use of mmWaves in industrial scenarios requires additional research to investigate some issues prior to deployment, because the high potential described previously could be affected by an ill-designed implementation.
Directional Communication. Directionality reduces interference and increases spatial sharing, but, on the other hand, makes link maintenance and establishment tasks complex especially under device mobility, as misalignment of antenna beams leads to link disruption. Real-world measurements of the industrial propagation environment are necessary to build accurate signal propagation models [16] to be used as guidelines for the development of efficient beamforming training mechanisms. The network performance is significantly affected by beamforming training choices, like the number of sectors used, the beam widths, the way and order to try different sectors [9]. A careful planning of the SLS and BRP phases is also necessary: while the BRP introduces overhead and delays in the communication setup, it also enables more efficient directional communication with higher throughput, and this tradeoff impacts on latency and reliability.
Mobility. Another major focus should be the design of low latency beamsteering algorithms for fast link re-establishment to support seamless data provisioning even in case of device mobility. As shown in [17], the delay overhead of the beamforming training in 802.11ad is too burdensome for high mobility scenarios. A viable solution is to exchange the mmWave training information out-of-band, deploying a network operating in a heterogeneous manner [17]. Another strategy consists in beam tracking algorithms to “follow” a moving device and update the corresponding information on the sector to use [10]. Beam tracking induces less overhead than the full sector sweep of the SLS phase and allows to update the sector information adaptively, based on the mobility speed. However, the development of lightweight beam tracking algorithms is yet to be explored.
Power Consumption. The power consumption of mmWave communication may be high due to the use of large bandwidth and multiple antennas. A critical power drain for MIMO systems is the Analog-to-Digital Converter (ADC), and ongoing research tries to reduce the sampling rate and the quantization resolution of ADCs [18]. However, realizing low-power devices is not in itself sufficient, because the power consumption is also affected by network topology, channel access and routing protocols, and channel conditions. Energy efficiency thus needs to be explicitly included as a target in the design of processing algorithms and communication protocols. Notice that the 802.11ad and 802.11ay standards include a low-power single-carrier PHY for energy critical devices, and rules to prioritize their communication with respect to the other nodes.
Channel Access. To accomodate the heterogeneous traffic within the work-cell, it is necessary to design scheduling algorithms that fully exploit the high flexibility of the MAC layer of 802.11ad and 802.11ay. Each traffic pattern should be matched to the most appropriate type of allocation based on its characteristics and QoS demands. To this purpose, it is necessary to understand the performance achievable in the CBAP allocations depending on how much time is devoted to contention-free SPs [19], and, on the other hand, understand how to schedule SPs within a BI [20]. Another path that has not been explored is how to exploit the dynamic allocation mechanism of 802.11ad/ay.
5 Conclusions
Several emerging applications of Industry 4.0, like real-time error correction, VGRs, and intelligent logistics, have demanding reliability, timeliness and data rate requirements that current wireless technologies may be unable to satisfy. In this sense, mmWave communication may play a key role, thanks to the very large available bandwidth, the high achievable data rates, the compact radios, and the use of directional transmissions that mitigate interference.
The potential of mmWaves in industrial automation is still to be explored, and further investigation is needed prior to a successful deployment in smart industries. A main challenge is the development of beamforming training and beam tracking algorithms that are energy-efficient, with minimal latency overhead, and robust to the harsh industrial propagation environment. Moreover, it is necessary to design a transmission scheduler that fully exploits the hybrid channel access of 802.11ad/ay to optimally accomodate the QoS requirements.
A resilient and reliable smart factory will likely be accomplished by integrating diverse technologies, taking advantage of all of them with the possibility of switching across them in a flexible and context-aware fashion.
References
Rao, S.K., Prasad, R.: Impact of 5G technologies on industry 4.0. Wirel. Pers. Commun. 100(1), 145–159 (2018)
Candell, R., Kashef, M.: Industrial wireless: problem space, success considerations, technologies, and future direction. In: 2017 Resilience Week (RWS), pp. 133–139. IEEE, September 2017
Schulz, P., Matthe, M., Klessig, H., Simsek, M., Fettweis, G.: Latency critical IoT applications in 5G: perspective on the design of radio interface and network architecture. IEEE Commun. Mag 55(2), 70–78 (2017)
Athanasiou, G., Weeraddana, P.C., Fischione, C., Orten, P.: Communication infrastructures in industrial automation: the case of 60 GHz millimeterWave communications. In: IEEE 18th Conference on Emerging Technologies & Factory Automation (ETFA), pp. 1–6, September 2013
Wang, Q., Jiang, J.: Comparative examination on architecture and protocol of industrial wireless sensor network standards. IEEE Commun. Surv. Tutor. 18(3), 2197–2219 (2016)
Christin, D., Mogre, P.S., Hollick, M.: Survey on wireless sensor network technologies for industrial automation: the security and quality of service perspectives. Future Internet 2(2), 96–125 (2010)
Petersen, S., Carlsen, S.: WirelessHART versus ISA100.11a: the format war hits the factory floor. IEEE Ind. Electron. Mag. 5(4), 23–34 (2011)
Nitsche, T., Cordeiro, C., Flores, A.B., Knightly, E.W., Perahia, E., Widmer, J.C.: IEEE 802.11ad: directional 60 GHz communication for multi-Gigabit-per-second Wi-Fi. IEEE Commun. Mag. 52(12), 132–141 (2014)
Kutty, S., Sen, D.: Beamforming for millimeter wave communications: an inclusive survey. IEEE Commun. Surv. Tutor. 18(2), 949–973 (2016)
Satchidanandan, B., Yau, S., Kumar, P., Aziz, A., Ekbal, A., Kundargi, N.: TrackMAC: an IEEE 802.11ad-compatible beam tracking-based MAC protocol for 5G millimeter-wave local area networks. In: International Conference on Communication Systems & Networks (COMSNETS), pp. 185–182. IEEE, January 2018
IEEE 802.11 WG: IEEE 802.11ad, amendment 3: enhancements for very high throughput in the 60 GHz band, December 2012
Ghasempour, Y., da Silva, C.R.C.M., Cordeiro, C., Knightly, E.W.: IEEE 802.11ay: next-generation 60 GHz communication for 100 Gb/s Wi-Fi. IEEE Commun. Mag. 55(12), 186–192 (2017)
Shokri-Ghadikolaei, H., Fischione, C., Popovski, P., Zorzi, M.: Design aspects of short-range millimeter-wave networks: a MAC layer perspective. IEEE Netw. 30(3), 88–96 (2016)
Cheffena, M.: Industrial wireless communications over the millimeter wave spectrum: opportunities and challenges. IEEE Commun. Mag. 54(9), 66–72 (2016)
Saponara, S., Giannetti, F., Neri, B., Anastasi, G.: Exploiting mm-wave communications to boost the performance of industrial wireless networks. IEEE Trans. Ind. Inform. 13(3), 1460–1470 (2017)
Rappaport, T.S., MacCartney, G.R., Samimi, M.K., Sun, S.: Wideband millimeter-wave propagation measurements and channel models for future wireless communication system design. IEEE Trans. Commun. 63(9), 3029–3056 (2015)
Mavromatis, I., Tassi, A., Piechocki, R.J., Nix, A.: MmWave system for future ITS: a MAC-layer approach for V2X beam steering. In: IEEE 86th Vehicular Technology Conference (VTC-Fall), pp. 1–6. IEEE, September 2017
Alkhateeb, A., Mo, J., Gonzalez-Prelcic, N., Heath, R.W.: MIMO precoding and combining solutions for millimeter-wave systems. IEEE Commun. Mag. 52(12), 122–131 (2014)
Hemanth, C., Venkatesh, T.: Performance analysis of contention-based access periods and service periods of 802.11ad hybrid medium access control. IET Netw. 3(3), 193–203 (2013)
Khorov, E., Ivanov, A., Lyakhov, A., Zankin, V.: Mathematical model for scheduling in IEEE 802.11ad networks. In: Wireless and Mobile Networking Conference (WMNC), pp. 153–160. IEEE, July 2016
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Pielli, C., Ropitault, T., Zorzi, M. (2018). The Potential of mmWaves in Smart Industry: Manufacturing at 60 GHz. In: Montavont, N., Papadopoulos, G. (eds) Ad-hoc, Mobile, and Wireless Networks. ADHOC-NOW 2018. Lecture Notes in Computer Science(), vol 11104. Springer, Cham. https://doi.org/10.1007/978-3-030-00247-3_6
Download citation
DOI: https://doi.org/10.1007/978-3-030-00247-3_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-00246-6
Online ISBN: 978-3-030-00247-3
eBook Packages: Computer ScienceComputer Science (R0)