
Abstract
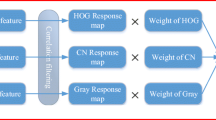
In target tracking, only the single feature description target and the traditional model updating method are difficult to adapt to the occlusion, deformation and various complex scene changes of the target. To solve this problem, a correlation filter tracking algorithm based on multi-feature fusion and selective update model is proposed. Firstly, the filter model is trained by direction gradient histogram and color feature respectively, and two features are fused according to the peak sidelobe ratio of the different characteristic response maps in the detection stage. The target location of the target is judged to be blocked by the peak sidelobe ratio of the final target position response map of each frame, and the model does not update when the target is blocked. The current model continues to be tracked in the next frame. A comparison experiment is made between 12 challenging video sequences and multiple forward moving target tracking algorithms. The results show that the average center position error is reduced by 25.12 pixels compared with the suboptimal Color Names, CN, and the average tracking accuracy is increased by 29.31%. The experimental results show that the algorithm can track the target steadily and accurately in the case of scale changes, occlusion, and illumination changes.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Marchand, E., Uchiyama, H., Spindler, F.: Pose estimation for augmented reality: a hands-on survey. IEEE Trans. Vis. Comput. Gr. 22(12), 2633–2651 (2016)
Bolme, D.S,, Ross Beveridge, J.R., Draper, B.A., et al.: Visual object tracking using adaptive correlation filters. In: Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 2544–2550. IEEE, Piscataway (2010)
Henriques, J.F., Rui, C., Martins, P., et al.: High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 37(3), 583–596 (2015)
Danelljan, M., Khan, F.S., Felsberg, M., et al.: Adaptive color attributes for real-time visual tracking. In: Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 1090–1097. IEEE, Piscataway (2014)
Danelljan, M., Häger, G., Khan, F.S., et al.: Accurate scale estimation for robust visual tracking. In: Proceedings of the British Machine Vision Conference 2014, BMVA Press (2014)
Li, Y.: Research on Target Tracking Method Based on Nuclear Correlation Filter. Southwest University of Science and Technology, Mianyang (2017)
Mao, N., Yang, D.D., Yang, F.C.: Adaptive target tracking based on layered convolution features. Laser Optoelectron. Prog. 53(12), 201–212 (2016)
Xia, Y.X.: Research on Correlated Filtering Target Tracking Algorithm. Huaqiao University, Quanzhou (2017)
Zhao, G.P., Shen, Y.P., Wang, J.Y.: Self-adaptive feature fusion target tracking based on cyclic core structure. Chin. J. Opt. 37(08), 208–217 (2017)
Wu, Y., Lim, J., Yang, M.H.: Online object tracking: a benchmark. In: Proceedings of 26th IEEE Conference on Computer Vision and Pattern Recognition, pp. 2411–2418. IEEE Press, New York (2013)
Acknowledgments
This work has been supported by the National Natural Science Foundation of China under Grant No. 61462052.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
YiZheng, Z., Shang, Z., Liu, H., Li, R. (2019). Robust Tracking Based on Multi-feature Fusion. In: Deng, K., Yu, Z., Patnaik, S., Wang, J. (eds) Recent Developments in Mechatronics and Intelligent Robotics. ICMIR 2018. Advances in Intelligent Systems and Computing, vol 856. Springer, Cham. https://doi.org/10.1007/978-3-030-00214-5_68
Download citation
DOI: https://doi.org/10.1007/978-3-030-00214-5_68
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-00213-8
Online ISBN: 978-3-030-00214-5
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)